Радар
Радіолокаці́йна ста́нція (РЛС) або рада́р (від англ. radar — скорочення від radio detection and ranging, «радіохвильове виявлення та ранжування») — система для виявлення повітряних, морських і наземних об'єктів, а також для визначення їхньої дальності та геометричних параметрів. Використовує метод, заснований на випромінюванні радіохвиль і реєстрації їх віддзеркалень від об'єктів. Англійський термін-акронім з'явився 1941 року, згодом у його написанні великі букви були замінені малими.
Історія
1887 року німецький фізик Генріх Герц розпочав експерименти, з ходом яких, відкрив існування електромагнітних хвиль, передбачених теорією Джеймса Максвелла. Герц навчився генерувати і вловлювати електромагнітні радіохвилі і виявив, що вони по-різному поглинаються і відбиваються різними матеріалами.
Попутно з роботами з радіозв'язку, російський інженер О. С. Попов, зробив ще одне важливе відкриття. 1897 року під час дослідів з радіозв'язку між кораблями, він виявив явище відбиття радіохвиль від судна. Радіопередавач було встановлено на верхньому містку транспорту «Європа», що стояв на якорі, а радіоприймач — на крейсері «Африка». У звіті комісії, призначеної для проведення цих дослідів, О. С. Попов писав:
«Вплив суднової обстановки позначається у наступному: усі металеві предмети (щогли, труби, снасті) повинні заважати дії приладів як на станції відправлення, так і на станції отримання, тому що, потрапляючи на шляху електромагнітної хвилі, вони порушують її правильність, почасти подібно тому, як діє на звичайну хвилю, що поширюється поверхнею води, брекватер, частково внаслідок інтерференції хвиль, у них порушених, з хвилями джерела, тобто впливають несприятливо.»
а також:
«Спостерігався також вплив проміжного судна. Так, під час дослідів між „Європою“ й „Африкою“ потрапляв крейсер „Лейтенант Ільїн“, і якщо це траплялося за великих відстаней, то взаємодія приладів припинялася, поки судна не сходили з однієї прямої лінії.»
1905 року X. Хюльсмейеру було видано німецький патент, за заявкою ідеї радіолокатора від 30 квітня 1904. У США відкриття відбиття радіохвиль, приписують Тейлору і Юнгу в 1922 році.
Один з перших пристроїв, призначених для радіолокації повітряних об'єктів, продемонстрував 26 лютого 1935 року шотландський фізик Роберт Ватсон-Ватт, який приблизно за рік до цього отримав перший патент на винахід подібної системи.
У другій половині 1930-х англійці почали встановлювати на своїх кораблях перші радари.
У США перший контракт військових з промисловістю було укладено 1939 року.
Розпочата Друга світова війна зажадала ефективних заходів боротьби з нальотами німецької авіації. Влітку 1940 року британські інженери під керівництвом Генрі Тізарда розробили резонансний магнетрон, що став основою нової ефективної бортової радарної системи сантиметрового діапазону, якою на початку 1941 року було оснащено американські та британські літаки.
В СРСР
У Радянському Союзі, до складу якого, на правах союзної держави, до 1991 року входила Україна, усвідомлення потреби засобів виявлення авіації, вільних від вад звукового та оптичного спостереження, призвело до розгортання досліджень у галузі радіолокації . Ідея, запропонована молодим артилеристом Павлом Ощепковим, отримала схвалення вищого командування: наркома оборони СРСР К. Є. Ворошилова та його заступника — М. Н. Тухачевського.
