Автоматизована система контролю рівня
Автоматизована система контролю і керування рівня в технологічних резервуарах
Склад системи
- Сервер - персональний комп'ютер;
- Давачі рівня;
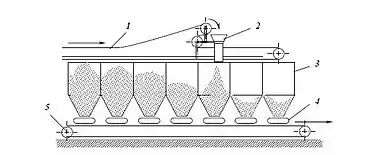
- Панелі індикаторів розташовувані поблизу контрольованих бункерів (ємностей, резервуарів) і призначені для відображення на лінійно-шкальних приладах значень рівнів.
Функції системи
- Безперервний контроль рівнів у бункерах (ємностях) сипучих матеріалів або рідин.
- Обчислення вагової кількості залишків сипучих матеріалів у бункерах по заданій щільності заповнення бункерів.
- Сигналізація граничних заданих рівнів у бункерах (ємностях) і блокування технологічного устаткування.
- Видача керуючих сигналів для систем керування завантаженням бункерів.
- Видача керуючих сигналів для систем керування для розвантаження бункерів і шихтовки матеріалу.
- Формування та дистанційна передача інформації про рівні в цифровому коді на автоматизоване робоче місце технолога.
- Збереження значень параметрів за заданий період часу, видача їх на екран дисплея або друк у вигляді таблиць і графіків.
Принцип дії
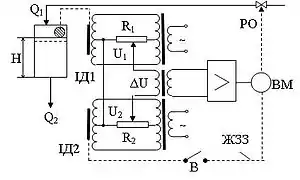
На рис. показана спрощена система регулювання рівня (Н) в технологічному апараті, де надходження рідкого продукту – Q1 (керуючий параметр), Q2 – споживання продукту (збурення по навантаженню). Наведений на схемі об’єкт буде астатичним, якщо забезпечити незалежність витрати (Q2) від рівня в апараті (Н). При цьому споживання продукту може здійснюватися, наприклад, через шестерінчастий насос. Якщо ж допустити вільне витікання рідини, об’єкт буде статичним.
Як датчик рівня, наприклад, прийнятий поплавок з індуктивним датчиком (ІД1), включеним у мостову схему.
Регулюючий пристрій містить схему порівняння сигналів, побудовану на двох мостах змінного струму з індуктивними датчиками і трансформаторами, підсилювач і виконавчий механізм (ВМ) з регулюючим органом (РО).
Виконавчий механізм забезпечений індуктивним датчиком положення (ІД2), який виконує роль жорсткого зворотного зв’язку (ЖЗЗ). На схемі умовно передбачене відключення зворотного зв’язку за допомогою переривника (В). Таким чином, при відключеному зворотному зв’язку регулюючий пристрій реалізує І-закон регулювання, при включеному – П-закон.
Автоматична система контролю рівня рідини (модель)
Об'єкт керування моделюється ємністю, рідина з якої через регулювальний орган (ОР2) і проміжну ємність (ПЄ) насосом повертається у вихідний об'єкт. Як датчик рівня застосований поплавок, постачений індукційно-трансформаторним перетворювачем. Регулювальний орган РО1 служить для збурюючого впливу на об'єкт регулювання.
Елемент порівняння, задатчик і підсилювач входять до складу серійного регулятора Р-25.12, поміщеного на стенді.
Система регулювання діє в такий спосіб. При поточному значенні рівня рідини, рівному заданому, виділюваний на елементі порівняння сигнал (ΔU) дорівнює нулю. Цей стан об'єкта характеризується матеріальним балансом вихідної рідини (Q1) і споживаної (Q2). Система перебуває в очікувальному режимі. З появою збурювання, наприклад, з боку витрати рідини Q1 змінюється її рівень в об'єкті, що супроводжується зміною сигналу поточного значення Uт й, як наслідок, сигналу неузгодженості ΔU. З урахуванням фази даного сигналу регулятор через виконавчий механізм (ВМ) і регулювальний орган (ОР2) змінює витрату рідини (Q2) до моменту настання матеріального балансу. Алгоритм формування керуючого сигналу визначається законом регулювання, закладеного в регуляторі.
Область застосування
Система застосовується в ряді галузей промисловості, зокрема, у хімічній, нафтопереробній, гірничій, будівельній тощо.