Хода людини
Хода людини — найбільш природна локомоція людини; являє собою автоматизований руховий акт, який відбувається в результаті складної координованої діяльності скелетних м'язів тулуба та кінцівок. Є найбільш доступним видом фізичного навантаження.
Інші визначення

Існують і інші визначення, що характеризують цю локомоцію:
- Послідовність рефлекторно контрольованих падінь. Ходу образно описують як «кероване падіння». При кожному кроці людина нахиляється вперед і починає падіння, якому перешкоджає висунута вперед нога. Після того як вона торкається землі, на неї переноситься вага тіла, коліно прогинається, амортизуючи падіння, і випрямляється, повертаючи тіло на вихідну висоту.
- Ходу розглядають з позиції моделі прямого й зворотнього маятника, розглядаючи сегменти кінцівок і тіло, як систему фізичних маятників.
- За образним висловом Бернштейна, який об'єднав біомеханіку й нейрофізіологію рухового апарату в єдину науку фізіологію рухів, хода — це:
- «…синергії, що охоплюють всю мускулатуру й весь руховий апарат з верху до низу»;
- «…циклічний акт - тобто рух, у якому періодично повторюються знову й знову одні й ті ж фази».
- Хода — це рухова дія, результат реалізації рухового стереотипу, комплексу безумовних та умовних рефлексів
- Хода — це рухова навичка, яка являє собою ланцюг послідовно закріплених умовно рефлекторних рухових дій, які виконуються автоматично без участі свідомості.
- Творець аеробіки Кеннет Купер називав ходу різновидом аеробного навантаження, формою оздоровлювального тренування.
Види ходи
| Як звичайний локомоції: | Як спортивний і оздоровчий локомоції: | як воєнно-прикладний локомоції |
|---|---|---|
| марширування (організована хода, вправа в помірній ході та правильно побудованими рядами)[1] |
Завдання Ходи
Завдання ходи як важливої локомоторної функції:
- Безпечне лінійне поступове переміщення тіла вперед (головна задача).
- Утримання вертикального балансу, запобігання падінню під час руху.
- Збереження енергії, використання мінімальної кількості енергії за рахунок її перерозподілу протягом циклу кроку.
- Забезпечення плавності пересування (різкі рухи можуть бути причиною пошкодження).
- Адаптація ходи для усунення хворобливих рухів і зусиль.
- Збереження ходи при зовнішніх збурювальних впливах або при зміні плану рухів (стабільність ходи).
- Стійкість до можливих біомеханічних порушень.
- Оптимізація пересування, перш за все, підвищення ефективності безпечного переміщення центру ваги з найменшою витратою енергії.
Параметри ходи
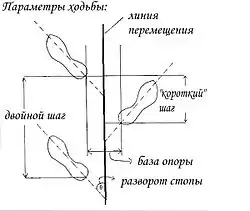
Найбільш загальними параметрами, котрі характеризують ходу, є: лінія переміщення центру мас тіла, довжина кроку, довжина подвійного кроку, кут розвороту стопи,база опори, швидкість переміщення і ритмічність.
- База опори — це відстань між двома паралельними лініями, проведеними через центри опори п'ят перпендикулярно лінії переміщення.
- Короткий крок — це відстань між точкою опори п'яти однієї ноги й центром опори п'яти контралатеральної ноги.
- Розворот стопи — це кут, утворений лінією переміщення і лінією, що проходить через середину стопи - центр опори п'яти й точку між першим і другим пальцем.
- Ритмічність ходи — відношення тривалості фази перенесення однієї ноги до тривалості фази перенесення іншої ноги.
- Швидкість ходи — число великих кроків у одиницю часу. Вимірюється в одиницях: кроків за хвилину або кілометрів на годину. Для дорослого — 113 кроків за хвилину.
Біомеханіка ходи
Ходу при різних захворюваннях вивчає розділ медицини — клінічна біомеханіка; ходу як засіб досягнення спортивного результату або підвищення рівня фізичної підготовленості вивчає розділ фізичної культури — спортивна біомеханіка. Ходу вивчають багато інших наук: комп'ютерна біомеханіка, театральне та балетне мистецтво, військова справа.