1932 року на базі Ленінградського фізико-технічного інституту, було створено Ленінградський електрофізичний інститут (ЛЕФІ) під керівництвом А. А. Чернишова, у якому проводилися дослідні та дослідно-конструкторські роботи з радіолокації. 1935 року ЛЕФІ було розформовано, а на його базі організовано «закритий» інститут НДІ-9 з оборонною тематикою, що охоплювала і радіолокацію. Науковим керівником його, став М. А. Бонч-Бруєвич. Роботи з радіолокації було розпочато і в Українському фізико-технічному інституті (УФТІ) у Харкові. До початку війни зусиллями вчених та інженерів ЛЕФІ, НДІ-9 та інших організацій, було створено дослідні наземні радіолокаційні станції. 3 січня 1934 року у СРСР було успішно проведено експеримент з виявлення літака радіолокаційним методом. Літак, що летів на висоті 150 метрів, було виявлено на дальності 600 метрів від радарної установки. Дослід було організовано представниками Ленінградського Інституту Електротехніки та Центральної радіолабораторії. Керував експериментом військовий інженер М. М. Лобанов, який, за свідченням академіка Ю. Б. Кобзарева, був першим, хто переконав промисловість перейнятися проблемою радіолокації. 1934 року, маршал Тухачевський у листі уряду СРСР написав: «Досліди з виявлення літаків за допомогою електромагнітного променя підтвердили правильність покладеного в основу принципу». Радянський військовий інженер П. К. Ощепков, у співпраці з Ленінградським електрофізичним інститутом, сконструював експериментальний апарат, здатний виявляти повітряне судно у межах 3 км від приймача. Але у подальшому, дослідні роботи було уповільнено через арешт НКВС П. Ощепкова та подальшим відправленням його до ГУЛАГу. Першу дослідну установку « Рапід» було випробувано у тому ж році, а 1936 року радянська сантиметрова радіолокаційна станція «Буря» засікала літак з відстані 10 кілометрів. Перші РЛС в СРСР, прийнято на озброєння РСЧА і випускалися серійно, були: РУС −1 — з 1939 року і РУС −2 — з 1940 року. Під час війни програму зі створення радянських радарів, очолював інженер -адмірал Аксель Берг, відомості про американські розробки, добувала радянська розвідка. Перший у Радянському Союзі авіаційний радіолокатор, Гнейс-2, було введено в експлуатацію у червні 1943 року на літаку Пе-2. 1946 року американські фахівці — Реймонд і Хачертон, колишній співробітник посольства США у Москві, написали: « Радянські вчені успішно розробили теорію радара за кілька років до того, як радар було винайдено у Англії».
Класифікація

За призначенням
- РЛС виявлення
- РЛС управління і стеження
- панорамні РЛС
- РЛС бічного огляду
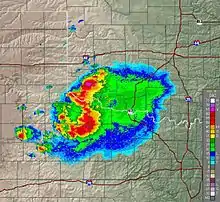
- метеорологічні РЛС
- РЛС цілевказівні
- РЛС контрбатарейної боротьби
- РЛС огляду обстановки
- Поліцейський радар
- РЛС виміру швидкості снарядів для артилерійських систем (та контрбатарейна РЛС)
За характером носія
- берегові РЛС;
- морські РЛС
- бортові РЛС
- мобільні РЛС
За типом дії
- первинні або пасивні
- вторинні або активні
- суміщені
За методом дії
- надобрійний радіолокатор
 Визначення відстані до літака
Визначення відстані до літака - заобрійний радіолокатор
За діапазоном хвиль
- метрові
- дециметрові
- сантиметрові
- міліметрові
Первинний радіолокатор
Первинний (пасивний) радіолокатор, в основному, служить для виявлення цілей, висвітлюючи їх електромагнітної хвилею і потім приймаючи відбиття (луну) цієї хвилі від цілі. Оскільки швидкість електромагнітних хвиль постійна (швидкість світла), стає можливим визначити відстань до цілі, ґрунтуючись на вимірюванні різних параметрів розповсюдження сигналу.
В основі пристрою радіолокаційної станції лежать три складові: передавач, антена і приймач.
Передавач (передавальний пристрій) є джерелом електромагнітного сигналу високої потужності. Він може являти собою потужний імпульсний генератор. Для імпульсних РЛС сантиметрового діапазону — зазвичай, магнетрон або імпульсний генератор, що працює за схемою: задавальний генератор — потужний підсилювач, який використовує як генератор, найчастіше, лампу біжучої хвилі (ЛБХ), а для РЛС метрового діапазону, часто застосовують тріодну лампу. РЛС, які використовують магнетрони, некогерентні або псевдо-когерентні, на відміну від РЛС на основі ЛБХ. Залежно від конструкції, передавач працює або в імпульсному режимі, формуючи повторювані короткі потужні електромагнітні імпульси, або випромінює безперервний електромагнітний сигнал.
Антена виконує фокусування сигналу передавача і формування діаграми спрямованості, а також, приймання відбитого від цілі сигналу та передавання цього сигналу у приймач. Залежно від реалізації прийняття відбитого сигналу, може здійснюватися або тією -ж самою антеною, чи іншою, яка іноді може розташовуватися на значній відстані від передавального пристрою. У разі, якщо передавання та приймання поєднано в одній антені, ці дві дії виконуються почергово, а щоби потужний сигнал, що проникає від передавача у приймач, не засліпив приймач слабкої луни, перед приймачем розміщують спеціальний пристрій, який закриває вхід приймача у мить випромінювання зондувального сигналу.
