Робот
Ро́бот (від чеськ. robota) — автоматичний пристрій, що призначений для виконання виробничих та інших операцій, які зазвичай виконувались безпосередньо людиною. Для опису автоматичних пристроїв дія яких не має зовнішньої схожості з діями людини, переважно використовується термін «автомат».

У більшості випадків сучасні роботи промислового призначення — це «руки», маніпулятори, закріплені на основі і призначені для виконання одноманітної роботи на зразок складання, переміщення та інше. До роботів також належать мобільні пристрої, що працюють у небезпечних для людини середовищах і керовані дистанційно, наприклад роботи, котрі працюють на великих водних глибинах, у космосі, пристрої військового призначення (ведення розвідки, розмінування, доправлення боєприпасів тощо) та інше, а також роботизовані іграшки.
Робот може втілюватися як керований системою керування електромеханічний, пневматичний, гідравлічний пристрій або їх поєднання, основне призначення якого — заміна людини на виробництві, небезпечних чи шкідливих середовищах, побуті тощо.
Робот може безпосередньо виконувати команди оператора, може працювати за заздалегідь складеною програмою або дотримуватись набору загальних вказівок з використанням технології штучного інтелекту. Ці завдання дозволяють полегшити або зовсім замінити людську працю на виробництві, в будівництві, при роботі з важкими вантажами, шкідливими матеріалами, а також в інших важких або небезпечних для людини умовах.
Окремий вид роботів — нанороботи. Це роботи, розміром зіставні з молекулою (менше 10 нм), що мають здатність руху, обробки і передавання інформації, виконання програм. Нанороботи, які спроможні до створення власних копій, тобто самовідтворення, називаються реплікаторами[2]. Наноробототехніка перебуває на науково-технічній стадії розвитку з перспективою застосування у медицині, генній інженерії та інших галузях.
Походження терміну

Прийнятий зараз у всьому світі термін був запропонований чеським письменником Карелом Чапеком та його братом Йозефом і вперше використаний у 1921 в п'єсі К.Чапека «Р. У. Р.» (чеськ. R.U.R.; скорочення від чеськ. Rossumovi univerzální roboti). Так він назвав штучних істот, які зовні нагадували людей.
Спочатку для означення такого типу технічних об'єктів було використане слово похідне від латинського «labor» (робота), але потім Карел Чапек прислухався до поради свого брата Йозефа й зупинився на похідній від чеського «robota»[3]. Чеською слово означало «важка робота», «каторжна робота». Це цілком відповідало змістові п'єси, у якій роботи виконували замість людей усю найважчу або рутинну працю.
Упродовж декількох наступних років п'єсу поставили у більшості великих міст світу. К.Чапек отримав славу та статки. А слово «робот» увійшло до словників багатьох мов.
1928-го в першому виданні «Оксфордського словника англійської мови» при слові «робот» зазначалося, що його створив автор п'єси «Р. У. Р.» Карел Чапек. Той одразу спростував інформацію — вказав, що насправді творцем слова є його брат Йозеф[4].
Термін «робототехніка» увів Айзек Азімов в оповіданні «Брехун» («Liar!») у 1941. Він, також є автором трьох законів робототехніки («Я, робот»; 1941):
- Робот не може заподіяти шкоду людині, або своєю бездіяльністю дозволити, щоб людині була заподіяна шкода.
- Робот повинен підкорятися наказам людини, за винятком тих, котрі суперечать першому пункту.
- Робот повинен захищати самого себе, якщо тільки його дії не суперечать першому і другому пунктам.
Функціональна схема робота
У складі робота є механічна частина і система управління цією механічною частиною, яка у свою чергу отримує сигнали від сенсорної частини. Механічна частина робота ділиться на маніпуляційну систему і систему пересування.
Маніпуляційна система роботів

Маніпулятори для роботів — це аналог рук людини.
Маніпулятори включають рухомі ланки двох типів:
- ланки, що забезпечують поступальний рух;
- ланки, що забезпечують кутові (повертальні) переміщення.
Поєднання і взаємне розташування ланок визначає кількість ступенів вільності, а також область дії маніпуляційної системи робота.
Для забезпечення руху в ланках можуть використовуватися електричний, гідравлічний або пневматичний привод.
