Активна радіолокація
Активна радіолокація — вид радіолокації, де РЛС «підсвічує ціль» і порівнює параметри сигналу свого опромінювання і відбитого сигналу.
Види сигналів, що застосовуються в ході здійснення радіолокації
- Носіями радіолокаційної інформації, що можуть застосовуватися РЛС, є сигнали, які приймаються від цілей. Ці сигнали можуть утворитися в результаті
- 1) вторинного випромінювання радіохвиль цілями під дією їх первинного опромінення;
- 2) перевипромінювання встановленими на цілях відповідачами (приймачами-передавачами) прийнятих радіохвиль (як системи виявлення «свій-чужий»;
- 3) власного випромінювання радіохвиль цілями.
- Розрізняють декілька методів радіолокації (в залежності від характеру утворення прийнятого радіосигналу)
- активна радіолокація (чи активна радіолокація з пасивною відповіддю),
- радіолокація з активною відповіддю (активна радіолокація з активною відповіддю)
- пасивна радіолокація.
Особливості активної радіолокації
В активній радіолокації (чи в активній радіолокації з пасивною відповіддю) радіосигнали, які приймаються, утворюються в результаті вторинного випромінювання (відбиття) радіоконтрасними цілями радіохвиль (пасивна відповідь), що випромінюються РЛС (коли РЛС «підсвічує ціль». Активний характер радіолокації проявляється в необхідності використання випромінювання РЛС.
Принцип роботи
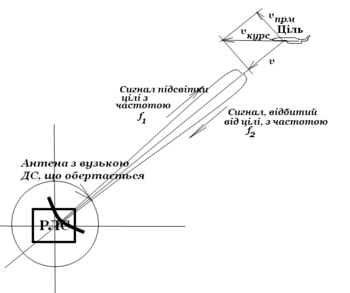
Радіопередавальний пристрій (РПП) формує потужні високочастотні коливання, які через антену передавача випромінюються в напрямку цілі. Випромінені коливання (зондувальний сигнал чи сигнал підсвітки), що досягли цілі, відбиваються від неї (як світло від дзеркала). Частина енергії відбитого сигналу приймається антеною приймача і надходить у радіоприймальний пристрій для аналізу та отримання інформації про ціль.
- Розрізняють
- Однопозиційний чи Поєднаний радіолокаційний засіб, — коли приймальна позиція розташована в безпосередній близькості від передавальної
- Якщо приймальний пункт віднесений від передавача на деяку базу Б, то радіолокаційний засіб називається рознесеним.
- База Б при цьому може бути постійною (дві машини розгорнуті на місцевості) чи змінною (машина на землі, головка самонаведення на ракеті, що рухається).
Радіолокаційна система (станція) може містити декілька рознесених у просторі передавальних, приймальних або приймально-передавальних позицій. Таку систему називають багатопозиційною.
Визначення дальності
Відомо, що швидкість розповсюдження радіохвиль — стала величина для вакуума[1] і може незначно зменшуватися в повітряному середовищі.
- Отже,
2S = vсвітла * Δt, звідки S = vсвітла * Δt / 2
Визначення пеленга на ціль
Обертання антени локатора — дальноміра синхронізоване з індикаторними пристроями, що дозволяє бачити «підсвічену» точку цілі і вираховувати пеленг на неї.
Визначення відносної колової і радіальної швидкості руху
Якщо ціль рухається, частота f1 сигналу підсвітки і частота сигналу f2, що відіб'ється від цілі, буде відрізнятися на частоту Δfдопл, яку називають доплерівською частотою. Значення доплерівської частоти дає змогу однозначно вирахувати колову швидкість цілі vпрм відносно точки РЛС прийому. Так, використовуючи ефект Доплера, активні радіолокатори дозволяють вираховувати не лише координати, а й колову швидкість цілі, що рухається (літак, гелікоптер, ракета, тощо). По такому ж принципу влаштовуються не лише далекоміри на наземних об'єктах, а й на рухомих літальних апаратах (скажімо, в пілотажно-навігаційних комплексах літаків, гелікоптерів чи головках самонаведення зенітних ракет).
Діаграми спрямованості антен приймачів РЛС мають вузьку видовжену форму. Організаційно розділяють пристрої як дальноміри і висотоміри.
Історія застосування
Історично так склалося, що перші засоби виявлення літаків працювали саме на принципах активної радіолокації. Як приклад, можна навести трьох-позиційні автомобільні комплекси дальнього виявлення літаків РУС-1 «Рєвєнь», що пройшли випробовування і використовувалися ще до початку Другої світової війни і в перші її роки.
Імпульсна РЛС РУС-2 «Редут» (П-1) була прийнята на озброєння тодішніх ВНОЗ (війська наземного оповіщення та зв'язку) влітку 1940 року та не мала аналогів у світі за своїми технічними характеристиками.[2]
Навіть сьогодні на озброєнні українських радіо-технічних військ ППО стоїть техніка, модернізована у 2010-х роках, але розроблена і введена в експлуатацію ще у 1970-х (приклад: радіопеленгатор П-18[3])
Переваги
- Засобами активної радіолокації можна виявити не лише напрям (пеленг на ціль, відстань до цілі, але й швидкість і напрям руху цілі, використовуючи ефект Доплера, що важливо при організації взаємодії з ціллю (скажімо, пуск ракети по цілі).
