Пасивна радіолокація
Пасивна радіолокація — на відміну від активної радіолокації, де РЛС «підсвічує ціль» і порівнює параметри сигналу свого опромінювання і відбитого сигналу, — радіолокація об'єкта за його власним випромінюванням.
Це може бути об'єкт, що випромінює радіохвилі (ракета, літак, гелікоптер, радіостанція, станція РЕБ, інша активна РЛС, бронеоб'єкт де радіостанція працює на передачу, елементи мобільного стільникового зв'язку, тощо). Або локація проводиться по інфрачервоному випромінюванню (Теплова локація).
Переваги пасивної радіолокації
Значним недоліком будь-якої активної РЛС є необхідність випромінювання сигналу підсвітки цілей. Звісно, що по цьому сигналу противник, якщо мова йде про військову РЛС, має змогу здійснити наведення свого засобу придушення цілі (ракету, бомбу із радіо-керованою головкою самонаведення). Цей фактор є одним з необхідних, але вкрай небажаних ризиків, оскільки РЛС підлягає виявленню і подавленню (радіоперешкодами) чи знищенню (ракетою, бомбою, снарядом). Аналіз бойових дій засобів придушення радіовипромінюючих засобів і роботи сучасних активних РЛС дає змогу зробити висновок про вразливість цих РЛС засобами придушення супротивника, і, як результат, низьку ефективність сучасної системи ППО на основі активних РЛС.
Відсутність випромінювання сигналу підсвітки цілі, який ще називають зондуючим сигналом, при пасивній радіолокації значною мірою підвищує прихованість роботи пасивної РЛС, істотно ускладнює виявлення такої станції і створення їй радіоперешкод чи знищення.
Різновиди пасивної радіолокації
- Розрізняють пасивну радіолокацію об'єктів із штучним (радіопередавачі різного призначення) і природним (тепловим) випромінюванням радіохвиль.
- Приймання пасивною РЛС радіохвиль, які випромінюванюються земною і водною поверхнями, може бути використане для зняття радіолокаційної карти місцевості як в навігаційних цілях, так і періодичного огляду та порівняння місцевості з метою її розвідки, а також для виявлення окремих об'єктів з інтенсивним радіовипромінюванням та набору статистики щодо зміни інтенсивності такого випромінювання (активності радіовипромінюючої цілі).
- Як варіант алгоритму роботи, пасивні локатори «прив'язуються» на місці розгортання, формуючи в пам'яті свого бортового комп'ютера радіоконтрастну та інфрачервону мапи навколишньої місцевості чи сектора спостереження. Рішення про цілі приймається на підставі аналізу зміни обстановки на мапі і прийнятої в певний проміжок часу спостереження (локації).
Улаштування пасивної РЛС
Така РЛС має радіоприймач і антену з вузькою, голкоподібною діаграмою спрямованості, що може проводити сканування в призначеному секторі. Прийняті сигнали після обробки у приймачі надходять на електроннопроменевий індикатор, у якого розгортка зображення синхронізована з переміщенням діаграми спрямованості антени. На екрані індикатора отримують картину теплового радіовипромінювання місцевості.
Крім того, пасивні РЛС використовуються для виявлення і визначення координат повітряно-космічних об'єктів, зокрема балістичних ракет на активній ділянці їх польоту, і кутових координат позаземних джерел радіовипромінювання. Останнє служить навігаційним цілям визначення широти і довготи точки розміщення РЛС.
Особливості пасивної радіолокації
На відміну від активної радіолокації, пасивна не дозволяє вирахувати дальність до цілі за даними приймання сигналів лише в одному пункті. Для повного визначення координат об'єкту необхідно спільне використання мінімум двох РЛС, які розгорнуті на певній (відомій) відстані одна від одної.
Види визначення координат цілі
Розрізняють 3 способи визначення координат об'єктів цілі за допомогою засобів пасивної радіолокації:
- кутомірний,
- різницево-далекомірний
- кутомірно-різницево-далекомірний.
Для вимірювання дальності в системах пасивної локації використовуються рознесені на місцевості системи прийому сигналів від об'єкту.
