Гіроскоп
Гіроско́п (від дав.-гр. γῦρος — «обертання» і σκοπέω — «дивлюся, бачу») — пристрій, здатний реагувати на зміну орієнтації основи, на якій його встановлено, відносно інерціального простору.
Опис
Термін уперше введений Жаном Бернаром Леоном Фуко в його доповіді 1852 року Французькій академії наук. Доповідь було присвячено способам експериментального виявлення обертання Землі в інерціальному просторі. Цим і зумовлено назву «гіроскоп».
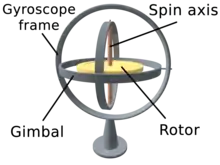
У більш традиційному розумінні гіроскоп — пристрій, що містить швидкообертове тверде тіло, яке має три обертальні ступені вільності, тобто можливість обертання навколо трьох взаємно-перпендикулярних осей. Усім відома дитяча іграшка — дзиґа, яка являє собою приклад гіроскопа.
Вісь у тілі (роторі) гіроскопа, навколо якої гіроскопу надано швидкого обертання, називають головною віссю гіроскопа або віссю власного обертання (англ. spin axis).
Гіроскоп має три характерні властивості:
- стійкість напрямку головної осі в інерціальному просторі, тобто здатність гіроскопа ефективно опиратися зовнішнім діям, які прагнуть змінити напрямок його головної осі у просторі (інерціальному);
- прецесії: якщо на гіроскоп діє постійний момент сил, який прагне змінити напрямок головної осі, то головна вісь набуває обертання з постійною кутовою швидкістю у площині, яка проходить через головну вісь і вісь прикладеного моменту сил; швидкість цього обертання (прецесії) обернено пропорційна кутовій швидкості власного обертання гіроскопа;
- нутації: якщо на гіроскоп подіяв ударний імпульс сил, який прагне змістити напрямок його головної осі, то головна вісь починає здійснювати коливання (з великою частотою і вельми малою амплітудою), описуючи у просторі конічну поверхню з вершиною у точці підвісу; частота нутації прямо, а амплітуда нутації обернено пропорційні величині власної кутової швидкості гіроскопа.
Усі ці властивості суттєво визначаються величиною кутової швидкості власного обертання гіроскопа та його моментом інерції.
Сучасні гіроскопи ґрунтуються на вимірюванні вібраційних та хвильових параметрів резонаторів різних типів (механічних, оптичних тощо). Принципи їхньої дії ґрунтуються на ефектах Саньяка, Фермі, Брайана (інерції стоячих хвиль у пружному кільці та у осесиметричних оболонках), ефекті інерції поляризації пружних хвиль зсуву тощо.
Прилади, що використовують властивості гіроскопа, застосовуються в ряді галузей науки і техніки, зокрема в системах навігації і системах керування рухомих транспортних засобів (суден, літальних і космічних апаратів, ракет, торпед тощо).
Історія
Перші свідчення про дзиґу та її незвичайні властивості відомі з давніх-давен. До нас дійшли такі іграшки, виготовлені в Китаї у третьому тисячолітті до нової ери. Властивості дзиґи — її стійкість (незмінність напрямку у просторі осі власного обертання і надзвичайна опірність зовнішнім діям) і прецесія (повільне обертання осі власного обертання дзиґи під дією моменту сил) — стали підґрунтям створення на її основі цілої низки приладів і пристроїв, які називають гіроскопічними.
Першу, згадану в літературі, спробу використати властивості дзиги у практичних цілях зроблено у 1742—1743 рр., коли англійський механік Д. Серсон створив прилад, який мав під час вимірювання висот світил секстантом вказувати площину горизонту. У цьому приладі перевернута металева чаша, що спиралася на шпильку, приводилася в обертання шнуром, а відполіроване плоске дно чаші прислуговувалося як площина горизонту. Хоча перші випробування були успішними, проте цей прилад не набув поширення через трагічні обставини, за яких загинув і корабель, і сам винахідник.
Реалізовано первісну ідею Серсона було тільки наприкінці XIX ст. у приладі французького винахідника Флеріє. Відрізнявся морський гірогоризонт Флеріє від приладу Серсона головним чином тим, що такий самий ротор приводився в обертання стислим повітрям від ручного насоса, а для спостереження площини горизонту на верхній поверхні ротора були діаметрально розміщені дві лінзи, на які нанесено штрихи, перпендикулярні осі ротора. Завдяки цьому спостереження в оптичну трубу цих лінз давало змогу за рухом штрихів визначити положення площини горизонту.
У 1898 р. лейтенант австрійського флоту Леон Обрі винайшов гіроскопічний напрямний апарат для саморушійної міни (торпеди) Уайтхеда. Цей апарат застосовували задля забезпечення руху торпеди, що рухається у воді, за заданим курсом. У торпедній справі прилади такого типу набули широкого застосування і надалі безперервно вдосконалювалися. Без суттєвих змін прилад Обрі використовували аж до 50-х років XX ст. у флотах майже всіх країн світу. Це перше вдале застосування гіроскопічного приладу на практиці.
