Хмара точок
Хмара точок (англ. point cloud) — набір даних про точки в деякій системі координат.
У тривимірній системі координат, точки визначаються координатами X, Y та Z, і часто призначаються для представлення зовнішньої поверхні об'єкта.
Хмара точок може бути створена 3D-сканером. Такі пристрої породжують дуже велику кількість точок поверхні об'єкту і часто результатом роботи є хмара точок у вигляді файлу даних. В цьому випадку, хмара точок представляє собою множину точок, отриману при скануванні поверхні.
Результати роботи 3D-сканерів — хмари точок — використовуються з різною метою, зокрема для створення 3D САПР моделей для виробництва деталей, метрології/контролю якості та для використання у чисельних застосунках візуалізації, анімації, рендерінгу та масового індивідуалізованого виробництва.
Хоча хмари точок можуть бути безпосередньо відрендерені та перевірені[1][2], проте зазвичай не придатні для безпосереднього використання у більшості 3D-застосунків. Тому вони, як правило, перетворюються в моделі з полігональною або трикутною сіткою, у NURBS модель або САПР модель за допомогою процесу так званої реконструкції поверхні.
Існує багато методів перетворення хмари точок у 3D поверхню. Зокрема, у статті М. Берже і групи авторів наведена порівняльна таблиця з 35 методів відтворення поверхні з хмари точок.[3] Деякі наближення, такі як тріангуляція Делоне, Альфа-форма та метод поворотних куль (англ. ball pivoting)[4], будують трикутну або полігональну сітку по вже наявним вершинам хмари точок, а інші наближення будують об'ємні таблиці відстаней або реконструюють неявну поверхню за допомогою алгоритму крокуючих кубиків (англ. marching cubes).[5]
Одним з застосунків, де хмари точок використовуються безпосередньо, є індустріальна метрологія та перевірка якості з використанням промислової комп'ютерної томографії. Хмара точок, отримана в результаті тривимірного сканування готового промислового виробу, може бути приведена у відповідність з CAD-моделлю цього виробу або навіть іншої хмарі точок, і в результаті порівняння можна виявити відмінності між проектними і фактичними параметрами. Ці відмінності можуть відображатися у вигляді кольорових карт, на яких місця і ділянки відхилень між фактичною і формальною моделлю можуть бути автоматично виділеними певним індикатором. Геометричні розміри та допуски також можуть бути безпосередньо отримані з хмари точок.
Хмари точок можуть використовуватися для представлення і візуалізації об'ємних даних, наприклад, в галузі медичної візуалізації. Завдяки використанню хмар точок в таких задачах досягається мультісемплінг і стиснення даних.[6]
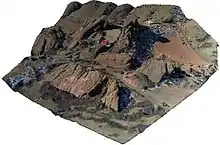
У геоінформаційних системах, хмари точок є одним з джерел, які використовуються для створення цифрової моделі рельєфу місцевості.[7] Хмари точок також використовуються для створення цифрових моделей міської місцевості.[8]
Програмна технологія під назвою «Unlimited Detail», яка використовує хмари точок для рендеринга в реальному часі, розробляється австралійською компанією Euclideon з 2003 року.[9][10]
See also
- Euclideon — 3D рушій, який використовує пошуковий алгоритм в хмарі точок для рендерінгу зображень
- MeshLab — вільний застосунок для обробки хмар точок і побудови по ним полігональних сіток
- CloudCompare — вільний застосунок для перегляду, редагування та обробки хмар точок з високою щільністю
- Point Cloud Library — комплексна BSD бібліотека з відкритим кодом для n-мірних хмар точок та 3D геометричної обробки
- Список програм для роботи з хмарами точок
Примітки
- Levoy, M. and Whitted, T., The use of points as a display primitive.. Technical Report 85-022, Computer Science Department, University of North Carolina at Chapel Hill, January, 1985
- Rusinkiewicz, S. and Levoy, M. 2000. QSplat: a multiresolution point rendering system for large meshes. In Siggraph 2000. ACM, New York, NY, 343—352. DOI= http://doi.acm.org/10.1145/344779.344940
- Berger, M., Tagliasacchi, A., Seversky, L. M., Alliez, P., Guennebaud, G., Levine, J. A., Sharf, A. and Silva, C. T. (2016), A Survey of Surface Reconstruction from Point Clouds. Computer Graphics Forum. Архів оригіналу за 21 грудня 2016. Процитовано 19 січня 2017.
- Bernardini, Fausto; Mittleman, Joshua; Rushmeier, Holly; Silva, Cláudio; Taubin, Gabriel (1999). The Ball-Pivoting Algorithm for Surface Reconstruction. IEEE Transactions on Visualization and Computer Graphics 5: 349–359. doi:10.1109/2945.817351.
- Meshing Point Clouds A short tutorial on how to build surfaces from point clouds
- Sitek et al. «Tomographic Reconstruction Using an Adaptive Tetrahedral Mesh Defined by a Point Cloud» IEEE Trans. Med. Imag. 25 1172 (2006)
- From Point Cloud to Grid DEM: A Scalable Approach
- K. Hammoudi, F. Dornaika, B. Soheilian, N. Paparoditis. Extracting Wire-frame Models of Street Facades from 3D Point Clouds and the Corresponding Cadastral Map. International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences (IAPRS), vol. 38, part 3A, pp. 91–96, Saint-Mandé, France, 1–3 September 2010.
- Krishan Sharma (26 серпня 2010 року). Local company Unlimited Detail promises just that... (англ.). Atomic MPC. Архів оригіналу за 13 серпня 2011. Процитовано 22 січня 2017.
- Priya Ganapati (22 квітня 2010 года). New Graphics Tech Promises Speed, Hyperrealism (англ.). Wired. Архів оригіналу за 13 серпня 2011. Процитовано 22 січня 2017.
Посилання
- Remondino Fabio (24-28 лютого 2003 року). From point cloud to surface: the modeling and visualization problem (PDF). Федеральна вища технічна школа Цюриха (англ.). Institute of Geodesy and Photogrammetry, Swiss Federal Institute of Technology. Процитовано 22 січня 2017.