Кутомірний (триангуляційний) метод
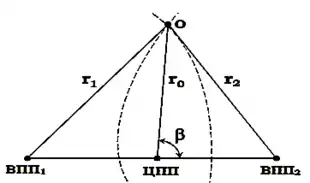
Кутомірний (триангуляційний) метод вимірювання координат об'єкта засновано на вимірюванні азимутів (мінімум двох) і кута місця в рознесених на відстань. Якщо об'єкт і обидві РЛС розташовані в горизонтальній (вертикальній) площині, досить знайти 2 азимута (2 кута місця), а визначення дальності здійснюється обчисленням трикутника. Для визначення координат об'єкту в загальному випадку необхідно виміряти не менше 3 кутових координат. На схемі:
- Б — база, тобто, відстань між пунктами прийому
- ЦПП — центральний пункт прийому, у якому вимірюється основний азимут β0 і кут місця έ0
- ВПП — винесений пункт прийому (друга РЛС), де міряють азимут на ціль β1
Визначення віддалі до об'єкта у цьому випадку визначається із системи рівнянь трикутників:
Різницево-далекомірний спосіб визначення координат
Різницево-далекомірний спосіб визначення координат передбачає вимір різниць відстаней від об'єкту випромінювання до трьох пасивних РЛС.
Для визначення координат об'єкту на площині потрібно визначити не менше двох значень різниці відстаней, для чого необхідно мати принаймні 3 рознесені РЛС. Цей метод вимірювання дозволяє виміряти як дальність до цілі, так і її кутові координати (без використання методів пеленгації). Система пасивної локації, в якій використовується даний метод вимірювання координат об'єкту, отримала назву базово-кореляційної системи (БКС). Найпростіша БКС складається з одного ЦПП і двох ВПП. В кожному ВПП здійснюється прийом, підсилення прийнятого сигналу і трансляція його із збереженням структури на ЦПП.
Для трансляції використовуються радіорелейні або тропосферні лінії зв'язку. В ЦПП також здійснюється прийом сигналу і обчислюються взаємно кореляційні функції сигналів прийнятих різними пунктами прийому, які необхідні для вимірювання різниці дальностей.
Постійну різницю дальностей до двох рознесених точок характеризує у двомірного випадку (на площині) гіпербола, а в тримірному випадку (у просторі)- гіперболоїд. Отже, постійно вимірювана величина (наприклад, Δr01 = r0 — r1) визначає в площині гіперболоїд, в одній з точок якого знаходиться ціль. Для вимірювання площинних координат достатньо виміряти ще одну різницю дальностей — Δr02. Координати цілі визначаються точкою перетину двох гіпербол, відповідних виміряним різницям відстаней, з фокусами в точках розташування РЛС.
Кутомірно-різницево-далекомірний спосіб
Кутомірно-різницево-далекомірний спосіб є комбінацією перших двох і полягає у визначенні напрямів і різниці відстаней від об'єкту до РЛС. При цьому способі треба мати не менше двох РЛС. Визначення площинних координат об'єкту забезпечується виміром однієї кутової координати і різниці відстаней.
Дальність дії пасивних РЛС при різко контрастних об'єктах може перевершувати дальність дії активних (випромінюючих) РЛС. Точності вимірювання кутових координат пасивними і активними РЛС приблизно однакові, точність визначення дальності у пасивних РЛС, зазвичай, нижче.
Література
- Малишкін Е. А., Пасивна: радіолокація, М., 1961
- Ніколаєв А. Г., Перцов С. В., Радіотеплолокація, М., 1964.
- О. А. Арнаутов, Р. В. Момот, Г. В. Худов Харківський університет Повітряних Сил ім. І. Кожедуба, Харків. Методи визначення координат об'єктів в системах пасивної локації
- Рябов Б. В. Новый облик радиолокации ПВО. www.vko.ru.
- Кучейко А. С орбиты видно всс // Независимое военное обозрение. — 2004. — № 7 (367).
- Саркисян А. Новые возможности наземных станций помех // Оборонные технологии. — 2003. — № 4.-С. 28-31.
- Aviation Week & Space Technology, Vol. 153, № 20, 13.11.2000.
- Полный «Триумф», www.vlasti.net.
- Jane's Dcfcnce Weekly, Vol.35, № 2, 10.01.2001.
- Коротков В., Мокссв Ю. «Кольчуга» Отечества. Журнал zbroya.com.ua.
- Сколник М. В. Введение в технику радиолокационных систем / М. В. Сколник. — М.: Мир, 1965. — 748 с.
- Иноземцев И. М. Характеристики обнаружения сигналов при диспергирующих пороговых уровнях / ИМ. Иноземцев, Л Д. Фельдман // Вопросы радиоэлектроники. -X: XIII. — 1962. -№ 10.-С. 11-17.
- Бугрова Л. М. Характеристики обнаружения пеленгационного канала РЛС при переменных пороговых уровнях / Л. М. Бугрова // Вопросы радиоэлектроники, XV. -1968. -№ 3.-С 32-37.
- Долгушин В. П. Метод підвищенняефективності (пропускноїспроможності) систем пеленгаціїджереї АІЛП на основіпросторово-кореляційного алгоритму обробки сигналів/ В. П. Долгушин, В. Б. Горшколепов, О. В. Мірошніченко // Збірник наук, праць Військового інституту Київського національного університету ім. Тараса Шевченка. — К.: ВІКНУ, 2006. — Вип. 2. — С 56-63.
