Колесо Ілона
Ко́лесо І́лона або шве́дське ко́лесо (англ. Ilon’s wheel, Swedish wheel, Mecanum wheel) — колесо з рівномірно розподіленими по ободу роликами, через які відбувається взаємодія колеса із поверхнею переміщення. Таке колесо дає змогу транспортному засобу шляхом незалежного приведення у рух своїх коліс забезпечити контрольоване переміщення у будь-якому напрямку.


Шведське колесо, винайшов у 1973 році[1] інженер шведської компанії «Mecanum AB» Бенгт Ілон (швед. Bengt Erland Ilon), на яке у 1975 році він отримав патент США[2] — звідки й пішли варіанти назви колеса. Конструкція таких коліс дає змогу транспортному засобу рухатись убік чи обертатись на місці при мінімальній силі тертя й, відповідно, малому крутному моменті на двигунах приводу.
Будова та принцип роботи
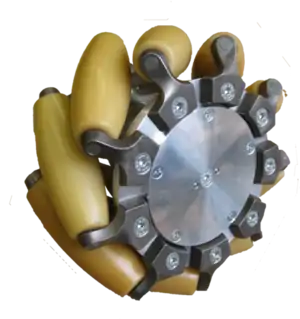
Конструкція виконана у вигляді колеса, на якому змонтовано декілька роликів, розподілених рівномірно по зовнішньому колу периметра колеса. Кут осі обертання роликів становить 45° до осі колеса. Ролики, що прикріплені по колу, є пасивними а для передавання енергії у рушій служить основна вісь.
Таке колесо характеризується трьома ступенями вільності: обертання навколо (моторизованої) колісної осі; обертання роликів; обертання навколо точки контакту ролика з поверхнею.
Шляхом зміни швидкості та напряму обертання кожного з коліс, урухомлення кожного з яких забезпечується окремим двигуном, можна заставити транспорт, оснащений такими колесами, рухатись у будь-якому напрямку — не лише вперед-назад, праворуч-ліворуч але і діагонально.
Переваги та недоліки
Головною перевагою є те, що, хоча обертання колеса від привода здійснюється навколо однієї осі, воно може рухатись з невеликим тертям у різних напрямах. Відпадає потреба у механізмі повороту коліс для зміни напряму руху. Шведське колесо можна віднести до типу всенаправлених коліс (англ. omni wheel).
Хоча гусеничний рушій використовує схожий метод для повертання, одна при цьому він може суттєво пошкодити поверхню, якою він переміщається. До того ж для подолання сил тертя при повертанні вимагаються значні крутні моменти.
Недоліком коліс Ілона є швидке зношування, складність конструкції, відносно невеликі швидкості переміщення.
Застосування
У 1980-х роках ВМС США зацікавились проектом й викупили патент в Ілона. На військових кораблях апарати, оснащені такими колесами, застосовувались для переміщення вантажів в обмеженому просторі.
У 1997 році компанія «Airtrax Incorporated» та декілька інших компаній кожна заплатили ВМС США по 2500 доларів для того, щоб купити права на технологію, включно із старими креслениками та описами принципу роботи програмного забезпечення мікроконтролерів для керування двигунами. На основі придбаних матеріалів вони створили вилковий навантажувач, який міг би легко переміщатись в обмеженому просторі, як от, наприклад, палуба авіаносця. Такого роду транспорт уже виробляється.
Зазвичай використовується конфігурація, на базі 4-х коліс (наприклад, робот «URANUS», що здатний переміщатись в усіх напрямах).
Див. також
Примітки
- Improved Mecanum Wheel Design for Omni-Directional Robots. Institute of Technology and Engineering, Massey University. November 2002. Процитовано 22 вересня 2011.
- Bengt Erland Ilon US Patent № 3876255 Wheels for a course stable selfpropelling vehicle movable in any desired direction on the ground or some other base April 8, 1975.
Джерела
- Sanket Soni, Trilok Mistry and Jayesh Hanath Experimental Analysis of Mecanum wheel and Omni wheel // IJISET — International Journal of Innovative Science, Engineering & Technology, Vol. 1 Issue 3, May 2014. — P.291-295. — ISSN 2348 -7968.
Посилання
- Patents / Killough platform // Innovative wheels (англ.).
- Демонстрація можливостей роботизованого мезанізму на колесах Ілона.
- Навантажувач на колесах Ілона у дії.