Перехідна функція
Перехідна́ фу́нкція — у системах автоматичного регулювання — зміна вихідної величини у часі при подачі на вхід одиничного ступінчастого впливу (перехід системи регулювання від одного сталого режиму до іншого). Рис. 1.
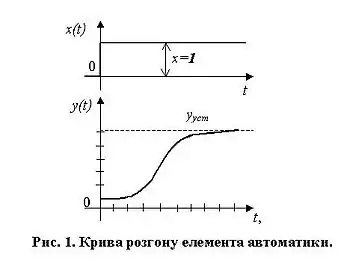
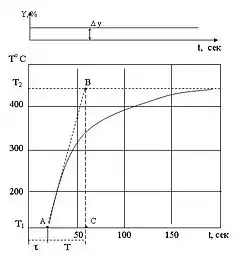
Рис. 2.Крива розгону статичного об'єкта. Графічне визначення параметрів кривої розгону.
Розрізняють також імпульсну перехідну функцію (функція ваги) — зміну вихідної величини у часі при подачі на вхід одиничного імпульсного впливу.
Перехідна характеристика — графічне зображення перехідної функції.
Крива розгону — перехідна характеристика керованого об'єкта.
Визначення параметрів кривої розгону
Основними параметрами кривої розгону статичних об'єктів регулювання першого порядку є:
- постійна часу, Т,
- транспортне запізнювання, τ,
Їх визначення графічним методом показано на рис. 2.
Література
- Папушин Ю. Л., Білецький В. С. Основи автоматизації гірничого виробництва. — Донецьк : Східний видавничий дім, 2007. — 168 с. — ISBN 978-966-317-004-6.
- Іванов А. О. Теорія автоматичного керування: Підручник. — Дніпропетровськ: Національний гірничий університет. — 2003. — 250 с.
- Енциклопедія кібернетики. тт. 1, 2. — К.: Головна редакція УРЕ, 1973. — 584 с.
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.