Електроактивні полімери
Електроактивні полімери (ЕАП) — полімери, що змінюють форму при прикладанні до них електричної напруги. Вони можуть використовуватися як двигуни, так і як сенсори. Як двигуни вони можуть значно деформуватися, в той же час розвиваючи значне зусилля.
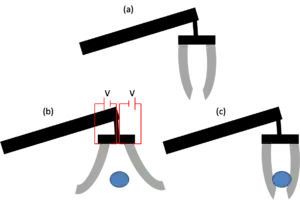
Принцип роботи ЕАП захвату. (B) При поданні напруги ЕАП пластини розходяться і захват можна підвести до об'єкта. (C) При знятті напруги ЕАП пластини приймають первісну форму і утримують об'єкт
Завдяки схожості з живими м'язами за розвиваним зусиллям, їх часто називають штучними м'язами.
Електроактивні полімери використовуються в робототехніці як лінійні приводи.
Класифікація
ЕАП можна розділити на два класи:
- Діелектричні ЕАП (діелектричні еластомери) — в них зусилля виникає в результаті електростатичних сил, що виникають між електродами і стискають полімер. Діелектричні еластомери здатні витримувати дуже високі напруги і фактично являють собою конденсатор, який змінює свою ємність, при прикладанні електричної напруги, дозволяючи полімеру тоншати, збільшуючи при цьому площу під дією електричного поля. Цей тип ЕАП вимагає високої напруженості електричного поля (і відповідно високої напруги — сотні і навіть тисячі вольт), проте відрізняються низьким енергоспоживанням. Діелектричні ЕАП не споживають енергію для збереження заданого положення.
- Іонні ЕАП, в яких зусилля виникає через зміщення іонів у полімері. Робочі напруги іонних ЕАП — одиниці вольт, але необхідність підтримки потоку іонів приводить до більшого енергоспоживання, крім того, для підтримки заданого положення необхідна постійна витрата енергії.
Див. також
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.