Ривок (кінематика)
Риво́к або по́штовх (англ. jerk) — векторна фізична величина, що характеризує темп (інтенсивність) зміни прискорення тіла у часі. Він є третьою похідною по часу від радіус-вектора.
| Ривок | ||||
 | ||||
| Символи: | ||||
|---|---|---|---|---|
| Одиниці вимірювання | ||||
| Розмірність: | L T−3 | |||
| Одиниці вимірювання: | м/с³; m/s³ | |||

Ривок у кінематиці
Вектор ривка у довільний момент часу визначається шляхом диференціювання вектора прискорення точки по часу:


де: — прискорення,

- — швидкість,
- — радіус-вектор.


Відповідно формули для руху з постійним ривком матимуть вигляд:



Ці формули можна узагальнювати і на вищі похідні радіус-вектора, вводячи в розкладання координати у степеневий ряд наступні члени. За традицією або просто для зручності через часте використання перші 3 коефіцієнти в розкладі мають власні назви: швидкість, прискорення і ривок відповідно.
Одиниці вимірювання ривка
- метр на секунду в кубі, м/с³, похідна одиниця системи SI.
- сантиметр на секунду в кубі, см/с³, похідна одиниця системи СГС.
- «же» на секунду, g/с, де g = 9,81 м/с² — стандартне прискорення вільного падіння.
Електродинаміка
Сила, що діє на заряд, який рухається прискорено (радіаційне тертя або реакція випромінення), є пропорційною до третьої похідної координати (тобто першої похідної прискорення) по часу.
- (в системі SI).

Застосування
Транспорт
Поняття ривка застосовується при перевезенні пасажирів, а також крихких і цінних вантажів.
Пасажир пристосовується до прискорення, напружуючи м'язи та обираючи позу. При зміні прискорення поза, зазвичай, також змінюється. Пасажиру потрібно дати час, щоб відреагувати та змінити позу — інакше стоячий пасажир втратить рівновагу, а сидячий — може зазнати удару. Типовий приклад — момент повної зупинки вагона метро після процесу гальмування: стоячі пасажири, нахилені вперед під час гальмування, не встигають пристосуватися до нового прискорення, що виникає в момент зупинки, і нахиляються назад.
Аналогічно, вантаж, до якого прикладене прискорення, деформується. Часта і швидка зміна прискорення означає часту і швидку деформацію, що може привести до руйнування крихкого вантажу. Частково ривок можна зменшити, використавши амортизаційне упакування.
Для багатьох приладів і пристроїв в технічних умовах нормується граничне значення ривка.
Похідні більшого порядку на транспорті застосовуються рідко. Відомий випадок, коли радіус-вектор досліджувався до четвертої похідної — виведення на орбіту телескопа Габбла[1].
В теоретичній механіці
Застосовується в інтегруванні за Верле для швидкого чисельного розв'язування диференціальних рівнянь руху матеріальних точок.
У роботі фінського математика К. Зундмана, присвяченій розв'язанню «задачі трьох тіл», використовуються вищі похідні і ряди[2].
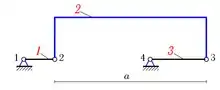
Поняття ривка знаходить застосування і в задачі про обчислення кутових швидкостей і кутових прискорень ланок шарнірного чотири ланкового механізму — в ситуації, коли усі шарніри лежать на одній прямій[3].
Металорізальні верстати
В металорізальних верстатах с ЧПК зміна прискорення також є важливою — швидкі деформації інструмента, що трапляються при високому ривку, передчасно виводять інструмент з ладу.
Див. також
Примітки
- What is the term used for the third derivative of position?. Архів оригіналу за 30 листопада 2016. Процитовано 21 лютого 2014.
- K. Sundman (1912). Mémoire sur le problème des trois corps. Acta Mathematica 36: 105–179. doi:10.1007/BF02422379. (фр.)
- Кирсанов М. Н. Решения задач по теоретической механике. — М. : ИНФРА-М, 2015. — ISBN 978-5-16-010558-1. — С. 118—119.
Джерела
- Капунцов Ю. Д. Электрооборудование и электропривод промышленных установок. Учебник для вузов. — М. : Высшая школа, 1979. — 360 с.
- Хитрик В. Э. Методы динамической оптимизации механизмов машин-автоматов. — М. : Изд-во Ленингр. ун-та, 1974. — 116 с.
Посилання
- Кинематика механизмов // Большая советская энциклопедия : в 30 т. / главн. ред. А. М. Прохоров. — 3-е изд. — М. : «Советская энциклопедия», 1969—1978. (рос.)