Ще більш поширеним застосуванням гіроскопа було створення гіроскопічного компаса. Німецький фізіолог і географ Г. Аншютц-Кемпфе у 1908 р. побудував перший гіроскопічний компас, а в березні-квітні 1909 р. цей гірокомпас успішно пройшов випробування на лінкорі «Дойчланд». Теоретичну частину проекту виконував Макс Шюлер. У 1910 р. він опрлюднив винайдену ним умову незбурюваності маятникового гіроскопічного компаса (умову Шюлера). Коли гірокомпас Аншютца вже був прийнятий на озброєння германського і британського флотів, виявилося, що його показання містять недопустимі похибки, коли судно йшло «інтеркардинальним» курсом (тобто під 45 градусів до сторін світу) та одночасно зазнавало значної бортової хитавиці. Тому гірокомпаси були повернуті виробнику з рекламаціями, перший гірокомпас Аншютца прозвали «гірокомпасом для доброї погоди». Це змусило М. Шюлера більш уважно вивчити вплив хитавиці на роботу приладу, внаслідок чого був розроблений новий тригіроскопний гірокомпас. Уже в 1913 р. тригіроскопний гірокомпас Аншютца був випробуваний у морі і показав добрі результати.
У період 1915—1927 рр. були побудовані і застосовувалися на флоті і в авіації гіроскопічні вертикалі (гірогоризонти), найкращими зразками яких були гіровертикаль Аншютца з неперетинними осями карданового підвісу, а також гіровертикалі Сперрі — з повітродувною корекцією і з кульовим гіроскопом у газодинамічному підвісі. У 1927 р. фірма «Аншютц» випустила новий двороторний гірокомпас, що став згодом основою для створення багатьох інших приладів, які чудово зарекомендували себе у практиці судноплавства.
Із розвітком флоту постало актуальне завдання створення точного штучного горизонту, який би незначно збурювався під час маневрування корабля. Г. Аншютц-Кемпфе зробив ще один крок у напрямі надання незбурюваності своєму компасу — перебудував двороторний компас у такий спосіб, щоб у ньому умова Шюлера виконувалася і щодо коливань маятника навколо полуденної лінії. В результаті у 1931 р. був створений гірогоризонткомпас. Його призначення — вимірювати кути хитавиці і рискання корабля для керування стрільбою по невидимих цілях.
На флоті, в авіації, ракетній і космічній техніці набули поширення прилади, що ґрунтуються на властивості вільного астатичного гіроскопа зберігати напрямок осі власного обертання відносно «нерухомих зірок». В 1940-х роках був створений комплект із двох вільних гіроскопів і застосований для керування польоту балістичної ракети V-2 (Німеччина). Наразі комплект з трьох вільних високопрецезійних гіроскопів типу «зірка у пляшці» використовується для псевдоастрономічного визначення положення на поверхні Землі підводних кораблів під час довготривалого підводного плавання.
Уже на початку XX ст. були зроблені спроби використати гіроскоп для кутової стабілізації транспортних засобів, тобто для утворення моментів сил, які б утримувавали те чи інше тіло (судно, вагон) у бажаному положенні. Першим був гіроскопічний заспокоювач бортової хитавиці судна, запропонований у 1904 р. німецьким інженером О. Шліком. Більш ефективне використання моменту гіроскопічних сил досягнуто в запропонованому Е. Сперрі активному гіроскопічному заспокоювачі хитавиці (1911). Щоб запобігти шкідливому впливу циркуляції судна на роботу заспокоювача бортової хитавиці фірма Сперрі у 1916 р. створила активний заспокоювач з двома однаковими зчленованими гіроскопами.
У 1900 р. А. Шерль, Л. Бреннан, і П. П. Шиловський запропонували однорейкову залізницю зі статично нестійким вагоном, який стабілізується за допомогою гіроскопа. При цьому А. Шерль і П. П. Шиловський використали такий самий пристрій, як у О. Шліка, але з центром тяжіння гіроскопа, вищим за точку його підвісу. У системі Л. Бреннана вісь прецесії стабілізувального гіроскопа є вертикальною, а вісь ротора у положенні рівноваги напрямлена вздовж поперечної осі вагона. На осі прецесії розміщено пружину, яка робить гіроскоп нестійким. У подальшому Бреннан замінив один гіроскоп двома. Хоча практична доцільність побудови однорейкових залізниць зі статично нестійким вагоном так і залишилася недоведеною, а гіроскопічні заспокоювачі хитавиці суден застосовували обмежено, у процесі роботи зі створення і дослідження цих пристроїв було накопичено цінні ідеї і теоретичні результати. Наприклад, слід відзначити винахід способу використання двоступеневого гіроскопа як вимірювача кутової швидкості об'єкта, що стабілізується.
