Авторотація (вертоліт)
Авторотація — це стан польоту, де несний гвинт вертольота або подібного апарату обертається під дією повітря, що рухається вгору крізь гвинт (як у випадку з автожиром) а не завдяки роботі двигуна.[1][2][3] Термін авторотація походить з періоду ранніх розробок вертольотів (між 1915 і 1920 рр.), та стосується гвинтів, що обертаються без участі двигуна.[4]
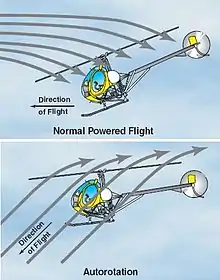
У нормальному польоті з працюючим двигуном повітря втягується в систему несного гвинта згори і спрямовується донизу. Але під час авторотації повітря переміщується у системі гвинта знизу вгору, оскільки вертоліт опускається . Авторотація є можливою механічно внаслідок наявності обгінної муфти, яка дозволяє гвинту обертатися, навіть якщо двигун не працює, а також лопатей несного гвинта, вигнутих таким чином, що, коли кут установки лопатей максимально зменшено, внутрішня частина лопаті має від'ємний кут нахилу стосовно горизонтальної площини. У цьому випадку набігаючий потік повітря може обертати лопаті гвинта. Завдяки цьому способу вертоліт може безпечно приземлитися у разі повної відмови двигуна. Отже, всі вертольоти з одним двигуном повинні продемонструвати цю можливість, щоб отримати сертифікат типу.[5]
Найдовша авторотація в історії була здійснена Жаном Буле 1972 року, коли він досяг рекордної висоти 12440 м (40814 футів) на Aérospatiale Lama. Внаслідок температури −63 С° на цій висоті, як тільки він зменшив швидкість, у двигуні стався зрив полум'я і перезапустити його не вдалося. Використовуючи авторотацію, він зумів безпечно посадити вертоліт.[6]
Зниження і посадка
Для вертольота, термін «авторотація» стосується низхідного маневру, коли двигун відмикається від системи несного гвинта і лопаті ґвинта рухаються виключно завдяки висхідному потоку повітря. Обгінна муфта — це спеціальний механізм зчеплення, котрий припиняє роботу щоразу, коли кількість обертів за хвилину у двигуна є меншою, ніж кількість обертів за хвилину у гвинта. Якщо двигун відмовляє, обгінна муфта автоматично відмикає двигун від несного гвинта, що дозволяє ґвинту обертатися вільно.
Найбільш поширеною причиною авторотації є несправність або відмова двигуна, але авторотація також може бути здійснена в разі повної відмови хвостового гвинта, або, як наслідок, втрати ефективності хвостового гвинта[7], оскільки в авторотації практично відсутній крутний момент. Якщо дозволяє висота, авторотації також можуть бути використані для виходу зі стану вихрового кільця.[2] У всіх випадках, успішна посадка залежить від висоти і швидкості вертольота на початку авторотації (див. діаграму висота-швидкість).
У момент відмови двигуна, лопаті несного гвинта забезпечують підйом і тягу завдяки своєму куту атаки і швидкості. Шляхом негайного зниження кута установки лопатей, що зазвичай робиться у разі відмови двигуна, пілот зменшує підйом та лобовий опір і вертоліт негайно починає знижуватись, створюючи висхідний потік повітря крізь систему ґвинта. Цей висхідний потік повітря забезпечує достатню тягу для підтримки обертів ґвинта протягом усього спуску. Оскільки під час авторотації хвостовий гвинт приводиться в рух передачею несного ґвинта, курс контролюється так само, як і в нормальному польоті.
Декілька факторів впливають на швидкість зниження в режимі авторотації: висота за густиною, політна вага, кількість обертів гвинта за хвилину та швидкість польоту. Основним чинником контролю швидкості зниження є повітряна швидкість. Вища або нижча повітряна швидкість досягаються циклічною зміною кута установки лопатей, як за нормального польоту. Швидкість зниження є високою за нульової швидкості польоту і зменшується до мінімуму на швидкості приблизно від 50 до 90 вузлів, в залежності від конкретного вертольота і згаданих раніше чинників. Коли повітряна швидкість перевищує ту, за якої швидкість зниження є мінімальною, швидкість зниження знову зростає. Навіть за нульової швидкості польоту гвинт є досить ефективним, оскільки його коефіцієнт опору є майже таким самим, як у парашута,[8][9] незважаючи на набагато меншу щільність.
У випадку приземлення на авторотації, кінетична енергія, накопичена в лопатях, що обертаються, використовується для зменшення швидкості зниження, а отже, м'якої посадки. Щоб зупинити вертоліт з високою швидкістю зниження, потрібна більша кількість енергії гвинта, аніж для зупинки вертольота, який знижується повільніше. Тому авторотаційні зниження за дуже низьких або дуже високих швидкостей є більш критичними, ніж ті, які здійснюються за мінімальної швидкості зниження.
