Зворотне поширення в часі
Зворо́тне поши́рення в ча́сі (ЗПЧ, англ. Backpropagation through time, BPTT) — це методика на основі градієнту для тренування певних типів рекурентних нейронних мереж. Її можна застосовувати для тренування мереж Елмана. Цей алгоритм було незалежно виведено численними дослідниками.[1][2][3]
Алгоритм
Тренувальні данні для ЗПЧ повинні бути впорядкованою послідовністю пар входів-виходів, . Для мусить бути вказано початкове значення. Для цієї мети зазвичай застосовують вектор з усіх нулів.


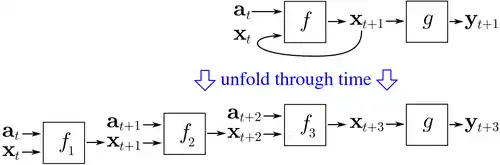
ЗПЧ починається з розгортання рекурентної нейронної мережі в часі, як показано на цьому зображенні. Ця рекурентна нейронна мережа містить дві нейронні мережі прямого поширення, f та g. Коли ця мережа розгортається в часі, то розгорнута мережа містить k примірників f, і один примірник g. У наведеному прикладі мережу було розгорнуто до глибини k = 3.
Потім тренування відбувається подібним чином, як і при тренуванні нейронної мережі прямого поширення зворотним поширенням, за тим виключенням, що тренувальні зразки відвідуються послідовно. Кожен тренувальний зразок складається з . (Всі дії для k моментів часу потрібні тому, що розгорнута мережа містить входи на кожному з розгорнутих рівнів.) Після представлення зразка для тренування уточнення ваг у кожному з примірників f () підсумовуються, і потім застосовуються до всіх примірників f. Як початкове значення , як правило, використовують нульовий вектор.



Псевдокод
Псевдокод ЗПЧ:
Зворотне_поширення_в_часі(a, y) // a[t] є входом у момент часу t. y[t] є виходом
Розгорнути мережу, щоби містила k примірників f
повторювати до досягнення критерію зупинки:
x = вектор нульової величини; // x є поточним контекстом
для t від 0 до n - k // t є часом. n є довжиною тренувальної послідовності
Встановити входи мережі в x, a[t], a[t+1], ..., a[t+k-1]
p = поширити входи в прямому напрямку всією розгорнутою мережею
e = y[t+k] - p; // похибка = ціль - передбачення
Поширити в зворотному напрямку похибку e всією розгорнутою мережею
Підбити загальну суму змін ваг у k примірниках f.
Уточнити всі ваги в f та g.
x = f(x, a[t]); // обчислити контекст для наступного моменту часу
Переваги
ЗВЧ має схильність бути значно швидшим для тренування рекурентних нейронних мереж, ніж методики оптимізації загального призначення, такі як еволюційна оптимізація.[4]
Недоліки
ЗВЧ зазнає труднощів з локальними оптимумами. В рекурентних нейронних мережах локальний оптимум є набагато значнішою проблемою, ніж у нейронних мережах прямого поширення.[5] Рекурентний зворотний зв'язок у таких мережах має схильність створювати хаотичні реакції в поверхні похибки, в результаті чого локальні оптимуми виникають часто, і в дуже поганих місцях поверхні похибки.
Див. також
Примітки
- Mozer, M. C. (1995). A Focused Backpropagation Algorithm for Temporal Pattern Recognition. У Y. Chauvin; D. Rumelhart. Backpropagation: Theory, architectures, and applications. Hillsdale, NJ: Lawrence Erlbaum Associates. с. 137–169. (англ.)
- Robinson, A. J. & Fallside, F. (1987). The utility driven dynamic error propagation network (CUED/F-INFENG/TR.1). Проігноровано невідомий параметр
|institution=(довідка) (англ.) - Paul J. Werbos (1988). Generalization of backpropagation with application to a recurrent gas market model. Neural Networks 1 (4): 339–356. doi:10.1016/0893-6080(88)90007-X. (англ.)
- Jonas Sjöberg and Qinghua Zhang and Lennart Ljung and Albert Benveniste and Bernard Deylon and Pierre-yves Glorennec and Hakan Hjalmarsson and Anatoli Juditsky (1995). Nonlinear Black-Box Modeling in System Identification: a Unified Overview. Automatica 31: 1691–1724. doi:10.1016/0005-1098(95)00120-8. (англ.)
- M.P. Cuéllar and M. Delgado and M.C. Pegalajar (2006). An Application of Non-linear Programming to Train Recurrent Neural Networks in Time Series Prediction Problems. Enterprise Information Systems VII (Springer Netherlands): 95–102. ISBN 978-1-4020-5323-8. doi:10.1007/978-1-4020-5347-4\_11. (англ.)