У 1924 р. С. А. Ноздровський запропонував силовий гіроскопічний стабілізатор з розвантажувальним двигуном. Порівняно з вільним гіроскопом така конструкція має ту перевагу, що дає можливість навантажувати вісь стабілізіції моментами зовнішніх сил. Це дозволяє розміщувати на зовнішній рамці тіла, що стабілізуються (наприклад, маятник, фотознімальну апаратуру чи акселерометр), і встановлювати на осі стабілізації різні датчики.
Силовий гіростабілізатор спочатку використовували як гіроскоп напрямку на літаках. Згодом для стабілізації тіла навколо двох або трьох ортогональних осей почали застосовувати спочатку двовісний, а потім і тривісний силові гіростабілізатори. Двовісний використовували як гіровертикаль, для чого на стабілізованій платформі розміщували маятники, які керують через електричні сигнали датчиками моментів по осях прецесії гіроскопів. За допомогою такого пристрою стабілізували й тіла великої маси, наприклад, кулемет. Тривісний гірокомпас містив гіровертикаль і розміщений на її площадці одновісний гіростабілізатор — гіроазимут. Цей прилад — гіроазимутгоризонт — дозволяв за допомогою слідкувальних сервоприводів і перетворювачів полярних координат стабілізувати різні пристрої на кораблі (візири, гармати), а також виробляти дані, потрібні для керування артилерійською стрільбою. На літаках подібні прилади виконують аналогічні функції, їх також використовують як датчики кутів для автопілота. У кінці 1940-х років у зв'язку з передбачуваним використанням гіростабілізаторів у системах навігації намітилася тенденція до різкого підвищення точності цих приладів і передусім до зменшування швидкості дрейфу стабілізованих платформ. У 1950-х роках визначився розвиток двох типів гіростабілізаторів — з трьома двоступеневими або двома вільними (триступеневими) гіроскопами як чутливими елементами. У результаті стало можливим використання гіроскопічних пристроїв задля побудови інерціальних систем керування рухомими об'єктами не тільки короткочасної, але й порівняно довготривалої дії.
Від початку розвитку гіроскопічної техніки виникла потреба замінити астрономічне визначення місцеперебування, яке потребує спостереження світил і горизонту, роботою механічної системи, що містить гіроскопи, маятник і годинник. Цю ідею було втілено у заявках на винахід М. Керрі (1903), В. Алексєєва (1911) і Ф. Свині (1911). У запропонованих ними пристроях два вільні гіроскопи вказували незмінні відносно зірок напрямки, а гіромаятник — вертикаль. Користуючись цими засобами, знаючи точку відправлення судна і враховуючи за допомогою хронометра кут повороту Землі відносно зірок за час руху, можна визначати поточне географічне місце перебування корабля подібно до того, як це робиться за допомогою секстанта. На цій основі у другій половині XX ст. були створені досконалі інерціальні навігаційні системи. У 60-ті рр. XX ст., коли обчислювальна техніка досягла досить високого рівня розвитку, почалося детальне розроблення «безплатформових» інерціальних навігаційних систем, чутливі елементи яких — гіроскопи та акселерометри — розміщуються безпосередньо на борті об'єкта (без гіростабілізатора).
Однороторний гіроскопічний компас застосовують і для визначення площини орбіти штучних супутників Землі. Конструкція такого гіроприладу, який отримав назву гіроорбітанта (гіроскопічної орбіти), через роботу його у специфічних умовах відрізняється від конструкції морських гірокомпасів.
Нині гіроскопічну техніку дедалі більше використовують для побутових потреб. Поширення автомобільної техніки і розвиток технології створення мікромеханічних зразків гіроскопічної техніки (які визначаються набагато меншою собівартістю) створили умови їх застосування для короткочасної автономної навігації автомобілів у несприятливих умовах поза зоною видимості GPS (Global Position System). Тому наразі набуло сенсу створення і використання таких мікромеханічних приладів.
Див. також
Література
- Лазарєв Ю. Ф. Основи теорії чутливих елементів систем орієнтації: підручник / Ю. Ф. Лазарєв, П. М. Бондар. — К.:НТУУ «КПІ», 2011. — 644 с.
- Титов Р. Ю. Мореходная астрономия: учебник для мореходных училищ / Р. Ю. Титов, Г. И. Файн. — М.: Транспорт, 1984. — 252 с.
- Николаи Е. Л. Гироскоп и некоторые его технические применения / Е. Л. Николаи. — М.-Л.: Гостехиздат, 1947. — 152 с.
- История механики гироскопических систем / Сб. статей. — М.: Наука, 1975. — 128 с.
- Развитие механики гироскопических и инерциальных систем: сб. статей. — М.: Наука, 1973. — 456 с.
Посилання
- Гіроскоп // Універсальний словник-енциклопедія. — 4-те вид. — К. : Тека, 2006.