Кулачковий механізм
Кулачко́вий механі́зм — це триланковий механізм, що складається з двох рухомих ланок: кулачка чи копіра, що здійснюють, відповідно, обертальний або поступальний рух та штовхача, якщо ланка виконує прямолінійний рух, або коромисла, якщо ланка забезпечує коливний рух, які утворюють між собою вищу кінематичну пару, та стояка, з яким ці ланки утворюють нижчі кінематичні пари. Часто для заміни у вищій парі тертя ковзання тертям кочення і зменшення зношування, у схему механізму включають додаткову ланку — ролик.
Вхідною ланкою є кулачок (копір), а вихідною — штовхач або коромисло, залежно від характеру руху. Кулачок (копір) — це ланка, елемент вищої пари який виконаний у вигляді деякої криволінійної поверхні відповідно до заданого закону руху штовхача.
Призначення
Використовують кулачкові механізми для узгодження законів руху різних механізмів, що входять до складу машини або агрегату.
Кулачкові механізми призначені для перетворення обертального (поступального) руху кулачка (копіра) у зворотно-поступальний (зворотно-обертальний) рух штовхача (коромисла). При цьому у механізмі можна реалізувати перетворення руху по складному закону. Основною перевагою кулачкових механізмів є можливість забезпечення точного позиціювання вихідної ланки. Ця перевага визначила їх використання у найпростіших пристроях циклової промислової автоматики для вмикання-вимикання робочих органів у певній послідовності, в двигунах внутрішнього згорання у системі газорозподілу, в металорізальних верстатах та інших машинах для відтворення складної траєкторії руху робочих органів.
Класифікація
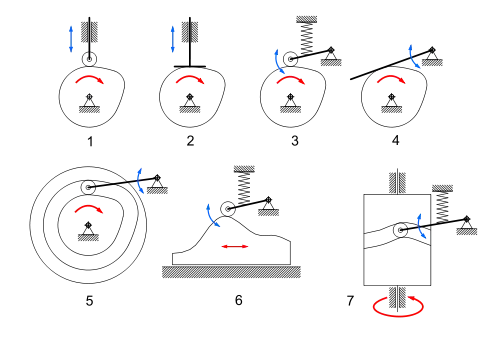
Кулачкові механізми класифікуються за такими ознаками (див. рисунок):
- за видом вхідної ланки:
- з кулачком (поз. 1, 2, 3, 4, 5, 7);
- з копіром (поз. 6);
- за розміщенням ланок у просторі
- просторові (поз. 7);
- плоскі (поз. 1-6);
- за видом руху вихідної ланки:
- зворотно-поступальний (із штовхачем) (поз. 1, 2);
- зворотно-коливний (з коромислом) (поз. 3-7);
- за видом кулачка:
- дисковий (плоский) (поз. 1-6);
- циліндричний (поз. 7);
- складний просторовий;
- за формою робочої поверхні вихідної ланки:
- плоска (поз. 2, 4);
- загострена;
- циліндрична;
- сферична;
- евольвентна;
- з роликом (поз. 1, 3, 5, 6, 7)
- за способом замикання елементів вищої пари:
- силове (поз. 3, 6, 7);
- геометричне (поз. 5, 7);
- за параметрами руху штовхача (коромисла):
- механізми, що забезпечують переміщення по заданому закону руху;
- механізми, що забезпечують тільки задані крайні положення виконавчої ланки, при цьому закон переміщення обирається з набору типових законів руху у залежності від умов експлуатації та технології виготовлення.
Див. також
Посилання
- Introduction to Mechanisms - Cams Classification, nomenclature, motion, and design of cams; information for the course, Introduction to Mechanisms, at Carnegie Mellon University.
Література
- Кіницький Я. Т. Теорія механізмів і машин:Підручник .-К.: Наукова думка,2002 .-660 с. ISBN 966-00-0740-Х
- Кореняко О. С. Теорія механізмів і машин:Навчальний посібник / За ред. Афанасьєва М. К.- К.: Вища школа, 1987 .- 206 с.
- Артоболевский И. И. Теория механизмов и машин: Учеб. для втузов.– 4-е изд., перераб. И доп.– М.: Наука. Гл. ред. физ.-мат. лит., 1988.– 640 с.