Недоліки
- При активній радіолокації РЛС змушена постійно чи імпульсно випромінювати сигнали підсвітки цілей. А, отже, основним недоліком активної радіолокації є її вразливість щодо засобів виявлення і подавлення (перешкодами) чи знищення (ракети, бомби, артилерія) засобами супротивника.
Активна радіолокація з активною відповіддю
Активна радіолокація з активною відповіддю — різновид активної радіолокації, коли сигнал відповіді формує спеціальний завчасно встановлений на об'єкті відповідач, скажімо, літаковий відповідач системи «свій-чужий». Окрім впізнавання цілей подібна система забезпечує одержання додаткової інформації про висоту польоту «свого» літака, запас пального на його борту, тощо, що є вкрай важливим для забезпечення безпеки авіапольотів.
Див. також
Джерела
- Лобанов М. М. Развитие советской радиолокационной техники / М. М. Лобанов. — М. : Воениздат, 1982.
- Розвиток радіолокаційних засобів ППО в роки Великої Вітчизняної війни. Короткий нарис / А. А. Гризо, I. М. Нсвмсржицький, В. М. Купрій, О. В. Тссленко // Наука і техніка Повітряних Сил Збройних Сил України. Науково-технічний журнал. — X. : ХУПС. — 2010. — Внп. 1(3). — С. 131—135.
- Справочник. Радиоэлектронные системы. Основы построения и теория / под ред. Я. Д. Ширмана. — М. : Радиотехника, 2007.
- Основы построения радиолокационного вооружения радиотехнических войск / под ред. В. В. Литвинова. — X. : ВИРТА ПВО, 1986.
- Пащенко Р. Е. Генерування та формування сигналів: навч. посіб. / Р. Е. Пащенко, I. В. Красношапка, Д. В. Максюта. — X. : ХУПС, 2011.
- Радіоелектронні системи: навч. посіб. / за ред. Ю. М. Сєдишева. -X. :ХУПС, 2010.
- Приемно-передающие устройства радиотехнических систем. Ч. 2 / під ред. Ю. М. Сєдишева. — X. : ВИРТА ПВО, 1992.
- Цифрові пристрої та мікропроцесори. Ч. 1 : навч. посіб. / за ред. К. В. Садового. — X. : ХУПС, 2007.
- Основы построения РЛС РТВ / под ред. Б. Ф. Бондаренко. — К. : КВИРТУ ПВО, 1987.
- Озброєння та військова техніка РТВ. Побудова РЛС П-37 : навч. посіб. / за ред. В. I. Звєрєва. — X. : ХУПС, 2007.
- Озброєння та військова техніка РТВ. Побудова РЛС 19Ж6. Ч. 1 : навч. посіб. / ДА. Гриб, В. Й. Климченко, В. М. Купрій, та ін. — X. : ХУПС, 2006.
- Barton, David Knox. Radar system analysis and modeling . — Nordwood, ARTECH HOUS, IN., 2005.
- Багдасарян С. T. Радіолокаційна системотехніка / С. Т. Багдасарян, Ю. В. Кулявець. С. І. Шипшин. — X. : ХВУ, 2002.
- Озброєння радіотехнічних підрозділів і частин ППО. Наземний радіолокаційний запитувач НРЗ-П: навч. посіб. / О. С. Матярснко, П. В. Овсянніков, С. П. Володько та ін. — X. : ХВУ, 2003.
Посилання
- bastion-karpenko.ru/desna-m-rls/ — РЛС 22Ж6М Десна
- hist.rloc.ru/lobanov/index.htm — М. М. Лобанов. Развитие советской радиолокационной техники
- www.hist.rloc.ru/startup-radars/index.htm — М. М. Лобанов. Начало советской радиолокации
Примітки
- Швидкість розповсюдження радіохвиль у вакуумі приблизно дорівнює швидкості світла і становить 299 792 458 м/с
- РЛС призначалась для виявлення цілей у повітрі й наведення по ним винищувальної авіації. Пересувний варіант РЛС використовувався ВНОЗ та мав назву РУС-2с «Пегматит» (П-2). Дальність виявлення РЛС становила 110 км при висоті цілі до 7 км. Сектор огляду за азимутом: 0 — 360°. Ширина діаграми спрямованості антени (ДСА) у горизонтальній площині: 40 — 45°. Точність визначення координат на цілі: за азимутом — 2°, за дальністю — 1000 м. Пошук цілей відбувався за допомогою обертання антени в межах сектора або ж шляхом обертання антени навколо своєї осі. Спостереження за появою сигналів, відбитих від цілей, велося за індикатором дальності. Дальність до цілі зчитувалась за шкалою індикатора дальності, а дані про азимут — зі шкали азимутального приладу. Визначення азимута проводилось за максимумом сигналу або методом «гойдання». Відлік кутів відбувався за азимутальною шкалою. Цілі супроводжувались вручну. Передача даних про ціль відбувалась по телефону або радіо. РЛС працювала в метровому діапазоні радіохвиль 4,12 м (близько 73 МГц) і мала імпульсну потужність до 100 кВт. Бойовий розрахунок станції складався з 3 людей.
- Створений у 1970 році на базі РЛС П-12, що, в свою чергу, був в експлуатації ще з кінця 1950-х років, а розроблений 1955 року; РЛС метрового діапазону радіохвиль