Основою для вивчення всіх біомеханічних наук є біомеханіка ходи здорової людини в природних умовах.
Ходу розглядають з позиції єдності біомеханічних і нейрофізіологічних процесів, які визначають функціонування локомоторної системи людини.
Біомеханічна структура ходи включає такі підструктури:
- просторову;
- часову;
- кінематичну;
- динамічну;
- іннерваційних.
Просторова структура ходи (довжина кроку, база кроку, кут розвороту стопи) визначається в результаті проведення іхнометрії. Іхнометрія дозволяє реєструвати точки дотику стопи з опорою в просторі. На цій підставі визначають просторову структуру ходи.
Часова структура ходи зазвичай заснована на аналізі результатів подографії. Подографія дозволяє реєструвати моменти контакту різних відділів стопи з опорою. На цій підставі визначають тимчасові фази кроку.
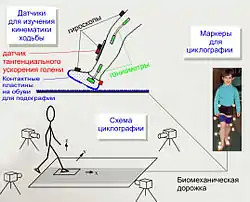
Кінематику ходи вивчають з використанням контактних і безконтактних датчиків вимірювання кутів в суглобах (гоніометрія), а також із застосуванням гіроскопів — приладів, що дозволяють визначити кут нахилу сегмента тіла щодо лінії гравітації. Важливим методом у дослідженні кінематики ходи є методика циклографії — метод реєстрації координат точок, що світяться, розташованих на сегментах тіла.
Динамічні характеристики ходи вивчають із застосуванням динамографічної (силової) платформи або тензометричних устілок (динамометрія). При опорі силову платформу реєструють вертикальну реакцію опори, а також горизонтальні її складові. Для реєстрації тиску окремих ділянок стопи застосовують датчики тиску або тензодатчики, вмонтовані в підошву взуття.
Фізіологічні параметри ходи реєструють за допомогою методики електроміографії — реєстрації біопотенціалів м'язів. Електроміографія, зіставлена з даними методик оцінки часової характеристики, кінематики та динаміки ходи, є основою біомеханічного аналізу ходи.
Часова структура ходи
Основний метод дослідження часової структури — метод подографіЇ. Наприклад, дослідження ходи із застосуванням найпростішої, двоконтактної електроподографії полягає в використанні контактів у підошві спеціального взуття, які замикаються при опорі на біомеханічну доріжку. Період замикання контакту реєструється й аналізується приладом: замикання заднього контакту — опора на п'яту, замикання заднього і переднього — опора на всю стопу, замикання переднього контакту — опора на передній відділ стопи. На цій підставі будують графік тривалості кожного контакту для кожної ноги.
Кінематика ходи
Проводячи кінематичний аналіз ходи, перш за все визначають переміщення загального центру мас тіла та кутові переміщення в великих суглобах нижніх кінцівок і в суглобах стопи.
Кінематичний аналіз проводять, досліджуючи ці рухи в трьох основних анатомічних площинах тіла: в сагітальній, у горизонтальній та у фронтальній площині. Рухи сегментів тіла співвідносять із фазами тимчасової характеристики ходи.
Реєстрація рухів сегментів тіла проводиться як контактним, так і безконтактним методом. Досліджують лінійні та кутові переміщення, швидкість і прискорення.
Основні методи дослідження: циклографія, гоніометрія та оцінка руху сегмента тіла за допомогою гіроскопа.
Метод циклографії дозволяє реєструвати зміну координат точок тіла, що світяться в системі координат.
Гоніометрія — зміна кута ноги прямим методом із застосуванням кутових датчиків і неконтактним за даними аналізу циклограми.
Крім того, застосовують спеціальні датчики гіроскопи й акселерометри. Гіроскоп дозволяє реєструвати кут повороту сегмента тіла, до якого він прикріплений, навколо однієї з осей обертання, умовно названої віссю відліку. Зазвичай гіроскопи застосовують для оцінки руху тазового та плечового пояса, при цьому послідовно реєструють напрям руху в трьох анатомічних площинах — фронтальній, сагітальній і горизонтальній.
