Об'єкт керування
Об'є́кт керува́ння (регулювання) — об'єкт, що потребує спеціально організованих діянь для того, щоб забезпечити близькі до бажаних процеси та (або) значення (співвідношення значень) параметрів[1].

В автоматизованих системах під об'єктом керування розуміється умовно відокремлена частина системи, на яку впливає система керування для досягнення необхідного результату[2].
Об'єктом керування може бути окрема машина, апарат, пристрій, технологічний процес або сукупність технічних засобів (машин, апаратів, пристроїв), які виконують технологічний процес, але при цьому потребують спеціально організованих впливів ззовні для досягнення поставленої мети керування.
Прикладами об'єктів керування можуть служити технологічні процеси та технологічне обладнання, що використовуються у гірництві — флотаційний, гравітаційний процеси збагачення корисних копалин, а також флотаційна, відсаджувальна машини, магнітні сепаратори тощо.
Базисні поняття
- Вхідна величина об'єкта регулювання (канал керування) — фізична величина на вході об'єкта регулювання, значення якої впливає на регульовану величину об'єкта. Цей параметр будемо позначати як X(t).
- Регульована (вихідна) величина — фізичний параметр, який цілеспрямовано змінюється або зберігається незмінним у процесі керування. Умовимося позначати даний параметр через Y(t). Звичайно регульовані величини в тій або іншій мірі характеризують якісно-кількісні показники процесу в керованому об'єкті.
- Поточне значення регульованої величини (Yт) — абсолютне значення параметра в цей час часу.
- Задане значення регульованої величини (Yз) — абсолютне значення вихідного параметра, яке є метою керування даним об'єктом. Цей параметр вводиться у САР за допомогою елемента автоматики, який називають «задаючим пристроєм», або «задатчиком».
Задавач може розташовуватися поблизу регулятора або знаходитися на значній відстані від автоматичної системи і бути пов'язаним з нею дистанційно.
Характеристика ОК
Об'єкт регулювання може мати декілька вихідних параметрів.
Наприклад, флотаційна машина у цілому і окремі субпроцеси флотації, як об'єкт регулювання, має такі вихідні параметри:
- зольність і вихід продуктів збагачення,
- рівень пульпи у ванні флотомашини,
- ступінь аерації пульпи тощо.
Будова ОК
Для здійснення керування об'єкт повинен мати орган керування, або регулювальний орган, змінюючи положення або стан робочого елемента якого, можна впливати на об'єкт, тобто на вихідний параметр.
Кожний вихідний параметр керується, як правило, своїм локальним каналом (вхідним чинником) з допомогою відповідної САР. Наприклад, рівень пульпи у ванні флотаційної машини можна змінювати положенням шибера в камері розвантаження хвостів флотації або зміною об'ємного навантаження на машину.
Для пояснення будови і принципу дії автоматичних систем застосовують функціональні і структурні схеми автоматизації.
Класифікація об'єктів керування
Залежно від числа регульованих величин
У залежності від числа регульованих величин, необхідних для ефективної роботи регульованих об'єктів, останні розділяються на об'єкти з однією і декількома регульованими величинами.
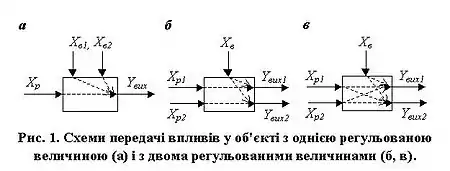
- Об'єкти з однією регульованою величиною мають одну вихідну Y_вих і декілька вхідних величин, з яких одна є регулюючим впливом Хр, а всі інші — збурюючими впливами Хв1,Хв2,…Хвп. (рис. 1 а). Збурення, що діє на об'єкт по тому ж каналу, що й регулюючий вплив, називається внутрішнім, або основним. Інші збурення називаються зовнішніми. У межах невеликих відхилень цих величин промислові об'єкти регулювання можуть розглядатися як лінійні системи. Тому відхилення регульованої величини Y_вих, викликане дією всіх вхідних величин, дорівнює сумі відхилень, викликаних дією кожного вхідного сигналу нарізно.
Для повного опису динамічних властивостей об'єкта з однією регульованою величиною необхідно знати стільки його диференціальних рівнянь (або характеристик, що замінюють їх), скільки вхідних величин він має.
- У разі регульованого об'єкта з декількома регульованими величинами (рис. 1 б, в) число регулюючих впливів, а отже, і кількість регулюючих органів, як правило, дорівнює числу регульованих величин.
У даному варіанті можливі два випадки:
- 1. Кожний канал керування (регулюючий орган) впливає тільки на одну регульовану величину (рис. 1 б). Тут об'єкт регулювання можна розбити на відповідне число незалежних один від одного локальних об'єктів. Тоді система регулювання об'єкта загалом складається з ряду окремих підсистем з однією регульованою величиною, які можуть працювати незалежно один від одного. Число таких підсистем повинно дорівнювати числу регульованих величин об'єкта. Реалізація системи керування таким об'єктом не викликає ускладнень.
