Принципова кінематична схема
Принципо́ва кінемати́чна схе́ма — графічна схема на якій показано послідовність передачі руху від двигуна через передавальний механізм до робочих органів машини (наприклад, шпинделю токарного верстата, різальному інструменту: свердлу, зенкеру тощо), ведучим колесам автомобіля та ін.) і їх взаємозв'язок.
На кінематичних схемах зображають тільки ті елементи (ланки) машини або механізму, які беруть участь в передачі руху (зубчасті колеса, ходові гвинти, вали, шківи, муфти та ін.) без дотримання розмірів і пропорцій.
Нормативні документи
Стандарти, що регламентують умовні позначення та виконання кінематичних схем:
ГОСТ 2.770-68 (2000) ЕСКД. Обозначения условные графические на схемах. Элементы кинематики.- ДСТУ ГОСТ 2.703:2014. ЄСКД. Правила виконання кінематичних схем (ГОСТ 2.703-2011, IDT).
- ДСТУ EN ISO 3952-1:2018 Кінематичні схеми. Графічні умовні познаки. Частина 1 (EN ISO 3952-1:1994, IDT; ISO 3952-1:1981, IDT).
- ДСТУ EN ISO 3952-2:2018 Кінематичні схеми. Графічні умовні познаки. Частина 2 (EN ISO 3952-2:1994, IDT; ISO 3952-2:1981, IDT).
- ДСТУ EN ISO 3952-3:2018 Кінематичні схеми. Графічні умовні познаки. Частина 3 (EN ISO 3952-3:1994, IDT; ISO 3952-3:1979, IDT).
- ДСТУ EN ISO 3952-4:2018 Кінематичні схеми. Графічні умовні познаки. Частина 4 (EN ISO 3952-4:1997, IDT; ISO 3952-4:1984, IDT).
- ISO 3952 Kinematic diagrams — Graphical symbols.
Правила виконання кінематичних схем
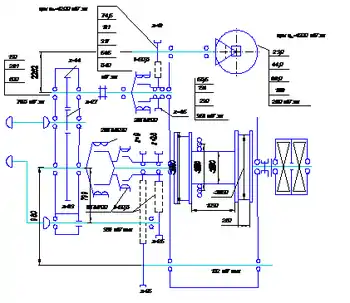
Корпусні частини складальної одиниці (машини або механізму) не показують зовсім або наносять їх контур суцільними тонкими лініями. Просторові кінематичні механізми зображають зазвичай у вигляді розгорнених схем в ортогональних проекціях. Вони отримуються шляхом розміщення всіх осей в одній площині. Такі схеми дозволяють з'ясувати послідовність передачі руху, але не показують дійсного розташування деталей механізму. Кінематичні схеми допускається виконувати в аксонометрії.
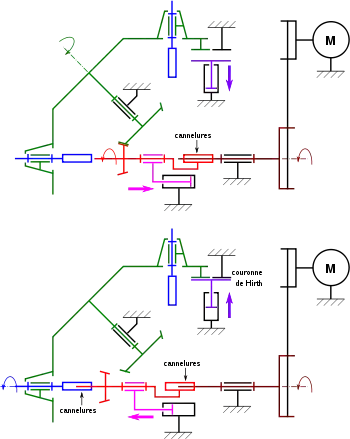
Всі деталі (ланки) на кінематичних схемах зображають умовно у вигляді графічних символів (ДСТУ EN ISO 3952 (ГОСТ 2.770-68 (2000))), що лише розкривають принцип їх роботи. Сполучення суміжних ланок, котре допускає їх відносний рух, називають кінематичною парою. Найпоширеніші кінематичні пари: обертова (шарнір), поступальна (повзун чи напрямна), гвинтова (гвинт і гайка), сферична (кульовий шарнір). Допускається застосовувати нестандартні умовні графічні позначення, але з відповідним поясненнями на схемі. На кінематичній схемі дозволяється зображати окремі елементи схем інших видів, що безпосередньо впливають на її роботу (наприклад, електричні або гідравлічні).
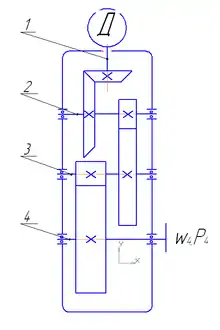
Окрім умовних графічних позначень, на кінематичних схемах дають вказівки у вигляді надписів, що пояснює зображений елемент. Наприклад, указують тип і характеристику двигуна, діаметри шківів пасової передачі, модуль і число зубів зубчастих коліс та ін. Взаємне розташування ланок на кінематичній схемі повинно відповідати початковому, середньому або робочому положенню виконавчих органів механізму чи машини. Допускається пояснювати написом положення виконавчих органів, що зображені на схемі. Якщо ланка при роботі виробу змінює своє положення, то на схемі допускається указувати її крайні положення тонкими штрихпунктирними лініями. На кінематичній схемі ланкам присвоюють номери в порядку передачі руху, починаючи від двигуна. Вали нумерують римськими цифрами, решту елементів — арабськими. Порядковий номер елементу проставляють на полиці виносної лінії. Під полицею указують основні характеристики і параметри кінематичної ланки. На кінематичних схемах вали, осі, стрижні, гонки, корби зображають суцільними основними лініями; зубчасті колеса, черв'яки, зірочки, шківи, кулачки суцільними тонкими лініями.
Читання кінематичних схем
Читати кінематичну схему починають від двигуна, як джерела руху всіх деталей механізму. Визначаючи послідовно за умовними позначеннями кожен елемент кінематичного ланцюга, встановлюють його призначення та характер передачі руху.
Література
- Артоболевский И. И. Теория машин и механизмов. М. Наука 1988. — 640 с.
- Кіницький Я. Т. Теорія механізмів і машин: Підручник. — К.:Наукова думка,2002. — 660 с. — ISBN 966-00-0740-Х
- Кореняко О. С. Теорія механізмів і машин: Навчальний посібник / За ред. Афанасьєва М. К. — К.: Вища школа,1987. — 206 с.
- Попов С. В., Бучинський М. Я., Гнітько С. М., Чернявcький А. М. Теорія механізмів технологічних машин: підручник для студентів механічних спеціальностей закладів вищої освіти. — Харків: НТМТ, 2019. — 268 с.