- Долгушин В. П. Аналіз базово-коретяційного пеіен-гатора широкосмугових шумових перешкод / В. П. Долгушин, В. В. Вишнівський, В. Б. Бахвалов, О. В. Мірошніченко // Збірник наук, праць Військового інституту Київського національного університету ім. Тараса Шевченка. — К: ВІКНУ, 2006. — Вип. 3. — С. 16- 22; Оборона. — 2012. — N9 2.-С. 3-11.
- Голкин Д. В. Совместная байесовская оптимизация поиска и обнаружения объектов в радиолокационных системах / Д. В. Голкин, Г. В. Худов //Успехи современной радиоэлектроники. — М., 2003. — N9 11. — С. 23-32.
- Голкин Д. В. Совместная байесовская оптимизация поиска и обнаружения объектов в космических радиолокационных системах дистанционного зондирования-Земли /Д. В. Голкин, Г. В. Худов // Космічна наука і технологія. — К, 2003. — Т. 9. -N9 4.- С. 84-93.
- Лобанов М. М. Развитие советской радиолокационной техники / М. М. Лобанов. — М. : Воениздат, 1982.
- Розвиток радіолокаційних засобів ППО в роки Великої Вітчизняної війни. Короткий нарис / А. А. Гризо, I. М. Нсвмсржицький, В. М. Купрій, О. В. Тссленко // Наука і техніка Повітряних Сил Збройних Сил України. Науково-технічний журнал. — X. : ХУПС. — 2010. — Внп. 1(3). — С. 131—135.
- Справочник. Радиоэлектронные системы. Основы построения и теория / под ред. Я. Д. Ширмана. — М. : Радиотехника, 2007.
- Основы построения радиолокационного вооружения радиотехнических войск / под ред. В. В. Литвинова. — X. : ВИРТА ПВО, 1986.
- Пащенко Р. Е. Генерування та формування сигналів: навч. посіб. / Р. Е. Пащенко, I. В. Красношапка, Д. В. Максюта. — X. : ХУПС, 2011.
- Радіоелектронні системи: навч. посіб. / за ред. Ю. М. Ссдишсва. -X. :ХУПС, 2010.
- Приемно-передающие устройства радиотехнических систем. Ч. 2 / под ред. Ю. Н. Ссдишсва. — X. : ВИРТА ПВО, 1992.
- Цифрові пристрої та мікропроцесори. Ч. 1 : навч. посіб. / за ред. К. В. Садового. — X. : ХУПС, 2007.
- Основы построения РЛС РТВ / под ред. Б. Ф. Бондаренко. — К. : КВИРТУ ПВО, 1987.
- Озброєння та військова техніка РТВ. Побудова РЛС П-37 : навч. посіб. / за ред. В. I. Зверева. — X. : ХУПС, 2007.
- Озброєння та військова техніка РТВ. Побудова РЛС 19Ж6. Ч. 1 : навч. посіб. / ДА. Гриб, В. Й. Климченко, В. М. Купрій, та ін. — X. : ХУПС, 2006.
- Barton, David Knox. Radar system analysis and modeling . — Nordwood, ARTECH HOUS, IN., 2005.
- Багдасарян С. T. Радіолокаційна системотехніка / С. Т. Багдасарян, Ю. В. Кулявсць. С. І. Шипшин. — X. : ХВУ, 2002.
- Озброєння радіотехнічних підрозділів і частин ППО. Наземний радіолокаційний запитувач НРЗ-П: навч. посіб. / О. С. Матяренко, П. В. Овсянніков, С. П. Володько та ін. — X. : ХВУ, 2003.
Див. також
Посилання
- Термолокація // Універсальний словник-енциклопедія. — 4-те вид. — К. : Тека, 2006.
- zahysnippo.ru/funkcionirovanie_sistemi_obnaruzhen.html — Функціонування системи виявлення (ППО)
- repository.hneu.edu.ua/jspui/bitstream/123456789/10414/1/Конспект_Лекцій_ОП_РЛЗ_РПП.pdf — Основи побудови радіолокаційних засобів розвідки повітряного простору: конспект лекцій / К. С. Васюта, О. В. Тесленко, В. М. Купрій, О. А. Малишев. Х. : ХУПС, 2013. – 212 с.
- mybiblioteka.su/3-29583.html — Загальна характеристика та склад апаратури РЛС 19Ж6 (П-37)
- mybiblioteka.su/3-29580.html — Білети по дисципліні Радіотехнічні війська ППО та відповіді на них