Частиною маніпуляторів (хоч і необов'язковою) є захоплювальні пристрої. Найуніверсальнішими такими пристроями є пристрої-аналоги руки людини, у яких захоплення здійснюється за допомогою механічних «пальців». Для захоплення плоских предметів використовуються захоплювачі з пневматичним присмоктуванням. Для захоплення ж множини однотипних деталей (що зазвичай і відбувається при застосуванні роботів в промисловості) застосовують спеціалізовані конструкції.
Замість захоплювальних пристроїв маніпулятор може бути оснащений робочим інструментом. Це може бути пульверизатор, зварювальна головка, викрутка тощо.
Система пересування роботів
Для пересування по відкритій місцевості найчастіше використовують колісну або гусеничну, рідше — крокувальну систему пересування роботів. Це найуніверсальніші види систем переміщення.

Для нерівних поверхонь створюються гібридні конструкції, що поєднують колісний або гусеничний хід з складною кінематикою руху коліс. Така конструкція була застосована в місяцеході.
Усередині приміщень, на промислових об'єктах використовуються пересування уздовж монорельсів, по підлоговій колії тощо.
Для переміщення по похилих, вертикальних площинах використовуються системи подібні «крокувальним» конструкціям, але з пневматичними присосками.
Система керування роботами
Системи керування робототехнічними пристроями будуються на тому самому технічному базисі, що і всі інші автоматичні пристрої. Алгоритми систем керування роботами вивчаються у курсах теорії автоматичного керування, теоретичної механіки. Звичайно це лише найзагальніші курси, для глибшого вивчення рекомендується теорія навігаційних систем, наближена теорія гіроскопів, електротехніка, цифрова та аналогова схемотехніка та інше.
У сучасному світі, коли переважною течією є конвергенція технологій та наук, у керуванні роботами цікавих результатів досягають застосуванням знань людства з біології та моделей поведінки тварин.
Загальновизнаним є поділ методів керування на: програмне керування, адаптивне керування, інтелектуальне керування, напівавтоматичне або телекерування — тобто за участі людини.
Програмне керування
Програмне керування — найпростіший тип системи керування, використовується для управління маніпуляторами на промислових об'єктах. У таких роботах відсутня сенсорна частина, всі дії жорстко фіксовані і регулярно повторюються.
Адаптивне керування
Роботи з адаптивною системою керування оснащені сенсорною частиною. Сигнали, що передаються сенсорами, аналізуються і залежно від результатів ухвалюється рішення про подальші дії, перехід до наступної стадії дій тощо.
Інтелектуальне керування
Інтелектуальний спосіб керування заснований на методах штучного інтелекту. Серед яких можна виділити, як найпоширеніші — нечітку логіку та нейронні мережі.
Управління за участі людини
Управління роботом людиною за допомогою дистанційних систем керування. Прикладом такого робота є апарат для розмінування з дистанційним керуванням.
Огляд
Сучасні роботи функціюють на основі принципів зворотного зв'язку, підлеглого управління і ієрархічності системи управління роботом.
Ієрархія системи управління роботом має на увазі ділення системи управління на горизонтальні шари, що управляють загальною поведінкою робота, розрахунком необхідної траєкторії руху маніпулятора, поведінкою окремих його приводів, і шари, що безпосередньо здійснюють управління двигунами приводів.
Концепція підлеглого управління служить для побудови системи управління приводом. Сенс концепції такий: Хай необхідно побудувати систему управління приводом по положенню (наприклад, по куту повороту ланки маніпулятора). Система замикається зворотним зв'язком по положенню, а усередині системи управління по положенню функціонує система управління за швидкістю з своїм зворотним зв'язком за швидкістю, усередині якої існує контур управління по струму з своїм зворотним зв'язком.
Сучасний робот оснащений не тільки зворотними зв'язками по положенню, швидкості і прискоренням ланок. При захопленні деталей робот повинен знати, чи вдало він захопив деталь. Якщо деталь крихка або її поверхня має високий ступінь чистоти, будуються складні системи із зворотним зв'язком по зусиллю, що дозволяють роботові схоплювати деталь, не ушкоджуючи її поверхню і не руйнуючи її.
Управління роботом може здійснюватися як людиною-оператором, так і системою управління промисловим підприємством (ERP-системою), що погоджують дії робота з готовністю заготовок і верстатів з ЧПК до виконання технологічних операцій.