Приймач (приймальний пристрій) виконує посилення й обробку прийнятого сигналу. У найпростішому випадку, підсумковий сигнал подається на променеву трубку (екран), яка показує зображення, синхронізоване з рухом антени.
Методи вимірювання відбитого сигналу
Частотний метод
Частотний метод вимірювання дальності, засновано на використанні частотної модуляції випромінюваних безперервних сигналів. У цьому методі, за період випромінюється частота, яка змінюється за лінійним законом від f1 до f2. Відбитий сигнал прийде модульованим лінійно у мить часу, що передує теперішньому, на час затримки. Таким чином, частота відбитого сигналу, прийнятого на РЛС, буде пропорційно залежати від часу. Час запізнювання визначається за різкою зміною у частоті різницевого сигналу.
переваги:
- дозволяє вимірювати дуже малі дальності;
- використовується малопотужний передавач;
хиби:
- потрібне використання двох антен;
- погіршення чутливості приймача внаслідок просочування крізь антену в приймальний тракт випромінювання передавача, підданого випадковим змінам;
- високі вимоги до лінійності зміни частоти;
Фазовий метод
Фазовий (когерентний) метод радіолокації засновано на виділенні й аналізі різниці фаз відправленого та відбитого сигналів, яка виникає через ефект Доплера, коли сигнал відбивається від рухомого об'єкту. У цьому разі, передавальний пристрій може працювати як безперервно, так і в імпульсному режимі. В одночастотному режимі випромінювання основною перевагою даного методу є те, що він "дозволяє спостерігати лише рухомі об'єкти, а це усуває перешкоди від нерухомих предметів, розташованих між приймальною апаратурою та спостережним об'єктом або за ним".
Однозначний діапазон виміру дальності при одночастотному зондуванні визначається за виразом[1]:
,

де — швидкість світла;

- — частота випромінювання.

Щоб розширити діапазон однозначного виміру дальності, на практиці використовують складніші схеми, в яких присутні дві або більше частот. У цьому випадку однозначна дальність визначається максимальним частотним рознесенням випромінюваних сигналів:

.

Переваги:
- малопотужне випромінювання, оскільки генеруються незгасні коливання;
- точність не залежить від доплерівського зсуву частоти відбиття;
- досить простий пристрій;
Вади:
- відсутність здатності розрізняти дальність (усувається за рахунок використання багаточастотних сигналів[1]);
- погіршення чутливості приймача внаслідок проникнення крізь антену в приймальний тракт, випромінювання передавача, підданого випадковим змінам.
Імпульсний метод
Сучасні радари супроводу побудовано як імпульсні радари. Імпульсний радар передає випромінювальний сигнал тільки протягом дуже короткого часу, коротким імпульсом (зазвичай приблизно мікросекунда), після чого переходить у режим приймання та слухає відлуння, відбите від цілі, у той час як випромінений імпульс поширюється у просторі.
Оскільки імпульс йде далеко від радара з постійною швидкістю, між часом, що пройшов з миті посилання імпульсу до миті отримання луна-відповіді, та відстанню до цілі — пряма залежність. Наступний імпульс можна послати лише за деякий час, а саме після того, як імпульс прийде назад (це залежить від дальності виявлення радара, потужності передавача, посилення антени, чутливості приймача). Якщо імпульс посилати раніше, то відлуння попереднього імпульсу від віддаленої цілі, може бути поплутано з луною другого імпульсу від близької цілі. Проміжок часу між імпульсами називають інтервалом повторення імпульсу, зворотна до нього величина — важливий параметр, який називають частотою повторення імпульсу (ЧПІ). Радари низької частоти далекого огляду, зазвичай, мають інтервал повторення у кілька сотень імпульсів на секунду. Частота повторення імпульсів є однією з характерних ознак, за якими можливе дистанційне визначення моделі РЛС.
Переваги імпульсного методу вимірювання дальності:
- можливість побудови РЛС з однією антеною;
- простота індикаторного пристрою;
- зручність вимірювання дальності кількох цілей;
- простота випромінюваних імпульсів, що тривають дуже короткий час, і прийнятих сигналів;
Хиби:
- потреба використання великих імпульсних потужностей передавача;
- неможливість вимірювання малих дальностей;
- велика мертва зона;
Хвильовий радар
Використовується задля вимірювання океанських хвиль з застосуванням морських радарів.