Оцінка результатів дозволяє визначити в будь-який момент кроку кут повороту таза та плечового пояса в сторону, вперед або назад, а також поворот навколо поздовжньої осі. У спеціальних дослідженнях застосовують акселерометри для вимірювання в даному випадку тангенціального прискорення гомілки.
Для дослідження ходи використовують спеціальну біомеханічну доріжку, вкриту електропровідним шаром.
Важливу інформацію отримують при проведенні традиційного в біомеханіці циклографічного дослідження, яке, як відомо, засноване на реєстрації методом відео- кінофотозйомки координат маркерів, що світяться, розташованих на тілі випробуваного.
Динаміка ходи
Динаміка ходи не може бути вивчена методом прямого виміру сили, яка продукується працюючими м'язами. До теперішнього часу не доступно жодних певних для широкого використання методик вимірювання моменту сили живого м'яза, сухожилля або суглоба. Хоча слід зазначити, що прямий метод, метод імплантації датчиків сили й тиску безпосередньо в м'яз або сухожилля застосовується у спеціальних лабораторіях. Прямий метод дослідження обертального моменту здійснюється також при використанні датчиків у протезах нижніх кінцівок і в ендопротезах суглобів.
Уявлення про сили, які впливають на людину при ході, може бути отримано або у визначенні зусилля в центрі мас всього тіла, або шляхом реєстрації опорних реакцій.
Практично сили м'язової тяги при циклічному русі можна оцінити тільки вирішуючи завдання зворотної динаміки. Тобто знаючи швидкість і прискорення рухомого сегмента, а також його масу, і центр мас, ми можемо визначити силу, яка викликає цей рух, слідуючи за другим законом Ньютона (сила прямо пропорційна масі тіла на прискорення).
Реальні сили при ході, які можна виміряти, це сили реакції опори. Зіставлення сили реакції опори й кінематики кроку дозволяє оцінити величину крутного моменту суглоба. Розрахунок крутного моменту м'яза може бути проведений, виходячи з зіставлення кінематичних параметрів, точки прикладання реакції опори та біоелектричної активності м'яза.
Сила реакції опори
Сила реакції опори — сила, що діє на тіло з боку опори. Ця сила дорівнює й протилежна тій силі, яку надає тіло на опору. Якщо при стоянні сила реакції опори дорівнює вазі тіла, то при ході до цієї сили додаються сила інерції й сила, створювана м'язами при відштовхуванні від опори.
Для дослідження сили реакції опори зазвичай застосовують динамографічну (силову) платформу, яка вмонтована в біомеханічну доріжку. При опорі в процесі ходи на цю платформу реєструють виникають сили — сили реакції опори. Силова платформа дозволяє реєструвати результуючий вектор сили реакції опори.
Динамічна характеристика ходи оцінюється шляхом дослідження опорних реакцій, що відображають взаємодію сил, які беруть участь в побудові локомоакта: м'язових, гравітаційних та інерційних. Вектор опорної реакції в проекції на основні площини розкладається на три складові: вертикальну, поздовжню і поперечну. Ці складові дозволяють судити про зусилля, пов'язані з вертикальним, поздовжнім і поперечним переміщенням загального центру мас.
Сила реакції опори включає в себе вертикальну складову, діючу в напрямку вгору-вниз, поздовжню складову, спрямовану вперед-назад по осі Y, і поперечну складову, спрямовану медіально-латерально по осі X. Це похідна від сили м'язів, сили гравітації та сили інерції тіла.
Вертикальна складова вектора опорної реакції
Графік вертикальної складової опорної реакції при ході в нормі має вигляд плавної симетричної двогорбої кривої. Перший максимум кривої відповідає інтервалу часу, коли в результаті перенесення ваги тіла на опорну ногу відбувається передній поштовх; другий максимум (задній поштовх) відображає активне відштовхування ноги від опорної поверхні та викликає просування тіла вгору, вперед і в сторону опорної кінцівки. Обидва максимуми розташовані вище рівня ваги тіла і становлять відповідно при повільному темпі приблизно 100 % від ваги тіла, при довільному темпі — 120 %, при швидкому — 150 % і 140 %.