Серед найпоширеніших дій, що здійснюються промисловими роботами можна назвати такі:
- переміщення деталей і заготовок від верстата до верстата або від верстата до систем змінних палет;
- шовне та точкове зварювання;
- фарбування;
- виконання операцій різання з рухом інструменту по складній траєкторії.
Промисловий робот є пристроєм, що проводить якісь маніпулятивні функції, схожі з функціями руки людини.
«Робот» взагалі — поняття невизначене, і тому до класу роботів можна віднести багато автоматичних пристроїв.
Промислові роботи є важливими компонентами автоматизованих гнучких виробничих систем, які дозволяють збільшити продуктивність праці. На жаль, повну і економічно виправдану автоматизацію виробництв ще не досягнуто.
Роботи, що працюють в спеціальних умовах (висока радіація, тиск, температура, підводний світ, космос) дозволяють, не ризикуючи життям людей, здійснювати різні операції як дослідницького, так і рятувального і антитерористичного характеру.
Історія
Ідея штучних істот вперше згадується в старогрецькому міфі про Кадма, який, убивши дракона, розкидав його зуби по землі і заорав їх, із зубів виросли солдати, та в іншому старогрецькому міфі про Пігмаліона, який вдихнув життя в створену ним статую, Галатею. Також в міфі про Гефеста розповідається, як він створив собі різних слуг. Староєврейський міф розповідає про Голема, який був оживлений кабалістичною магією.
Схожий міф розповідається в скандинавському епосі Молодша Едда. Там розповідається про глиняного гіганта Місткалфе, створеного тролем Рунгнером для сутички з Тором, богом грому.
Перше креслення людиноподібного робота було зроблене Леонардо да Вінчі близько 1495 року. Записи Леонардо, знайдені в 1950-х, містили детальні креслення механічного лицаря, здатного сидіти, розводити руки, рухати головою і відкривати забрало. Дизайн швидше за все заснований на анатомічних дослідженнях, записаних у Вітрувіанській людині. Невідомо, чи намагався Леонардо побудувати робота.
Першого діючого робота — андроїда, що грає на флейті, — створив в 1738 році французький механік і винахідник Жак де Вокансон. Він також виготовив механічних качок, які, як то кажуть, вміли клювати корм і випорожнюватися.
У 1969 році був створений перший робот, який здатний самостійно функціонувати та оцінювати власні дії — Робот Шекі. З розвитком технології люди все частіше бачили в механічних істотах щось більше, ніж просто іграшки. Література відобразила страхи людства, що люди можуть бути замінені своїми власними творіннями. Роман «Франкенштейн, або Сучасний Прометей» (1818) іноді називають першим науково-фантастичним твором, що втілює цю проблему. Пізніше Карел Чапек пише знамениту п'єсу «R.U.R.», у якій представлена ідея складальної лінії, на якій роботи збирають самих себе, твір мав економічний і філософський підтексти. Надалі ці ідеї розвиваються в фільмах «Метрополіс» (1927), «Той, що біжить по лезу бритви» (1982) і «Термінатор» (1984). Як роботи з штучним інтелектом стають реальністю і взаємодіють з людиною, показано у фільмах «Штучний розум» (2001) режисера Стівена Спілберга і «Я, робот» (2004) режисера Алекса Пройяса.
У 1981 році Кензі Урада, робітник заводу «Kawasaki» став першою офіційною жертвою, що загинула від руки робота. З того часу число жертв роботів зростає, не зважаючи на впровадження вдосконалених механізмів безпеки.
Одним з перших прикладів вдалої масової промислової реалізації побутових роботів стала механічна собачка «Aibo» корпорації «Sony».
Роботи сьогодні
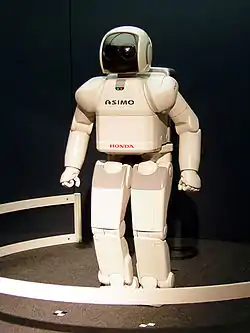
Робот-гуманоїд
Робот-гуманоїд (людиноподібний робот) — це машина, шасі (ходова частина) якої виконано у вигляді людиноподібного тіла. Гуманоїдний дизайн робота зумовлений певною метою: функціональністю — для використання людських інструментів чи середовищ життя людини; з експериментальною метою — для вивчення прямоходіння; з медичною метою — вивчення впливу на організм тих чи інших навантажень тощо. Загалом, людиноподібні роботи мають тулуб, голову, дві руки і дві ноги; хоча деякі види людиноподібних роботів можуть моделювати тільки частину тіла, наприклад, від голови — до пояса. Деякі людиноподібні роботи можуть мати голову, призначену для реплікації людських рис обличчя (таких, як очі і рот тощо).
