Прилад оцінки прохідності-Марс
Прилад оцінки прохідності-Марс (Проп-М) — так називалися радянські марсоходи, перші у світі створені людиною, які були доставлені на Марс.
Вони були доставлені на поверхню Марса в 1971 за допомогою АМС «Марс-2» (27 листопада) і «Марс-3» (2 грудня), проте свою місію не виконали. Апарат «Марс-2» розбився при посадці, а «Марс-3» працював тільки 20 секунд (імовірно вийшов з ладу через пилову бурю). Апарат «Марс-2» став першим рукотворним об'єктом, що досяг поверхні Марса.
Загальні відомості
Апарати повинні були переміщатися по поверхні за допомогою двох лиж, що знаходяться з боків, трохи підводять апарат над поверхнею. На поверхню, в область видимості телекамер, його помістив би маніпулятор. Два тонких бруска попереду є датчиками виявлення перешкод на шляху. Рухомий апарат міг визначити, з якого боку знаходиться перешкода, відступити від нього і спробувати обійти. Кожні 1,5 метра він робив би зупинки для підтвердження правильності курсу руху. Цей елементарний штучний інтелект був необхідний для марсіанських рухливих апаратів, оскільки сигнал від Землі до Марса йде від 4 до 20 хвилин, що занадто довго для рухливого робота. До моменту приходу команд із Землі, апарат, можливо, вже вийшов би з ладу.
Апарати Проп-М були призначені для дослідження ґрунту Марса в безпосередній близькості від поверхні. Прилади зв'язувалися з посадковим ступенем інформаційним кабелем, і тому здатні були віддалятися не більше ніж на 15 метрів від місця посадки.
Історія проекту
Під час підготовки апарата Марс-3, провідний фахівець «ВНІІтрансмаш» В. В. Громов запропонував замінити балансувальний вантаж на «Прилад оцінки прохідності». Ця ідея була підтримана, і досить швидко реалізована, хоча і зажадала додаткових зусиль: реалізації самого марсоходу, його наземного відпрацювання, реалізації пристрою виносу марсохода на поверхню, забезпечення його електроживленням та зв'язком з посадковим модулем, тощо
Саме через те, що марсохід замінив балансувальний вантаж — його маса згідно з технічними вимогами не повинна була перевищувати 5 кг. Тому сам марсохід вийшов дуже простим.
Після завершення місій КА Марс-2 і Марс-3, коли два марсоходи були безповоротно втрачені, несподівано знайшли третій — на Землі. Адже коштували ці апарати не так багато, і виготовити третій примірник для будь-яких перевірочних потреб було дуже легко. Цей самий, третій примірник — знаходиться понині в музеї ГДЛ Петропавлівській фортеці в Санкт-Петербурзі.
Конструкція
Пристрій шасі
В першу чергу шасі були призначені для вимірювання несучої здатності і щільності марсіанського ґрунту.
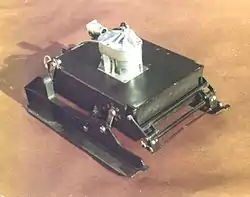
Вкрай цікавий спосіб переміщення перших у світі марсоходів — лижно-крокуючий. Як можна побачити на малюнку, кожен апарат являв собою невеликий ящик з лижами з обох боків. Рух апарата здійснювався наступним чином: спираючись на лижі, апарат піднімав свій корпус та пересував його вперед, апарат сідав на днище і лижі переміщалися для наступного кроку вперед.
Поворот здійснювався переміщенням лиж у різні боки. У випадку, якщо апарат зустрічав перешкоду (торкання двоконтактного бампера спереду), він автономно здійснював об'їзд згідно з наступним алгоритмом: відхід назад, поворот на деякий кут, рух вперед. Це елементарний штучний інтелект був необхідний для цих марсіанських Роверів, оскільки подорож сигналу з Землі на Марс може зайняти від 4 до 20 хвилин, що занадто довго для крокуючого робота, чекаючого команди із Землі. Надто до того часу, доки перешкоду помітять оператори Проп-М і подадуть відповідні команди з Землі, до того моменту Проп-М міг би вже бути втраченим[1].