Вітрові хвилі можна виміряти за допомогою декількох радіолокаційних способів дистанційного зондування. Користувачеві доступно кілька приладів, заснованих на безлічі різних концепцій і методів, і усі вони часто називаються хвильовими радарами.
Прилади, які засновано на радіолокаційних методах дистанційного зондування, мають особливий інтерес у тих випадках, де є небажаним, прямий контакт з поверхнею води й треба уникнути структурної перешкоди.
Радар дистанційного зондування
- Терміни та визначення
В основному є два різні класи дистанційних радіолокаційних давачів для вивчення океанських хвиль.
Прямий давач вимірює безпосередньо деякі з відповідних параметрів системи хвиль (наприклад, висоту поверхні або швидкості частинок води).
Непрямі давачі спостерігають поверхневі хвилі через взаємодію з будь-яким іншим фізичним процесом, як, наприклад, поперечний переріз радіолокаційної поверхні моря.
Радіолокаційні системи високої частоти (ВЧ) вимірюють швидкість і напрямок поверхневих течій океану у близькому до дійсного, часі. Течії в океані, відповідають вітрам в атмосфері, тому що вони рухаються разом — з одного місця в інше. Ці течії переносять поживні, а також забруднювальні речовини, тому важливо знати їх напрямки з екологічних й економічних міркувань. Потоки переносять плавальні об'єкти, тому пошуково-рятувальні служби берегової охорони використовують радіолокаційні дані HF, задля прийняття важливих рішень під час рятування пошкоджених суден і людей, що застрягли у воді.
Ці радари можуть вимірювати течії на великому просторі прибережного океану, від декількох кілометрів від берега до 200 км, і можуть працювати за будь-яких погодних умов. Їх розташовано неподалік від краю води, і їм не треба бути розміщеними на найвищій точці землі. HF радари є єдиними давачами, які можуть досліджувати великі площі відразу.
Радіолокаційні приймачі можуть бути когерентними або некогерентними. Когерентні радіолокатори використовують ефект Доплера, а також амплітудну модуляцію, натомість, некогерентні радари, вимірюють лише амплітудною модуляцією. Отже, некогерентне радіолокаційне відлуння, містить менше інформації про властивості поверхні моря. Прикладами некогерентних РЛС є звичайні морські навігаційні радари.
Енергія від зворотного розсіювання морської поверхні у залежності від кута
Передавач сигналу радара може бути немодульованим, безперервної хвилі, або модульованим чи імпульсним. Радар немодульованої безперервної хвилі, не має дозволу за дальністю, але може вирішити завдання на основі різної швидкості, у той час як, модульований або імпульсний радар, може використати луна-сигнали від різних діапазонів.
- Продуктивність хвильового радара
Дуже залежить від:
- режиму роботи або геометрії вимірювання (вертикального або площинного);
- класу системи (пряма чи непряма);
- частоти роботи радіолокаційного сигналу (немодульований CW або модульований / імпульсний);
- типу приймача (когерентний або некогерентний);
- властивості радіолокаційної антени;
Методи дистанційного зондування
Шукачі НВЧ (надвисокої частоти) - діапазону також працюють у вертикальному режимі на частотах ГГц, і не так страждають від туману і бризок води, як лазерний висотомір. Безперервна частота хвилі модульованого (CWFM) або імпульсного сигналу радара, як правило, використовується для забезпечення роздільної здатності за дальністю. Промені дисперсійні, отже, і розмір відбитку лінійно зростає з діапазоном.
Двочастотний НВЧ-радар
Двочастотний НВЧ-радар, випромінює дві мікрохвильові частоти одночасно. Поділ частот обирається так, щоби дати довге «просторове відбиття», яке знаходиться у межах хвиль на поверхні рідини, що представляють цікавість. Двочастотний радар може розглядатися як мікрохвильовий еквівалент високої частоти (ВЧ) радара. РЛС подвійної частоти, підходить для вимірювання поверхневих течій. Що стосується вимірювання хвилі, процеси зворотного розсіювання занадто складні.
