Вторинні вимірювальні прилади
Основне призначення вимірювальних приладів — візуальний показ контрольованого параметра, реєстрація його значення на різних носіях, вироблення сигналу поточного значення для системи регулювання. Деякі вторинні прилади містять контактну групу для сигналізації граничних значень параметра та інтегратор.
Втори́нні вимі́рювальні при́лади
Класифікація
Вимірювальні прилади класифікуються за декількома ознаками:
- — за видом подання результатів вимірювання — аналогові (безперервні) і цифрові (дискретні);
- — за видом структурної схеми — прилади прямого вимірювання і прилади, що працюють за принципом компенсації;
- — за видом енергії, що використовується — електричні, пневматичні і гідравлічні прилади.
Основні риси аналогових приладів прямого вимірювання — малопотужний вихідний сигнал, здатний перемістити тільки стрілку відносно шкали, і відсутність зворотного зв'язку. Приклади таких приладів — логометри, вольтметри, амперметри тощо.
Найбільше промислове поширення отримали електричні вимірювальні прилади, які працюють за компенсаційним принципом з відповідними перетворювачами: з диференційно-трансформаторною і феродинамічною вимірювальними схемами; з автоматичними мостовими схемами (мости змінного струму і потенціометри). Дані прилади часто називають вторинними приладами.
Принцип дії
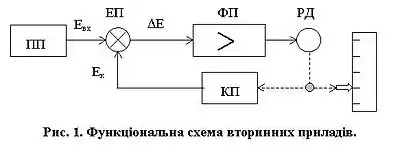
Дія автоматичних вторинних приладів (рис. 1) заснована на компенсаційному принципі. Вимірювана величина, яка формується за допомогою первинного перетворювача (ПП) і передається на прилад у вигляді сигналу Евх, компенсується протифазним сигналом Ек, який утворюється в самому приладі за допомогою зворотного зв'язку, реалізованого за допомогою компенсаційного перетворювача (КП).
Робота приладів проста, розглянемо її детальніше, оскільки вона справедлива для всіх видів вторинних компенсаційних приладів.
У початковому стаціонарному стані величини сигналів Евх = Ек, тобто ΔЕ = 0, оскільки сигнали знаходяться у протифазі. Ротор двигуна нерухомий. При зміні вхідного сигналу на елементі порівняння виникає розузгодження ΔЕ, яке після підсилення управляє роботою двигуна. Останній в залежності від фази сигналу переміщує робочий елемент компенсаційного перетворювача в ту або іншу сторону доти, поки не настане рівність сигналів Евх = Ек. Сигнал, що керує двигуном, зникає, ротор РД і показуюча стрілка приладу зупиняється в новому положенні, фіксуючи нове значення контрольованого параметра.
Вторинні прилади випускаються з метою прямого показування результатів вимірювань і їх фіксації самописцями. Такі прилади можуть обладнуватися одним або декількома додатковими пристроями: контактними групами, що використовуються для сигналізації або найпростішого релейного регулювання, перетворювачами переміщення для передачі інформації на додатковий вторинний прилад або на регулятор, інтеграторами (лічильниками). Деякі прилади мають вбудовані пневматичні регулятори.
У динамічному відношенні вторинні прилади можна розглядати як аперіодичні ланки першого порядку, а у разі аналізу систем регулювання з інерційним об’єктом їх можна приймати за підсилювальну ланку. Для реалізації вказаного принципу автоматичні вторинні прилади містять вимірювальну схему, елемент порівняння (ЕП), фазочутливий підсилювач (ФП), реверсивний двигун (РД), компенсаційний перетворювач (КП) і систему реєстрації показань (стрілка, записуючий пристрій, шкала).
Див. також
Література
- Папушин Ю. Л., Білецький В. С. Основи автоматизації гірничого виробництва. — Донецьк : Східний видавничий дім, 2007. — 168 с. — ISBN 978-966-317-004-6.
- Іванов А. О. Теорія автоматичного керування: Підручник. — Дніпропетровськ: Національний гірничий університет. — 2003. — 250 с.
- Енциклопедія кібернетики. тт. 1, 2. — К.: Головна редакція УРЕ, 1973. — 584 с.