Кінематична пара
Кінемати́чна па́ра — рухоме сполучення двох жорстких (твердих) ланок, що накладає обмеження на їх відносний рух умовами накладеної в'язі. Кожна з умов в'язі усуває один ступінь свободи, тобто можливість одного з 6 незалежних відносних рухів у просторі. В прямокутній системі координат можливі 3 поступальних рухи (в напрямку 3-х осей координат) і 3 обертальних (навколо цих осей).
Класифікація кінематичних пар
За числом умов в'язей S у теорії машин і механізмів кінематичні пари поділяються на 5 класів. Число ступенів свободи кінематичної пари W = 6 — S. У кожному класі кінематичні пари поділяються на види за можливими видами відносного руху ланок.
За видом контакту між ланками кінематичні пари поділяються на:
- вищі (контакт у точці або по лінії);
- нижчі (контакт по поверхні).
| Клас | Число в'язей |
Число ступенів свободи |
I вид | II вид | III вид | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| p1 | число рухів | обертальних | поступальних | ||||||||
| вільних | |||||||||||
| зафіксованих | |||||||||||
| p2 | число рухів | обертальних | поступальних | число рухів | обертальних | поступальних | |||||
| вільних | вільних | ||||||||||
| зафіксованих | зафіксованих | ||||||||||
| p3 | число рухів | обертальних | поступальних | число рухів | обертальних | поступальних | число рухів | обертальних | поступальних | ||
| вільних | вільних | вільних | |||||||||
| зафіксованих | зафіксованих | зафіксованих | |||||||||
| p4 | число рухів | обертальних | поступальних | число рухів | обертальних | поступальних | |||||
| дозволених | дозволених | ||||||||||
| зафіксованих | зафіксованих | ||||||||||
| p5 | число рухів | обертальних | поступальних | число рухів | обертальних | поступальних | число рухів | обертальних | поступальних | ||
| дозволених | дозволених | дозволених | |||||||||
| зафіксованих | зафіксованих | зафіксованих | |||||||||
Приклади реалізації кінематичних пар
Обертальна пара — клас 5, допускає лише відносний обертальний рух ланок навколо осі. Ланки пари стикаються по циліндричній поверхні, отже, це нижча пара, замкнута геометрично. Роль такої кінематичної пари виконує і складніша конструкція - підшипник кочення.
Поступальна пара — клас 5, з геометричним замиканням, нижча, допускає лише прямолінійний поступальний відносний рух ланок.
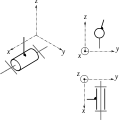
Циліндрична пара — клас 4, з геометричним замиканням, нижча, допускає незалежний обертальний і поступальний відносний рух ланок.
Сферична пара — клас 3, з геометричним замиканням, нижча, допускає три незалежні відносні обертання ланок навколо осей x, y, z.
Сферична пара з пальцем — клас 4, з геометричним замиканням, нижча, допускає два незалежні відносні обертання ланок навколо осей, що визначаються прорізом і пальцем (доданим до сферичної пари).
Гвинтова пара — клас 5, з геометричним замиканням, нижча, допускає відносний гвинтовий рух ланок з постійним кроком. Кутові і лінійні переміщення ланок гвинтової пари мають однозначну відповідність, внаслідок чого залишається тільки один ступінь свободи.
Плоска пара — клас 3, циліндр-площина — 2 клас і сфера-площина — 1 клас, пари використовують силове замикання, причому перша з них нижча, а дві інші вищі. Ці пари практично не застосовуються в реальних механізмах і описані в цьому огляді для повноти представлення класифікації кінематичних пар.
Зв'язана система кінематичних пар утворює кінематичний ланцюг, на основі якого реалізуються механізми.
 Обертальна пара
Обертальна пара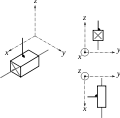 Поступальна пара
Поступальна пара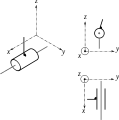 Циліндрична пара
Циліндрична пара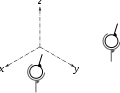 Сферична пара
Сферична пара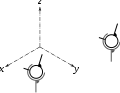 Сферична пара з пальцем
Сферична пара з пальцем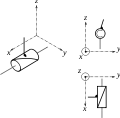 Гвинтова пара
Гвинтова пара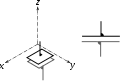 Плоска пара
Плоска пара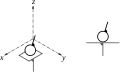 Сфера-площина
Сфера-площина
Джерела
- Кіницький Я. Т. Теорія механізмів і машин:Підручник .-К.: Наукова думка, 2002.- 660 с. — ISBN 966-00-0740-Х
- Кореняко О. С. Теорія механізмів і машин:Навчальний посібник/За ред. Афанасьєва М. К.-К.: Вища школа, 1987.- 206 с.
- Артоболевский И. И. Теория машин и механизмов. М.: Наука, 1988.
- Попов С.В., Бучинський М.Я., Гнітько С.М., Чернявcький А.М. Теорія механізмів технологічних машин: підручник для студентів механічних спеціальностей закладів вищої освіти. Харків: НТМТ, 2019. 268 с.
Дивись також
Механізм
Машина
Кінематичний ланцюг
Принципова кінематична схема
