Бінокулярна невідповідність
Бінокулярна диспаратність або бінокулярна невідповідність означає різницю взаємного положення об'єкта, який спостерігався лівим і правим оком, що є наслідком горизонтальної сепарації очей (паралакс). Мозок використовує бінокулярну невідповідність для того, щоб отримати інформацію про глибину із двовимірних зображень на сітківці використовуючи стереоскопічний ефект. В Комп'ютерному баченні, під бінокулярною невідповідністю мають на увазі різницю координат одних і тих самих точок простору на двох кадрах стерео зображення.
Визначення
Очі людини віднесені одне від одного по горизонталі приблизно на 50–75 мм відстані між зіницями. Таким чином, кожне окреме око дивиться трохи під іншим кутом зору на світ довкола. Це можна легко побачити якщо закрити по черзі спочатку одне око потім інше, дивлячись в той час на вертикальний предмет. Бінокулярна невідповідність спостерігається як помітний зсув по горизонталі вертикальних об'єктів в обох випадках.
У будь-який момент, лінія зору обох очей зустрічається в точці простору. Ця точка в просторі проєктується в те саме місце (в центрі) на сітківці обох очей. Через різні точки спостереження, з яких дивляться обидва ока, багато інших точок простору не потрапляють в однакові місця на сітківці. Зорова бінокулярна невідповідність визначається як різниця між проєкціями точок в обох очах і зазвичай задається в градусах як кут зору[1].
Термін «бінокулярна диспаратність» стосується геометричних вимірювань, які виконуються ззовні ока. Диспаратність зображень на справжній сітківці залежить від внутрішніх чинників ока, особливо розташування вузлових точок, навіть якщо розріз сітківки є ідеальним колом. Невідповідність на сітківці відповідає бінокулярній невідповідності при вимірюванні в градусах, але дуже відрізняється якщо вимірювати відстанями, через складну структуру в середині ока.
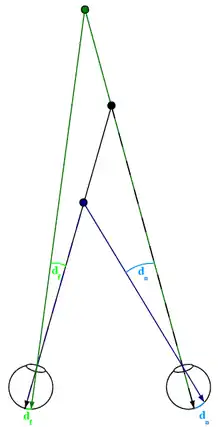
На зображенні: Чорна заповнена точка це точка фіксації. Синій об'єкт знаходиться ближче до споглядача. Таким чином, він має «ближню» диспаратність dn. Об'єкт, який знаходиться далі (зелений) відповідно має «дальню» диспаратність df. Бінокулярна диспаратність це кут між двома лініями проєкції в одному оці (математично, dn-df, із знаком, виміряно проти годинникової стрілки). Одна з них є справжньою проєкцією від об'єкта на справжню точку проєкції. Інша є уявною проєкцією, яка проходить через вузлові точки точки фіксації.
Обчислення невідповідності на основі цифрових стереозображень
Невідповідність однакових ознак на двох стереозображеннях зазвичай визначається як зсув координат даної ознаки вліво, якщо порівнювати з положенням на правому зображенні.[2] Наприклад, одна точка, яка знаходиться в координаті x із значенням t (вимірюється в пікселях) на лівому зображені, може знаходитися в значенні координати x, що дорівнює t - 3 на правому зображенні. В такому випадку, невідповідність знаходження на правому зображенні становитиме 3 пікселі.
Стереозображення не завжди можливо коректно зіставити аби швидко розрахувати невідповідність. Наприклад, набір камер може бути орієнтований трохи зі зміщенням від вирівняного положення. За допомогою процесу вирівнювання, відомого як ректифікація зображення, два зображення повертаються так, щоб невідповідність можна було шукати лише в горизонтальному напрямку (тобто не буде невідповідності по координаті y зображення)[2]. Таку властивість також можна отримати точним встановленням стереокамер перед тим, як будуть отримані зображення.
Примітки
- Qian, N., Binocular Disparity and the Perception of Depth, Neuron, 18, 359—368, 1997.
- Linda G. Shapiro and George C. Stockman (2001). Computer Vision. Prentice Hall, 371-409. ISBN 0-13-030796-3.