У вересні 2005 у вільний продаж вперше поступили перші людиноподібні роботи «Вакамару» виробництва фірми Mitsubishi. Робот вартістю $15 тис. здатний впізнавати особи, розуміти деякі фрази, давати довідки, виконувати деякі секретарські функції, стежити за приміщенням.
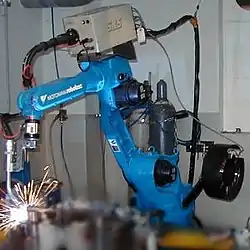
Індустріальний робот
Промислові (індустріальні) роботи в останні десятиріччя майже повністю замінили людську працю в різноманітних галузях, особливо в технологічних процесах, де потрібна прецизійна точність, швидкість та одноманітність, повторюваність операцій — в машинобудуванні та обробці матеріалів, у виробництві мікропроцесорів і навіть в таких технологіях як виробництво або складання паперово-картонної тари.
Сільськогосподарський робот

Сільськогосподарський робот або агроробот — робот, який використовується у сільськогосподарських цілях.
Основна область застосування роботів у сільському господарстві — процес збирання врожаю. Роботи, що збирають овочі або фрукти; трактор-розпилювач, що працює автономно; робот, який стриже овець, призначені для заміни людської праці у цій галузі. Індустрія сільського господарства відстає у використанні роботів від інших галузей, так як види робіт, пов'язані з сільським господарством, не є однозначними, і навіть часто повторювані дії кожного разу не завжди збігаються. У більшості випадків певна множина факторів (наприклад, розмір і колір плодів) повинна аналізуватись до початку виконання завдання. Роботи можуть бути використані при вирішенні таких рослинницьких задач, як обрізання, прополювання, оранка, поливання, моніторинг перебігу процесу вирощування тощо. У тваринництві роботи знайшли застосування для доїння, миття, кастрації тощо.
Побутовий робот

Побутовий робот — робот, призначений для допомоги людині в повсякденному житті. Наразі поширення побутових роботів є невеликим, проте футурологи передбачають широке їх використання у найближчому майбутньому[5].
Відомі такі комерційні моделі побутових роботів:
- роботи-іграшки;
- соціальні роботи, які автономному чи напівавтономному режимі можуть взаємодіяти та спілкуватись з людьми;
- роботи-помічники, наприклад:
- роботи-прибиральники (робот-пилосос, робот для миття підлоги[6] тощо)
- роботизовані газонокосарки[7];
- роботи для чищення басейнів[8], каналізаційних труб тощо.
Військовий робот

Дослідний Центр Військово-морського флоту США опублікував концепцію використання бойових роботів[9] На відміну від попередніх документів такого роду, що готуються з 1960-х років, у цьому вперше запропоновано кардинально новий принцип: машини повинні знищувати тільки інші машини.
У документі, що називається Концепція Операцій Збройних Автономних Систем підкреслюється, що за нинішніх умов головним завданням армій є не виграш війни, а виграш миру. У цих умовах украй небезпечно використовувати бойову техніку, що апріорі небезпечна для мирного населення. Знищення мирних жителів у ході легітимних воєнних операцій є практично неминучим. Небезпека убивства безневинних зростає у разі, якщо в бій йдуть бойові роботи, не здатні відрізнити, наприклад, бойовика з вибуховим пристроєм у руці від жінки з відром.
Виходячи з цього, автори концепції пропонують від самого початку налаштовував роботів на боротьбу не з носіями зброї, а із самою зброєю. Наприклад, з появою супротивника, озброєного автоматом, робот повинен цілитися не в людину, а в автомат. Якщо при цьому буде убито або поранено ворожого солдата чи повстанця, подібні огріхи можна буде розцінювати, як нестрашну помилку.
Автономний робот
Автономні роботи — це роботи, які здатні виконувати потрібні завдання без постійного людського нагляду. Багато видів роботів мають певний ступінь автономності. Різні роботи можуть бути автономними у різні способи. Високий ступінь автономності особливо бажаний у таких царинах, як наприклад: дослідження космосу, прибирання підлоги, покіс газонів і очищення стічних вод.