Мінімум опорної реакції розташований симетрично між ними нижче лінії ваги тіла. Виникнення мінімуму обумовлено заднім поштовхом другої ноги і подальшим її перенесенням; при цьому з'являється сила, спрямована вгору, яка вираховується з ваги тіла. Мінімум опорної реакції при різних темпах становить від ваги тіла відповідно: при повільному темпі — приблизно 100 %, при довільному темпі 70 %, при швидкому — 40 %.
Таким чином, загальна тенденція при збільшенні темпу ходи полягає в зростанні значень переднього та заднього поштовхів і зниженні мінімуму вертикальної складової опорної реакції.
Поздовжня складова вектора опорної реакції
Поздовжня складова вектора опорної реакції — зрізувальна сила, що рівна силі тертя, яка утримує стопу від переднього та заднього ковзання. Поздовжня складова характеризується аналогічною тенденцією збільшення переднього та заднього поштовхів при підвищенні темпу ходи.
Поперечна складова вектора опорної реакції
Поперечна (медіолатеральна) складова вектора опорної реакції так само, як і поздовжня, породжена силою тертя.
Графік поперечної складової опорної реакції за формою нагадує перевернутий графік вертикальної складової. Крива також має в своєму розпорядженні два максимуми, приурочені до фаз переднього та заднього поштовхів і спрямованими медіально. Однак на самому початку циклу виявлено ще один максимум, який має протилежний зміст. Це короткий період опори на зовнішній відділ п'яти.
При збільшенні темпу ходи всі максимуми зростають, їх значення від ваги тіла становлять: при повільному темпі — 7 % і 5 %, при довільному темпі — 9 % і 8 %, при швидкому — 13 % і 7 %. Таким чином, чим вище темп ходи, тим більше сила і, відповідно, енергія, яка витрачається на подолання сили тертя. Реакція опори — це сила, прикладена до стопи. Вступаючи в контакт із поверхнею опори, стопа випробовує тиск з боку опори, рівний і протилежний тому, який стопа надає на опору. Це і є реакція опори стопи. Ці сили нерівномірно розподіляються по контактній поверхні. Як і всі сили такого роду, їх можна зобразити у вигляді результуючого вектора, який має величину і точку прикладання.
Точка прикладання вектора реакції опори на стопу інакше називається центром тиску. Це важливо для того, щоб знати, де знаходиться точка докладання зусиль, які діють на тіло з боку опори. При дослідженні на силовій платформі ця точка називається точкою прикладання сили реакції опори. Траєкторія сили реакції опори в процесі ходи зображується у вигляді графіка: «залежність величини сили реакції опори від часу опорного періоду». Графік являє собою переміщення вектора реакції опори під стопою.
Нормальний патерн - траєкторія руху реакції опори при нормальній ході - являє собою переміщення від зовнішнього відділу п'яти уздовж зовнішнього краю стопи в медіальному напрямку до точки між першим і другим пальцем стопи.
Траєкторія переміщення варіабельна і залежить від темпу і типу ходи, від рельєфу поверхні опори, від типу взуття, а саме - від висоти каблука і від жорсткості підошви. Патерн реакції опори багато в чому визначається функціональним станом м'язів нижньої кінцівки й іннерваційною структурою ходи.
Іннерваційна структура ходи
Визначення зовнішніх обертальних моментів суглобів, а головним чином - нижньої кінцівки, є на сьогодні єдиним об'єктивним методом оцінки внутрішнього крутного моменту, який визначається м'язовим зусиллям в різні фази ходи (поряд з іншими факторами: еластичність, зв'язок сухожиль, геометрія суглобової поверхні). А ось про розподіл зусиль різних груп м'язів, про просторово-тимчасову характеристику роботи м'язів судять за даними електроміографічного дослідження. Ці дані співвідносять з тимчасовою і силовою характеристикою кожної фази кроку й отримують досить повне уявлення про роботу основного двигуна людини і про управління цим процесом.
Багатоканальна міографія з комп'ютерною обробкою отриманого сигналу є традиційним об'єктивним методом вивчення іннерваційної біомеханічної структури ходи.
У ході беруть участь багато м'язів і груп м'язів, проте для ходи найбільш значущими м'язами є м'язи-розгиначі (трицепс гомілки, чотириглавий м'яз стегна, великий і середній сідничний), і м'язи-згиначі.
