Пропорційно-диференціальний закон регулювання
Пропорціонально-диференціальний (ПД) закон регулювання. Регулятор, що реалізує даний закон регулювання, можна зобразити у вигляді системи, що містить два паралельно працюючих типових ланки: пропорційної та ідеальної диференціюючої.
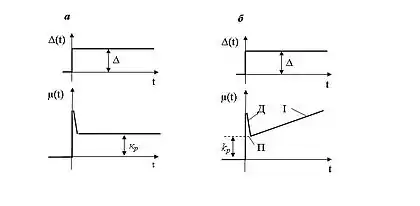
Позитивною особливістю даного закону є те, що регулювання ведеться з урахуванням як величини відхилення регульованого параметра, так і швидкості його зміни. Чим крутіший фронт відхилення вихідної величини, тим на більшу величину переміщається робочий орган (рис. 1 а). Як тільки припиняється зміна регульованої величини, регулятор починає відпрацьовувати пропорційну частину. Ефект передування значно підвищує якість перехідного процесу.
Підкреслимо, що регулятор, який враховує тільки першу похідну величини відхилення регульованого параметра, неприйнятний, оскільки при швидкості зміни параметра, що дорівнює нулю, він може мати будь-яке стале значення, значно відмінне від заданого. Тому Д-регулятор «в чистому вигляді» не існує.
Див. також
Література
- Іванов А. О. Теорія автоматичного керування: Підручник. — Дніпропетровськ: Національний гірничий університет. — 2003. — 250 с.
- Енциклопедія кібернетики. тт. 1, 2. — К.: Головна редакція УРЕ, 1973. — 584 с.
- Папушин Ю. Л., Білецький В. С. Основи автоматизації гірничого виробництва. — Донецьк : Східний видавничий дім, 2007. — 168 с. — ISBN 978-966-317-004-6.