- 2. Кожний канал керування, крім впливу на регульовану величину (за ним закріплену), певним чином впливає і на інші регульовані величини (рис. 1 в). У цьому випадку регульований об'єкт з декількома взаємопов'язаними регульованими величинами формально може бути представлений таким, що складається з декількох локальних об'єктів з однією регульованою величиною кожний, як і в першому випадку. Однак потрібно враховувати, що на кожний з цих локальних об'єктів впливають додаткові збурюючі впливи з боку інших локальних об'єктів. Тому настройка даних об'єктів іноді пов'язана з певними труднощами. У цих випадках існують способи реалізації принципу інваріантності локальних об'єктів, які забезпечують їх автономність.
За видом перехідної функції об'єкта регулювання
За видом перехідної функції об'єкта регулювання вони класифікуються на три категорії:
- стійкі,
- нестійкі,
- нейтральні.
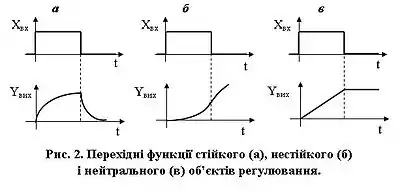
Об'єкт стійкий, якщо після закінчення дії зовнішнього імпульсного збурення (Х) він з плином часу повернеться до початкового стану (рис. 2 а). Стійкі об'єкти часто називають об'єктами, що володіють властивостями самовирівнювання. Тільки для даних об'єктів мають значення статичні характеристики, тому вони ще називаються — статичні об'єкти.
Нестійкі об'єкти характеризуються тим, що після припинення дії зовнішнього впливу вихідна величина (Yвих) продовжує змінюватися (рис. 2 б). Ці об'єкти не володіють властивостями самовирівнювання і вельми складні для автоматичного регулювання.
У нейтральних об'єктах або об'єктах, які частково володіють властивістю самовирівнювання, вихідна величина після зняття збурення набуває нового сталого значення (рис. 2 в). Ці об'єкти частіше називають астатичними.
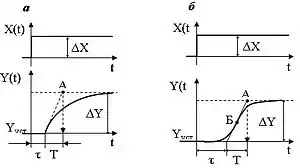
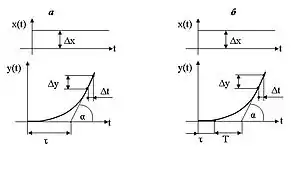
Графічна обробка кривих розгону статичних і астатичних об'єктів дозволяє знайти сталі часу та коефіцієнти в рівнянні передавальної функції.
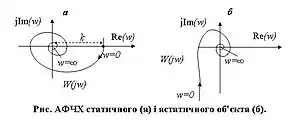
Статичні і астатичні об'єкти мають принципово різні амплітудно-фазово-частотні характеристики (рис.). Годограф АФЧХ астатичного об'єкта з транспортним запізненням при w=0 рівний нескінченності, що негативно позначається на стійкості всієї системи регулювання, яка містить даний об'єкт.
За розподілом параметрів об'єктів у просторі
Характерною особливістю об'єктів регулювання є розподіл їх параметрів у просторі. Інколи він незначний, тоді можна припустити, що параметри об'єкта зосереджені в одній точці — це об'єкти із зосередженими параметрами. У протилежному випадку виділяють об'єкти із розподіленими параметрами. Для зосереджених об'єктів змінні, що описують поведінку об'єкта, змінюються тільки в часі. Для об'єкта з розподіленими параметрами — і у часі, і у просторі. Прикладом об'єктів з розподіленими параметрами може бути довга лінія електропередач, магістральні газо-, нафто- та продуктопроводи тощо.
Примітки
- ДСТУ 3956-2000 Технічні засоби вимірювання та керування в промислових процесах. Частина 1. Основні поняття, терміни та визначення.
- ДСТУ 2226-93 Автоматизовані системи. Терміни та визначення.
Джерела
- Папушин Ю. Л., Білецький В. С. Основи автоматизації гірничого виробництва. — Донецьк : Східний видавничий дім, 2007. — 168 с. — ISBN 978-966-317-004-6.
- Іванов А. О. Теорія автоматичного керування: Підручник. — Дніпропетровськ: Національний гірничий університет. — 2003. — 250 с.
- Попович М. Г., Ковальчук О. В. Теорія автоматичного керування: Підручник. — К.: Либідь, 1997. — 544 с. — ISBN 5-325-00805-6
- Енциклопедія кібернетики. тт. 1, 2. — К.: Головна редакція УРЕ, 1973. — 584 с.