Робота м'язів-розгиначів є основним силовим джерелом для переміщення загального центру мас. Активність м'язів-розгиначів обумовлена також необхідністю пригальмовування руху сегментів в фазу переносу. Скорочення м'язів-згиначів направлене на корекцію положення або руху кінцівки в переносну фазу. При звичайних умовах ходи коригувальна функція м'язів мінімальна.
Прямий м'яз у складі чотириголового стегна забезпечує амортизацію переднього поштовху і подальше розгинання в колінному суглобі в фазу опори. Великий сідничний м'яз забезпечує розгинання стегна у фазу опори, литковий м'яз — відштовхування від опорної поверхні та вертикальне переміщення загального центру мас.
Підколінні згиначі забезпечують регуляцію швидкості руху в колінному суглобі, а передній великогомілковий м'яз — корекцію положення стопи.
Чергування різних режимів м'язової діяльності містить у собі певний біомеханічний сенс: під час поступової роботи збільшується напруга м'язів і їх рефлекторна активація, кінетична енергія переходить в потенціальну енергію пружної деформації м'язів. При цьому ефективність роботи м'язів перевищує в 2-9 разів ефективність їх доланя роботи. Під час переборювального режиму роботи м'яз виконує механічну роботу, при цьому потенціальна енергія пружної деформації м'язів перетворюється в кінетичну енергію всього тіла або його окремих частин.
На перший погляд, переборювальний режим роботи м'язів зумовлює виникнення та прискорення рухів, а поступальний режим — їх уповільнення або зупинку. Насправді поступовий режим діяльності м'язів має більш глибокий зміст. "Коли тіло людини при ході вже набрало відому швидкість, гальмування рухів окремої ланки призводить до перерозподілу кінетичного моменту, а отже, і до прискорення рухів суміжної ланки. Завдяки багатоланковій структурі рухового апарату такий опосередкований спосіб управління рухами нерідко виявляється енергетично більш вигідним, ніж прямий, бо дозволяє краще утилізувати раніше накопичену кінетичну енергію ".
Основні біомеханічні фази
Аналіз кінематики, опорних реакцій і роботи м'язів різних частин тіла переконливо показує, що протягом циклу ходи відбувається закономірна зміна біомеханічних подій. «Хода здорових людей, не дивлячись на ряд індивідуальних особливостей, має типову і стійку біомеханічну й іннерваційну структуру, тобто певну просторово-часову характеристику рухів і роботи м'язів».
При ході людина послідовно спирається то на одну, то на іншу ногу. Ця нога називається опорною. Контралатеральна нога в цей момент виноситься вперед (це — переносна нога). Період перенесення ноги називається «фаза переносу». Повний цикл ходи — період подвійного кроку — складається для кожної ноги з фази опори і фази перенесення кінцівки. В опорний період активне м'язове зусилля кінцівок створює динамічні поштовхи, що передають центру тяжіння тіла прискорення, необхідне для поступального руху. При ході в середньому темпі фаза опори триває приблизно 60 % від циклу подвійного кроку, фаза переносу — приблизно 40 %.
Початком подвійного кроку прийнято вважати момент контакту п'яти з опорою. У нормі приземлення п'яти здійснюється на її зовнішній відділ. З цього моменту ця (права) нога вважається опорною. Інакше цю фазу ходи називають передній поштовх — результат взаємодії сили тяжіння людини, що рухається, з опорою. На площині опори при цьому виникає опорна реакція, вертикальна складова якої перевищує масу тіла людини. Тазостегновий суглоб знаходиться в положенні згинання, нога випрямлена в колінному суглобі, стопа в положенні легкого тильного згинання.
Наступна фаза ходи — опора на всю стопу. Вага тіла розподіляється на передній і задній відділ опорної стопи. Інша - в даному випадку ліва - нога зберігає контакт з опорою. Тазостегновий суглоб зберігає положення згинання, коліно підгинається, пом'якшуючи силу інерції тіла, стопа приймає середнє положення між тильним і підошовним згинанням. Потім гомілка нахиляється вперед, коліно повністю розгинається, центр мас тіла просувається вперед. У цей період кроку переміщення центру мас тіла відбувається без активної участі м'язів, за рахунок сили інерції.