Кожен тип вертольота має певну швидкість польоту, за якої планування з вимкненим двигуном є найбільш ефективним. Найкращою швидкістю є та, що поєднує найбільшу дальність планування з найменшою швидкістю зниження. Ця повітряна швидкість відрізняється для кожного типу вертольота, а також деякі фактори (висота за густиною, вітер) впливають на всі конфігурації тим самим чином. Повітряна швидкість для авторотації встановлюється окремо для кожного типу вертольота на основі середніх погодних та вітрових умов і нормального завантаження.
Вертоліт з важким вантажем на великій висоті щільності або за поривчастого вітру може досягти максимальних політних якостей завдяки дещо підвищеній повітряній швидкості під час зниження. На малій висоті за густиною та легкому вантажі, кращі політні якості досягаються незначним зниженням нормальної повітряної швидкості. Дотримуючись цієї загальної процедури коригування повітряної швидкості згідно з існуючими умовами, пілот може досягти приблизно однакового кута глісади планування за будь-яких обставин та визначити точку приземлення. Цей оптимальний кут глісади планування зазвичай становить 17-20 градусів.[10]
Зони авторотації
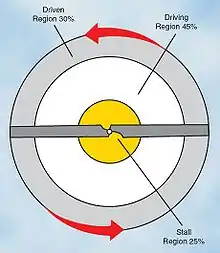
Під час вертикальної авторотації диск ґвинта складається з трьох зон — веденої зони, провідної зони та зони відривного обтікання. Розміри цих зон варіюються залежно від кроку лопатей, швидкості зниження та кількості обертів несучого гвинта за хвилину. Якщо кількість обертів за хвилину, крок лопатей, або швидкість зниження змінюються, розмір зон змінюється стосовно один одного.
Ведена зона (інша назва — пропелерна зона) знаходиться на кінцях лопатей. Зазвичай вона займає приблизно 30 відсотків від радіуса. Саме ведена зона виробляє найбільший опір. Результатом є уповільнення обертання лопаті.
Провідна зона (авторотаційна зона) зазвичай займає від 25 до 70 відсотків від радіуса лопатей, виробляє сили, необхідні для повороту лопатей під час авторотації. Повна аеродинамічна сила у провідній зоні спрямована дещо вперед стосовно осі обертання, виробляючи безперервну прискорюючу силу. Цей нахил забезпечує тягу, яка прискорює обертання лопаті. Розмір провідної зони залежить від налаштування кроку лопатей, швидкості зниження, і кількості обертів несучого гвинта за хвилину.
Внутрішні 25 відсотків розміру лопаті називаються зоною відривного обтікання. Ця зона діє, коли кут атаки (кут звалювання) є вищим за максимальний, спричиняючи опір, який сповільнює обертання лопаті. Стала кількість обертів ґвинта за хвилину досягається шляхом регулювання загального кута установки лопатей, так що сили провідної області, котрі прискорюють лопаті, врівноважуються з уповільнюючими силами з двох інших зон.
Контролюючи розмір провідної зони, пілот може регулювати кількість обертів за хвилину. Наприклад, якщо загальний крок збільшується, то збільшується і кут тангажу у всіх зонах. Це призводить до того, що точка рівноваги зміщується вздовж лопаті досередини, таким чином збільшуючи розмір веденої зони. Зона відривного обтікання також збільшується, в той час як провідна зона зменшується. Зменшення розміру провідної зони спричиняє зменшення прискорюючої сили провідної зони та кількості обертів гвинта за хвилину.
Див. також
Примітки
- Rotorcraft Flying Handbook. U.S. Government Printing Office, Washington D.C.: U.S. Federal Aviation Administration. 2000. с. 16–1. ISBN 1-56027-404-2. FAA-8083-21. «a gyroplane rotor system operates in autorotation»
- Bensen, Igor. «How they fly — Bensen explains all» Gyrocopters UK . Accessed: 10 April 2014. Quote: «air.. (is) deflected downward»
- Charnov, Bruce H. Cierva, Pitcairn and the Legacy of Rotary-Wing Flight Архівовано 3 березня 2016 у Wayback Machine. Hofstra University . Accessed: 22 November 2011.
- «Autorotation», Dictionary.com Unabridged (v 1.1) . Random House, Inc. 17 April 2007
- USA Federal Aviation Regulations, § 27.71 Autorotation performance
- %26 Wing International Jean Boulet autorotation&f=false Autorotation — Learning to Fly Helicopters
- Rotorcraft Flying Handbook Section 11-12, Federal Aviation Administration, Skyhorse Publishing (July 2007) ISBN 978-1-60239-060-7
- Johnson, Wayne. Helicopter theory p109, Courier Dover Publications , 1980. Accessed: 25 February 2012. ISBN 0-486-68230-7
- John M. Seddon, Simon Newman. Basic Helicopter Aerodynamics p52, John Wiley and Sons , 2011. Accessed: 25 February 2012. ISBN 1-119-99410-1
- Paul Cantrell. «Aerodynamics of Autorotation — steady state descent» Copters Accessed: 11 November 2013.
Посилання
- Авторотація // ВУЕ
- Popular explanation of autorotation written by Paul Cantrell.
- Pilot's 'exceptional flying' saves $540,000 helicopter — The New Zealand Herald, Monday 18 February 2008
