Ланка транспортного запізнення
Ла́нка тра́нспортного запі́знення — поняття, що відноситься до теорії автоматичного керування. Елемент системи автоматичного регулювання.
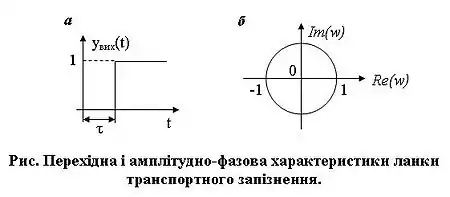
Ланка транспортного запізнення — ланка, в якій вихідна величина відтворює вхідну без спотворень, але з деяким постійним запізненням τ.
Ця ланка описується рівнянням:
- у = х (t — τ),
де τ — час транспортного запізнення.
Вихідна величина ланки запізнення точно копіює його вхідну величину, однак з деяким запізненням за часом τ .
Прикладом ланки, що запізнюється, може служити конвеєр, в якому після зміни вхідної величини, наприклад, подачі матеріалу на початку конвеєра, повинен минути певний проміжок часу τ, перш ніж почнеться зміна вихідної величини — кількість матеріалу в зоні розвантаження конвеєра.

Наявність у системі регулювання ланки транспортного запізнення значно знижує якість регулювання, а іноді робить систему регулювання нестійкою, що буде розглянуто нижче.
Див. також
Література
- Енциклопедія кібернетики. тт. 1, 2. — К.: Головна редакція УРЕ, 1973. — 584 с.
- Іванов А. О. Теорія автоматичного керування: Підручник. — Дніпропетровськ: Національний гірничий університет. — 2003. — 250 с.
- Папушин Ю. Л., Білецький В. С. Основи автоматизації гірничого виробництва. — Донецьк : Східний видавничий дім, 2007. — 168 с. — ISBN 978-966-317-004-6.