Вони несли на борту датчики і системи автоматичного управління, щоб вони могли рухатися навколо об'єктів[2].
На етапі коли дослідження інших планет знаходилося в зародковому стані для оцінки поверхні планети постало питання вибору рухової установки. переваги цього виду шасі «лижно-крокуючий рушій забезпечує високі тягово-зчіпні властивості на сипучих ґрунтах». Також, подібний апарат міг би повзти по дуже тонкому льоду і не провалюватися. Головний недолік апарату — безперечно, мала швидкість.
Корпус
У самому «чорному ящику» розташовувалися, крім наукових приладів для власне оцінки прохідності ґрунту — наступні компоненти:
- Мікроконтролер
- Приймач пристрої зв'язку для управління марсоходом (зв'язок проводилася по кабелю апарату, що спускається)
- Приймач блоку живлення (теж по кабелю) — живлення йшло як мінімум на три схеми: схему управління та 2 схеми двигунів
- Двигуни — по одному на кожну лижу, причому, як видно на малюнку — лижа кріпилася до корпусу в трьох місцях. До двох передніх кріплень були підведені редуктори двигуна, а заднє кріплення було «холостим». Моторчики повинні були бути досить потужними, щоб піднімати і переносити всю масу марсоходу.
Мікроконтролер був налаштований на об'їзд перешкод і плюс виконання команд або послідовностей команд оператора. Апарат був оснащений конусом для виміру міцності поверхні шляхом тиску на неї цим конусом.
Характеристики
- Маса — 4,5 кг
- Розміри корпусу (д*ш*в) — 25 см х 22 см х 4 см
- Спосіб пересування — крокуюче шасі з датчиками виявлення перешкод.
- Швидкість пересування — 1 метр / год. (Після переміщення на 1 метр, марсохід зупинявся для отримання команд управління з Землі).
- Наукові прилади — динамічний пенетрометр і гамма-променевий денситометр.
- Керування — дистанційне, по кабелю від спускного апарату АМС. Довжина кабелю — 15 метрів.
- Місія — вимірювання щільності ґрунту.
- Проектувальник і виробник — ВНІІТрансМаш
- Головний конструктор — Олександр Леонович Кемурджіан
Марсіанська місія

8 червня, а також 14 листопада та 2 грудня 1971 були проведені корекції орбіти «Марса-3». Відділення спускного апарату здійснено 2 грудня о 11 год 14 хв за київським часом на відстані 50 тис. км від Марсу. Через 15 хвилин, коли відстань між орбітальним відсіком і спускним апаратом було не більше 1 км, апарат перейшов на траєкторію зустрічі з планетою.
Апарат рухався 4,5 години до Марса і о 15 годині 44 хвилини увійшов в атмосферу планети. Спуск в атмосфері до поверхні тривав трохи більше 3 хвилин. Спускаємий апарат здійснив м'яку посадку в південній півкулі Марса в районі з координатами 45 ° пд.ш. і 158 ° з.д. На борту апарата був встановлений вимпел із зображенням Державного герба СРСР.
«Марс-3» працював тільки 20 секунд і припинив роботу швидше за все через сильну пилову бурю.
Орбітальний відсік «Марса-3» після відділення апарату, що спускається рухався по траєкторії, що проходить на відстані 1500 км від поверхні Марса. ГДУ забезпечила перехід його на орбіту супутника Марс з періодом обертання ~ 12 діб 19 ч. 2 грудня о 15 год 50 хв 35 с почалася передача відеосигналу з поверхні планети.
Сигнал був прийнятий приймальними пристроями орбітального відсіку і в сеансах зв'язку 2 — 5 грудня переданий на Землю.
Додаткові відомості
Не запущений екземпляр марсоходу виставлений в музеї ГДЛ в Петропавлівській фортеці в Санкт-Петербурзі.
Посилання
- Відеоролик, що демонструє принцип пересування Проп-М[недоступне посилання з квітня 2019]
Примітки
- Архівована копія. Архів оригіналу за 29 серпня 2007. Процитовано 29 серпня 2007.
- Архівована копія. Архів оригіналу за 29 серпня 2007. Процитовано 29 серпня 2007.