КХв радар
Короткохвильові радари, добре показали себе як потужний інструмент для вимірювання течій на морі на відстані до 200 км. Вони працюють у ВЧ та НВЧ-діапазоні частот, що відповідає довжині хвилі радара у діапазоні від 10 до 300 м. Доплерівське зрушення першого порядку Брегга ліній радіолокаційного луна-сигналу, використовується для отримання поточних оцінок на морі дуже схожим чином, як і для мікрохвильового радара подвійної частоти. Потрібно, як правило, дві радарні установки, які спостерігають ту саму ділянку морської поверхні під різними кутами. Останнє покоління берегових океанських радарів, може сягати більше 200 кілометрів. Для усіх океанічних радарів, точність у діапазоні відмінна. На більш коротких відстанях, роздільна здатність за дальністю, стає меншою. Кутовий дозвіл і точність, залежить від використовуваної конфігурації антенної ґратки і прикладних алгоритмів (пеленгації або формування променю). Система WERA забезпечує можливість використовувати обидва методи; компактну версію з пеленгацією, або антенною системою типу масив, з методами, що утворюють жмут.
Військові високочастотні радари

Удосконалення високочастотних радарів у Китайській Народній Республіці та Російській Федерації дозволяє знизити ефективність технології «стелс» на винищувачах F-22 і F-35[2].
Стелс — покриття на винищувачах п'ятого покоління, що захищає літак від високочастотних радарів, які працюють у смугах частот Ku, X і C і деяких з S групи, але не від низькочастотних систем з використанням L, UHF і VHF довжин хвиль[3].
Китай і Російська федерація у 2010-і роки працювали над розробкою низькочастотних радарів з більшою обчислювальною потужністю, призначених для відстеження літаків «стелс» з точністю, достатньою для наведення на них зенітних ракет[3]. Це є свідченням тенденції зниження робочих частот радарів керування вогнем[3].
Завадозахищеність
Найефективнішим методом протидії активним завадам є застосування в РЛС цифрової антенної решітки, яка забезпечує формування «нулів» у діаграмі спрямованості у напрямках постановників завад.[4][5][6]
Див. також
- Роберт Ватсон-Ватт
- Георадар
- Електромагнітна завада
- Радіолокаційні перешкоди
- Протиповітряна оборона
- Протиракетна оборона
- Радар із синтезованою апертурою
- Радіоелектронна боротьба
- Поліцейський радар
- Антирадар
- Радар-детектор
- Радіофотонна РЛС
- Локатор
- Система радіолокації (аеропорт)
- Луна (акустичне явище)
Примітки
- Солощев O. Н., Слюсар В.И., Твердохлебов В. В. Фазовый метод измерения дальности на основе теории многоканального анализа.// Артиллерийское и стрелковое вооружение. – 2007. - № 2(23).- C. 29 – 32.
- Majumdar, Dave. Look Out, America: China Can Un-Stealth U.S. Stealth Aircraft. The National Interest. Процитовано 30 березня 2016.
- Majumdar Usni News.
- Слюсар, В. И. (2005). Основные понятия теории и техники антенн. Антенные системы евклидовой геометрии. Фрактальные антенны. SMART-антенны. Цифровые антенные решётки (ЦАР). MIMO–системы на базе ЦАР.. Разделы 9.3-9.8 в книге «Широкополосные беспроводные сети передачи информации». / Вишневский В. М., Ляхов А. И., Портной С. Л., Шахнович И. В. — М.: Техносфера. — 2005. с. C. 498–569.
- Слюсар, В. И. (2001). Цифровые антенные решётки: будущее радиолокации.. Электроника: наука, технология, бизнес. — 2001. — № 3. с. C. 42–46.
- Слюсар, В. И. (2002). Цифровые антенные решётки: аспекты развития.. Специальная техника и вооружение. — Февраль, 2002. — № 1,2. с. С. 17–23. Архів оригіналу за 23 грудня 2018. Процитовано 7 серпня 2017.
Посилання
- MIT Video Course: Introduction to Radar Systems A set of 10 video lectures developed at Lincoln Laboratory to develop an understanding of radar systems and technologies.
- Popular Science, August 1943, What Are the Facts About RADAR one of the first detailed factual articles on radar history, principles and operation published in the US
- «The Great Detective», 1946. Story of the development of radar by the Chrysler Corporation
- Christian Hülsmeyer and the early days of radar
- Radar: The Canadian History of Radar — Canadian War Museum
- Radar technology principles
- History of radar
Література
- Теорія радіолокаційних систем: підручник / Б. Ф. Бондаренко, В. В. Вишнівський, В. П. Долгушин та ін. ; за заг. ред. С. В. Лєнкова ; Київ. нац. ун-т ім. Т. Шевченка. — 2-ге вид., доп. — К. : ВПЦ «Київ. ун-т», 2011. — 384 с. : іл. — Бібліогр.: с. 361—365 (51 назва). — ISBN 978-966-439-422-9
