Пропорційний закон регулювання
Пропорційний закон регулювання або (П) закон регулювання — реалізуються регуляторами в системах автоматичного регулювання.
Автоматичні регулятори, що реалізовують даний закон, ще називають регуляторами з жорстким зворотним зв'язком, або статичними. Рівняння П-регулятора і передавальна функція мають вигляд:
- μ = kp Δ
- W(p) = kp
де μ — вплив регулятора на регулюючий орган (РО) за допомогою виконавчого механізму (ВМ); Δ — сигнал розузгодження, виділений на елементі порівняння (ЕП).
Коефіцієнт передачі регулятора (кр) чисельно рівний переміщенню регулюючого органу, яке здійснює регулятор при відхиленні вихідної величини на одиницю її вимірювання.
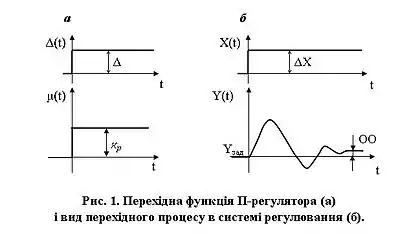
Перехідна функція П-регулятора і типовий перехідний процес показані на рис. 1.
Див. також
Література
- Іванов А. О. Теорія автоматичного керування: Підручник. — Дніпропетровськ: Національний гірничий університет. — 2003. — 250 с.
- Енциклопедія кібернетики. тт. 1, 2. — К.: Головна редакція УРЕ, 1973. — 584 с.
- Папушин Ю. Л., Білецький В. С. Основи автоматизації гірничого виробництва. — Донецьк : Східний видавничий дім, 2007. — 168 с. — ISBN 978-966-317-004-6.
This article is issued from Wikipedia. The text is licensed under Creative Commons - Attribution - Sharealike. Additional terms may apply for the media files.