Метод Гука — Дживса
Метод Гука — Дживса (англ. Hooke — Jeeves) або пошук за зразком (англ. Pattern search) так само, як і метод Нелдера–Міда, призначений для пошуку безумовного локального екстремуму функції і відноситься до прямих методів, тобто спирається безпосередньо на значення функції. Алгоритм складається з двох фаз: досліджуючий пошук і пошук за зразком.
Опис
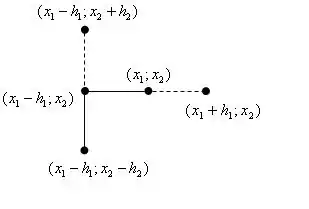
На початковому етапі задається стартова точка (позначимо її 1) і кроки hi по координатах. Потім заморожуємо значення всіх координат крім 1-ї, обчислюємо значення функції в точках x0+h0 і x0-h0 (де x0 — перша координата точки, а h0 — значення кроку по цій координаті) і переходимо в точку з найменшим значенням функції. У цій точці заморожуємо значення всіх координат крім 2-ї, обчислюємо значення функції в точках x1+h1 i x1-h1, переходимо в точку з найменшим значенням функції і т. д. для всіх координат. У випадку, якщо для будь-якої координати значення у вихідній точці менше, ніж значення для обох напрямків кроку, то крок по цій координаті зменшується. Коли кроки по всіх координатах hi стануть менше відповідних значень ei, алгоритм завершується, і точка 1 визнається точкою мінімуму.
Ілюстрація першого етапу для двох координат:
Таким чином, провівши досліджуючий пошук по всіх координатах, ми отримаємо нову точку з найменшим значенням функції в околі (позначимо її 2). Тепер можна перейти до 2 фази алгоритму.
На етапі пошуку за зразком відкладається точка 3 в напрямку від 1 до 2 на тій же відстані. Її координати знаходять за формулою , де xi — точка з номером i, λ — параметр алгоритму, зазвичай вибирають рівним 2. Потім в новій точці 3 проводиться досліджуючий пошук, як на першій фазі алгоритму, за винятком того, що крок не зменшується. Якщо на цій фазі в результаті досліджуючого пошуку вдалося отримати точку 4, відмінну від точки 3, то точку 2 позначимо як 1, а 4 як 2 і повторимо пошук за зразком. Якщо не вдається знайти точку 4, відмінну від точки 3, то точку 2 позначимо як точку 1 і повторимо першу фазу алгоритму — досліджуючий пошук.

Ілюстрація другого етапу для двох координат:
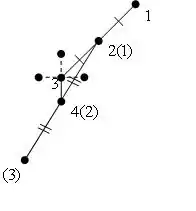
У дужках зазначені імена точок після перевизначення. На ілюстрації добре помітно, як алгоритм коригує свій напрямок в залежності від знайдених значень функції.
Переваги
Даний алгоритм володіє властивістю «прискорюватися», що сприяє підвищенню його загальної ефективності. Друга перевага методу Гука—Дживса — можливість отримання за його допомогою наближеного рішення, якість якого безупинно підвищується на всіх стадіях чисельного рішення. Особливо явно переваги подібних засобів виявляються при відшуканні екстремумів на гіперповерхнях, які містять глибокі вузькі западини, тобто тоді, коли градієнтні методи неефективні. Також перевагами даного методу є проста стратегія пошуку і невеликий обсяг необхідної пам'яті.
Недоліки
Алгоритм заснований на циклічному русі по координатам, що може привести до виродження алгоритму в нескінченну послідовність пошуків через дослідження без пошуку за зразком. При використанні методу передбачається, що цільова функція яка досліджується, є унімодальною, тобто має на інтервалі дослідження тільки один оптимум. Це означає, що розв'язком може стати локальний мінімум, а не глобальний, якщо на досліджуваній області присутні кілька мінімумів.
Лiтература
- Р. Гук, Т. А. Дживс «Прямой поиск решения для числовых и статических проблем», 212—219 с., 1961.
- C. T. Kelley. Iterative methods for optimization, 180 p
Посилання
- https://web.archive.org/web/20120905151449/http://www.theweman.info/topics/t4r5part1.html
- Методы многомерное оптимизации в Интуит.ру.
- А.В. Аттетков, С.В. Галкин, В.С. Зарубин. {{{Заголовок}}}.[недоступне посилання з квітня 2019]