Функція невизначеності
В обробці сигналів імпульсного та ехолокатора, функція невизначеності це двовимірна функція затримки часу та Доплеровської частоти яка показує спотворення поверненого імпульса відповідно до узгодженого фільтра[1] приймача (зазвичай використовується у РЛС зі стисненням імпульсу). Функція невизначеності визначається властивостями імпульсу і узгодженого фільтра, а не за якимось вибірковим сценарієм.

Існує багато визнаень функції невизначеності. Деякі належать до вузькосмугових сигналів, інші підходять для опису затримки розповсюдження та відношень Доплера широкосмугових сигналів. Зазвичай тлумачення функції невизначеності подається як величина в квадраті з інших визначень (Weiss[2]). Для заданого комплексного імпульсу в основній смузі , вузькосмугова функція невизначеності задається як:


де * — це спряжені числа, а — це уявна одиниця. Зазначимо, що при нульовому ефекті Доплера це зводиться до автокореляційної функції . Більш стислий шлях представлення функції невизначеності складається з дослідження одновимірної нульової затримки та нульових Доплерівських «зрізів», та відповідно. Вихід узгодженого фільтра як функція часу (сигнал можна спостерігати у системі радарів) це скорочення затримки зі сталою частотою заданою цільовою Доплерівскою функцією: .





Зв'язок частотно-часового розподілу
Функція невизначеності відіграє ключову роль в області обробки частотно-часових сигналів, оскільки вона пов'язана з розподілом Вигнера-Віллі на двовимірному перетворенні Фур'є. Це співвідношення має фундаментальне значення для розробки інших частотно-часових розподілів: білінійні частотно-часовиі розподіли отримані двовимірною фільтрацією в області неоднозначності (тобто, функцією невизначеності сигналу). Цей клас розподілу може бути краще пристосований до розглянутих сигналів[3].
Крім того, розподіл невизначеності можна розглядати як короткочасне перетворення сигналу Фур'є з використанням того ж самого сигналу, що і в функції вікна. Це зауваження було використано, щоб визначити розподіл неоднозначності за часом масштаба області, а не в частотно-часовій області[4] .
Широкосмугова функція невизначеності
Широкосмугова функція невизначеності від це:[5]


де це фактор шкали часу прийнятого сигналу відносно до переданого сигналу, заданого як:


для цілі яка рухається з постійною радіальною швидкістю v. Віддзеркалення сигналу представлене зі стисненням (або розтягненням) в часі коефіцієнтом у частотному діапазоні (з масштабуванням амплітуди). Коли швидкість хвилі в середовищі доволі швидша за швидкість цілі, як це часто буває з радарами, це стиснення по частоті наближене зсувом по частоті Δf = fc*v/c .

Ідеальна функція невизначеності
Функція невизначеності інтересу-це двовимірна дельта-функція Дірака або «кнопка креслення» тобто функція яка нескінченна в (0; 0) і ще десь нульова.

Така функція невизначеності буде свого роду неправильним поняттям, вона не матиме жодних невизначеностей взагалі і нульова затримка і нульове Доплерівське скорочення будуть імпульсні. Звичайно ж це не бажано (якщо ціль не матиме Доплеровского зрушення від невідомої швидкості вона зникне з радіолокаційного зображення), однак якщо Доплерівська обробка незалежно виконана, знання точної Доплерівської частоти дозволяє починати без втручання будь-яких інших цілей, які теж не рухаються точно з тією ж швидкістю.
Цей тип функції невизначеності проводиться ідеальним Білим шумом (нескінченна в тривалості і нескінченна в смузі частот).[6] Однак це вимагало б нескінченну силу яку фізично не реалізувати. Не існує ритму , який вироблятиме з функції невизначеності. Існує наближення, однак, навіть шумоподібні сигнали, такі як двійкові фазоманіпулірованні сигнали з використанням послідовності максимальної довжини є найвідомішими виконавцями в цьому відношенні.[7]

Властивості функції невизначеності
(1) Максимальне значення

(2) Симетричність відносно початку відліку

(3) Інваріантність об'єму

(4) Модуляція

(5) Частота енергетичного спектру

Прямокутний імпульс
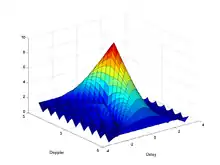
Розглянемо простий прямокутний імпульс тривалості й амплітуди:

де це функція Хевісайда. Вихід узгодженого фільтра даний автокореляцією імпульсу, що є трикутним імпульсом висоти і тривалості . Однак якщо виміряний імпульс має зсув частоти внаслідок доплерівського зсуву, вихід узгодженного фільтра спотворюється в залежності від функції sink. Чим більше доплеровське зміщення тим менший пік в результаті sink і більш важче виявити ціль.



