Пропорційно-інтегральний закон регулювання
Пропорціонально-інтегральний (ПІ) закон регулювання. Регулятори, які працюють за даним законом, виконують переміщення регулюючого органу пропорціонально сумі відхилення та інтеграла від відхилення регульованої величини, тобто здійснюють П- та І- вплив:
, реалізовується ізодромним або ПІ-регулятором з параметрами налаштування та



У динамічному відношенні ПІ-регулятор подібний системі з двох паралельно включених регуляторів: пропорційного з коефіцієнтом передачі К1 та інтегрального з коефіцієнтом передачі К2.
Реалізовується ПІ-закон за допомогою гнучкого зворотного зв'язку.
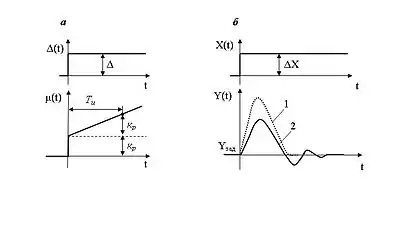
Наявність гнучкого зворотного зв'язку виключає залишкову нерівномірність у перехідному процесі (рис. 1 б). У залежності від динамічних властивостей об'єкта регулювання і настроювальних параметрів регулятора перехідний процес може бути аперіодичним (крива 1) або затухаючим коливальним (крива 2). У першому випадку зростає амплітуда перерегулювання, але скорочується тривалість перехідного процесу, у другому — картина зворотна.
Див. також
Література
- Іванов А. О. Теорія автоматичного керування: Підручник. — Дніпропетровськ: Національний гірничий університет. — 2003. — 250 с.
- Енциклопедія кібернетики. тт. 1, 2. — К.: Головна редакція УРЕ, 1973. — 584 с.
- Папушин Ю. Л., Білецький В. С. Основи автоматизації гірничого виробництва. — Донецьк : Східний видавничий дім, 2007. — 168 с. — ISBN 978-966-317-004-6.