Багато сучасних промислових роботів є «автономними» в суворо визначених межах їх безпосереднього застосування.
Відомі виробники роботів
Існують компанії, що спеціалізуються на виробництві роботів (серед найбільших — iRobot Corporation). Роботів також розробляють та випускають деякі компанії, що працюють у галузі високих технологій: ABB, Honda, Mitsubishi, Sony, World Demanded Electronic, Gostai, KUKA.
Проводяться виставки роботів, наприклад найбільша у світі iRex (англ. International robot exhibition; проводиться на початку листопада один раз на два роки в Токіо, Японія)[10].
РТ M15-робот-трансформер
ІР М15- призначений на різні роботи в різних місцевостях
БР М15-з новітньою зброєю, з необхідним обладнанням
Див. також
- Робототехніка
- Автоматизація
- HRP-4C японський робот-модель
- 15907 Робот — астероїд, названий на честь роботів[11].
- Наноробот
- Андроїд
- Нанотехнології
- Людино-машинна взаємодія
- Мехатроніка
- Айзек Азімов
- Всеукраїнський фестиваль робототехніки Robotica
Примітки
- Four-legged Robot, 'Cheetah,' Sets New Speed Record. Reuters. 2012-03-06.
- Э.Дрекслер Машины созидания: грядущая эра нанотехнологии. Anchor Books, 1986. — ISBN 0-385-19973-2
- Владимир Парамонов Термину «робот» исполнилось 85 лет (рос.)
- Лєра Лауда Слово «робот» з'явилося 90 років тому на сайті «Gazeta.ua»
- Bill Gates A Robot in Every Home // Scientific Fmerican, January 2007. (англ.)
- iRobot Scooba. Floor washing robot. User manual (англ.)
- Павел Котов Роботизированная газонокосилка Bosch Indego на сайті «3Dnews» (рос.)
- iRobot Launches Verro Pool Cleaning Robots! (англ.)
- Військові роботи будуть знищувати тільки собі подібних на сайті «КоерреспонденТ.net»
- INTERNATIONAL ROBOT EXHIBITION
- База даних малих космічних тіл JPL: Робот (англ.).
Джерела
- Робототехніка: підруч. для студ. вищ. навч. закл., що вивчають дисципліну «Робототехніка і мехатроніка» / В. І. Костюк, Г. О. Спину [та ін.]. — Київ: Вища школа, 1994. — 446, [1] с. — ISBN 5-11-004067-2
- Воротников С. А. Информационные устройства робототехнических систем: учебное пособие. — М.: Изд-во МГТУ им. Н. Э. Баумана, 2005. — 384 с. — ISBN 5-7038-2207-6
- Юревич Е. И. Основы робототехники [Текст]: учеб. пособие для вузов по направл. подгот. дипломир. спец. 652000 «Мехатроника и робототехника» (спец. 210300 «Роботы и робототехн. системы»). — 2-е изд. — СПб. : БХВ-Петербург, 2005. — 401 с. — ISBN 5-94157-473-8
Посилання
- Візуальне керування рухомим об'єктом (стаття)[недоступне посилання з липня 2019]
- Роботи, фантастика, ретрофутуризм
- Ірина Когут. РОБОТИ І РОБІТНИКИ: ХТО ПОВСТАНЕ ПЕРШИМ?
- Robotics Portal Портал з робототехніки. (англ.) (італ.)
- Дослідження
- International Foundation of Robotics Research (IFRR) (англ.)
- International Journal of Robotics Research (IJRR) (англ.)
- Robotics and Automation Society (RAS) на сайті IEEE (англ.)
- Robotics Division на сайті NASA (англ.)
- Human Machine Integration Laboratory на сайті Університету штату Аризона (англ.)
- Valkyrie: NASA's Superhero Robot (відеоролик на YouTube про робота «Валькірія») (англ.)
- Journal of Field Robotics[недоступне посилання з квітня 2019] (англ.)
- Навчання
- Robotics Certification на сайті Коледжу Джорджа Брауна (англ.)
- Field and Space Robotics на сайті Массачусетського технологічного інституту (англ.)
- Robotics Institute на сайті Університету Карнегі-Меллон (англ.)