Загалом, прямокутний імпульс це не бажана форма сигналу від стиснення позиції імпульсу, тому що функція автокореляції є занадто короткою за амплітудою, в результаті вона важко виявляє цілі в шумі, і також велика часом, отже важко розрізнити кілька накладних цілей.
ЛЧМ імпульс
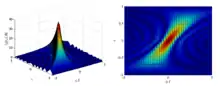
Зазвичай імпульс радара чи гідролокатора — це лінійний частотно-модульований (ЛЧМ) імпульс. Його перевага у більшій смузі пропускання при зберіганні імпульсу короткої тривалості та постійної обвідної. Постійна обвідна ЛЧМ імпульсу має функцію невизначеності подібну до тієї що і в прямокутному імпульсі, за винятком того що вона перекошена у площині delay-Doppler. невеликі Доплеровські невідповідності для ЛЧМ імпульсу не змінюють загальну форму імпульсу і зовсі трішки зменшують амплітуду, але вони виникають щоб пересунути імпульс вчасно. Таким чином некомпенсовані функції Доплера змінюють видимий діапазон цілі; це явище називають діапазонно-Доплерівський зв'язок.
Багатостатична функція невизначеності
Функція невизначеності може бути поширюватись до багатостатичних радарів, які містять множину не розміщених передавачів і/або приймачів (і можуть включати в себе багатостатичний радар як окремий випадок).
Для цих типів радарів, проста лінійна залежність між часом і діапазоном, який існує в моностатичному випадку більше не застосовується, але натомість залежать від конкретної геометрії — тобто відносного розташування передавача, одержувача і цілі. Тому багатостатична функція невизначеності, в основному, з користю визначається як функція двох або тривимірних положень і векторів швидкості для даної мультстатичної геометрії та переданої форми.
Так само, як функція моностатичної невизначеності природно походить від узгодженого фільтра, багатостатична функція невизначеності отримана з відповідного оптимального багатостатичного детектора — тобто того, що максимізує ймовірність виявлення при фіксованій ймовірності помилкової тривоги за допомогою спільної обробки сигналів на всіх приймачах. Природа цього алгоритму виявлення залежить від наявності або відсутності цільових відхилень, що спостерігаються в кожній бістатичній парі в багатостатичній взаємно корельованій системі. Якщо це так, то оптимальний детектор виконує когерентне додавання фаз прийнятих сигналів, які можуть визначити з дуже високою точністю цільове місцезнаходження. Якщо ні, то оптимальний детектор виконує некогерентне підсумовування прийнятих сигналів, яке дає виграш від різниці.[8]
Примітки
- Woodward P. M. Probability and Information Theory with Applications to Radar, Norwood, MA: Artech House, 1980.
- ^ Weiss, Lora G. «Wavelets and Wideband Correlation Processing».IEEE Signal Processing Magazine, pp. 13–32, Jan 1994
- B. Boashash, editor, «Time-Frequency Signal Analysis and Processing – A Comprehensive Reference», Elsevier Science, Oxford, 2003; ISBN 0-08-044335-4
- Shenoy, R.G.; Parks, T.W., "Affine Wigner distributions, " IEEE International Conference on Acoustics, Speech, and Signal Processing, ICASSP-92., pp.185-188 vol.5, 23-26 Mar 1992, doi: 10.1109/ICASSP.1992.226539
- L. Sibul, L. Ziomek, «Generalised wideband crossambiguity function», IEEE International Conference on Acoustics, Speech, and Signal Processing, ICASSP '81.01/05/198105/1981; 6:1239–1242.
- Signal Processing in Noise Waveform Radar By Krzysztof Kulpa (Google Books)
- G. Jourdain and J. P. Henrioux, "Use of large bandwidth-duration binary phase shift keying signals in target delay Doppler measurements, " J. Acoust. Soc. Am. 90, 299—309 (1991).
- T. Derham, S. Doughty, C. Baker, K. Woodbridge, "Ambiguity Functions for Spatially Coherent and Incoherent Multistatic Radar, "IEEE Trans. Aerospace and Electronic Systems (in press).