Опора на передній відділ стопи. Приблизно через 65 % часу подвійного кроку, в кінці інтервалу опори, відбувається відштовхування тіла вперед і вгору за рахунок активного підошовного згинання стопи — реалізується задній поштовх. Центр мас переміщається вперед в результаті активного скорочення м'язів.
Наступна стадія — фаза переносу – характеризується відривом ноги та переміщенням центру мас під впливом сили інерції. В середині цієї фази всі великі суглоби ноги знаходяться в положенні максимального згинання. Цикл ходи завершується моментом контакту п'яти з опорою.
У циклічній послідовності ходи виділяють моменти, коли з опорою стикається тільки одна нога («одноопорний період») і обидві ноги, коли винесена вперед кінцівка вже торкнулася опори, а розташована позаду ще не відірвалася («двоопорна фаза»). Зі збільшенням темпу ходи «двоопорні періоди» коротшають і зовсім зникають при переході в біг. Таким чином, за кінематичними параметрами хода від бігу відрізняється наявністю двоопорної фази.
Ефективність ходи
Основний механізм, що визначає ефективність ходи, — це переміщення загального центру мас.
Переміщення загального центру мас (ЗЦМ) являє собою типовий синусоїдальний процес з частотою, що відповідає подвійному кроку в медіолатеральному напрямку, і з подвоєною частотою в передньо-задньому і вертикальному напрямку. Переміщення центру мас визначають традиційним циклографічним методом, позначивши загальний центр мас на тілі випробуваного точками, що світяться.
Однак, знаючи вертикальну складову сили реакції опори, можна зробити простіше, застосувавши математичний спосіб. Із законів динаміки прискорення вертикального переміщення дорівнює відношенню сили реакції опори до маси тіла, швидкість вертикального переміщення дорівнює відношенню добутку прискорення на інтервал часу, а саме переміщення — добутку швидкості на час. Знаючи ці параметри, можна легко розрахувати кінетичну та потенціальну енергію кожної фази кроку.
Криві потенціальної та кінетичної енергії є хіба що дзеркальним відображенням одне одного, і мають фазовий зсув приблизно в 180°.
Відомо, що маятник має максимум потенціальної енергії в найвищій точці і перетворює її в кінетичну, відхиляючись вниз. При цьому деяка частина енергії витрачається на тертя. Під час ходи, вже на самому початку періоду опори, як тільки ОЦМ починає підніматися, кінетична енергія нашого руху перетворюється в потенціальну, і навпаки, переходить в кінетичну, коли ОЦМ опускається. Таким чином, зберігається близько 65 % енергії. М'язи повинні постійно компенсувати втрату енергії, яка становить близько тридцяти п'яти відсотків. М'язи включаються для переміщення центру мас з нижнього положення у верхнє, заповнюючи втрачену енергію.
Ефективність ходи пов'язана з мінімізацією вертикального переміщення загального центру мас. Однак збільшення енергетики ходи нерозривно пов'язане зі збільшенням амплітуди вертикальних переміщень, тобто при збільшенні швидкості ходи і довжини кроку неминуче збільшується вертикальна складова переміщення центру мас.
Протягом опорної фази кроку спостерігаються постійні компенсувальні рухи, які мінімізують вертикальні переміщення та забезпечують плавність ходи.
До таких рухів відносять:
- поворот таза щодо опорної ноги;
- нахил таза в бік неопорної кінцівки;
- підгинання коліна опорної ноги при підйомі ОЦМ;
- розгинання при опусканні ОЦМ.
Примітки
- Марш // Малый энциклопедический словарь Брокгауза и Ефрона : в 4 т. — СПб., 1907—1909. (рос.)
Див. також
- Постава — звичне положення тіла людини в спокої і русі, в тому числі при ході.
- Хода оздоровча
- Ходіння босоніж (барефутінг)
- Хода на лижах
- Стояння
- Ортоградна поза
- Стрибок у висоту
- Стійкий транспорт
- Брахіація