Мультистатичний радар
Мультистатичний радар це система, що складається з декількох рознесених у просторі моностатичних радарів або бістатичних радарів з спільною площею покриття. Важливою відмінністю систем, складених з окремих радарів з різною геометрією покриття, це додатковий етап злиття даних із усіх компонентів. Просторове рознесення, характерне для мультистатичних систем, дозволяє спостерігати за ціллю з декількох напрямів одночасно. Потенціал із збільшенням кількості корисної інформації дає таким системам ряд переваг у порівнянні зі звичайними системами.
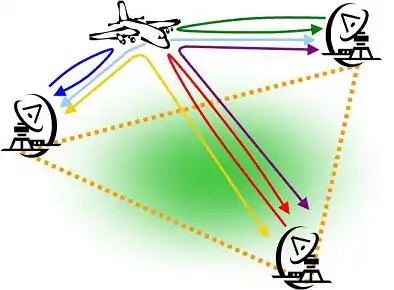
Мультистатичний радар часто називається ‘мережевим’ радаром, і може бути порівняний з ідеєю макрорознесення пристроїв зв'язку.
Характеристики
Оскільки мультистатичний радар може включати як моностатичні так і бістатичні компонени, переваги і недоліки кожного з радарів також мають відношення і до мультистатичних систем.
Система з передавачів і приймачів буде мати пар таких компонентів, кожен з який може мати різний бістатичний кут і цільову ефективну прощу розсіювання радара. Для набору різних пар передавачів-приймачів, наступні характеристики будуть унікальними для мультистатичних систем:



Виявлення сигналу
Збільшення покриття для мультистатичного радару, може відбуватися за допомогою розповсюдження геометрії системи по всій області спостереження - так що цілі зазвичай більш ймовірно будуть фізично знаходитись ближче до пари передавач-приймач таким чином буде досягнуте краще співвідношення сигнал/шум.
Просторове покриття також може збільшити ефективність при об’єднанні інформації з декількох пар передавач-приймач при спільному покритті. Шляхом зважування і інтегрування окремих результатів (наприклад від детекторів на основі відношення правдоподібності), процедуру виявлення цілі можна оптимізувати приділяючи більше уваги більш сильним отриманим сигналам від конкретних моностатичних або бістатичних значень Ефективна площа розсіювання, або від більш сприятливих зон поширення, при прийнятті рішення про наявність цілі. Це аналогічно використанню технології рознесення антен для поліпшення зв'язку в бездротовій мережі зв'язку.
Це корисно, для випадків коли багатопроменеве поширення або затінення можуть призвести до поганої видимості, при використанні лише одного радару. Одним із прикладів таких явищ виникає при морській поверхні, при якому такі системи можуть бути корисними через неоднорідність відбивної здатності сигналу і ефекту Доплера.
Багато літальних апаратів за технологією Стелс спроектовані так, щоб відбивати редіолокаційну енергію від очікуваних місць розміщення раліолокаційних приймачів, для того, щоб як можна менше повертати сигналу до моностатичної системи. Це призводить до того, що більше енергії буде випромінюватись у напрямках, які можна зареєструвати лише у мультистатичних системах.
Роздільна здатність

Завдяки просторовому рознесенні радарів можна отримати більшу роздільну здатність, завдяки наявності кількох просторово різних профілів орієнтації радару відносно цілі. Звичайний радар, як правило, має нижчу роздільну здатність крос-діапазону, тому існує можливість поліпшити його із використанням бістатичного діапазону, у точці перетину еліпсів.
Класифікація (розпізнавання)
Такі особливості цілі, як варіації в крос-діапазоні радара або модуляція реактивного двигуна може виявлятися парами передавач-приймач мультистатичної системи. Додаткова інформація, отримана за допомогою спостереження за ціллю з різних сторін може покращити можливість класифікації цілі. Більшість існуючих систем ППО використовують ряд об'єднаних в мережу моностатичних радарів, без використання бістатичних пар в системі.
Надійність
Завдяки розподіленій природі у мультистатичної системи радарів з’являються такі властивості як підвищена виживаність і поступова деґрадація. Несправність передавача або приймача у моностатичному радарі призведе до повної втрати функціональності радара. Із тактичної точки зору, один великий передавач буде легше знайти і знищити ворогу, в порівняно з кількома розподіленими передавачами. Крім того, може бути досить важко практично сфокусувати сигнал перешкод так, щоб заглушити множину приймачів, в порівнянні з тим, якщо він один.
Просторово-часова синхронізація
Для визначення розміру або швидкості цілі відносно мультистатичної системи, необхідно мати дані про просторове розміщення передавачів і приймачів. Також повинна зберігатися взаємна стандартизація відміток часу і частоти, якщо приймач не знаходиться на лінії прямої видимості з передавачем. Без цих відомостей, як і у бістатичному радарі, не можливо б було мати точне представлення інформації, отриманої за допомогою радару. Для систем, які використовують злиття даних перед визначенням цілі, існує необхідність в точній часовій або фазовій синхронізації різних приймачів сигналу. При злитті даних для виведення у вигляді діаграми, синхронізації за допомогою міток часу з використанням стандартного GPS-годинника (або аналогічних йому) більш ніж достатньо.
Вимоги до обробки сигналу
Процедура злиття даних завжди призводить до збільшення кількості обчислень, в порівнянні з роботою одного радару. Це може призводити до особливо великих обчислювальних витрат при злитті даних, особливо коли мають місце такі обчислення, як спроби збільшення роздільної здатності сигналу.
Джерела
- Chernyak, V.S. (1998). “Fundamentals of Multisite Radar System. Gordon and Breach Science Publishers. ISBN 90-5699-165-5.
- Li, J. Stoica, P. (ed) (2008). "MIMO Radar Signal Processing. Wiley-IEEE Press. ISBN 0-470-17898-1.
- M. M. Naghsh, M. Modarres-Hashemi, S. Shahbazpanahi, M. Soltanalian, P. Stoica, "Unified Optimization Framework for Multi-Static Radar Code Design Using Information-Theoretic Criteria," IEEE Transactions on Signal Processing, vol. 61, no. 21, pp. 5401-5416, Nov. 1, 2013.