Розщеплені холлівські структури
Розще́плені хо́ллівські структу́ри (РХС) — різновид давачів Холла. РХС є конструктивною базою сенсорів магнітного поля на ефекті Холла [1][2]. На відміну від традиційних перетворювачів Холла, які типово мають сформовані до напівпровідникової пластини прямокутної форми по два струмових та два потенціальних контакти, форма РХС та кількість контактів в них можуть бути довільними. Здебільшого РХС складається з декількох напівелементів Холла, поєднання яких дозволяє отримати сенсори магнітного поля з новими функціональними можливостями та характеристиками.
Функціональні можливості та переваги сенсорів на основі РХС
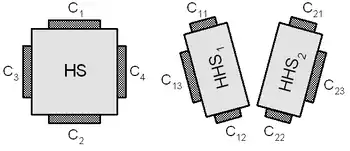 Традиційний перетворювач Холла HS з двома струмовими (C1, С2) та двома
потенціальними (C3, С4) контактами (зліва) та його елементарний поділ на два напівелементи Холла
HHS1, HHS2 з контактами C11, С12, C13 та C21, С22, C23, відповідно (справа) |
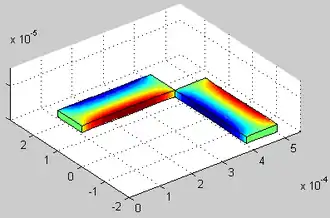 Приклад модельного аналізу карти потенціалів у двох ортогонально розвернутих
структурах |
Функціональними можливостями та перевагами сенсорів на основі РХС є:
- мінімізація відстані між чутливою ділянкою сенсора та об’єктом вимірювання, зокрема при вимірюванні приповерхневих магнітних полів;
- формування об'ємних структур з високою просторовою роздільною здатністю вимірювання трьох
ортогональних проекцій (BX, BY, BZ) вектора індукції магнітного поля (3D сенсорів);
- формування розподілених в просторі матриць сенсорів (сканерів), зокрема для вимірювання розподілу
двох проекцій (BX, BY) приповерхневого магнітного поля (2D сканерів);
- формування однокристальних (single chip) 2D та 3D сенсорів в складі однокристальних кремнієвих
інтегральних схем чи в пристроях вимірювання магнітних полів на основі радіаційно-стійких напівпровідникових структур.
Формування сигналу в сенсорах на РХС
На відміну від традиційних перетворювачів Холла, формування інформативних сигналів в РХС та їх інтерпретація є проблематичнішими задачами. Здебільшого, це обумовлено неможливістю компенсувати вихідний сигнал РХС при відсутності магнітного поля та наявністю у цьому сигналі двох компонент — холлівської та магніторезистивної. Параметричний аналіз РХС потребує специфічних алгоритмів математичного моделювання, а застосування РХС — складніших методик калібрування [3] [4] [5] [6].
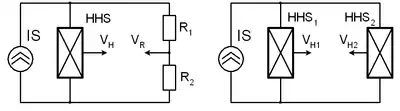
Частковими рішеннями задач формування сигналу в сенсорах на РХС є використання:
- півмостової схеми, в якій вихідна напруга РХС вимірюється відносно напруги, сформованої резистивним подільником, що ввімкнено паралельно РХС (зокрема, в 2D сканерах);
- мостової схеми, в яких інформативним сигнал є різницева напруга між виходами двох напівелементів
Холла (зокрема, в сенсорах вимірювання градієнта магнітного поля та в РХС з кутовим розміщенням чутливої ділянки).
РХС з кутовим розміщенням чутливої ділянки та 3D зонд на їх основі
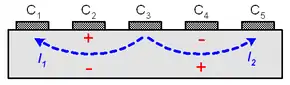
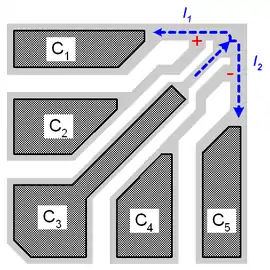 РХС з кутовим розміщенням чутливої ділянки (C3 – центральний струмовий контакт, C1, C5 – бокові струмові контакти, C2, C4 – потенціальні контакти) |
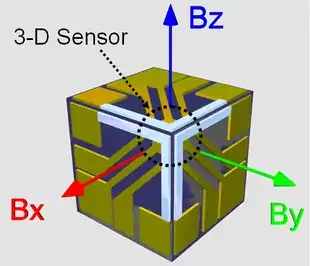 3-D зонд на основі РХС з кутовим розміщенням чутливої ділянки (чутлива ділянка окреслена пунктирною лінією і позначена 3-D Sensor) |
Характерним представником сенсора магнітного поля на РХС є структура, в якій чутлива ділянка сенсора винесена на периферію, зокрема в кутову область прямокутної пластини. Така РХС має центральний струмовий контакт, струм від якого тече через чутливу ділянку до двох бокових струмових контактів. Інформативний сигнал РХС формується на двох потенціальних контактах, що сформовані по краях чутливої ділянки [7] [8]. Перевагою РХС з кутовим розміщенням чутливої ділянки є мінімізація відстані між чутливою ділянкою сенсора та поверхнею об’єкта вимірювання, а також можливість формування об’ємних структур з високою просторовою роздільною здатністю вимірювання трьох ортогональних проекцій BX, BY, BZ вектора індукції магнітного поля (3D сенсорів).
Об'ємну структуру 3D зонда магнітного поля формують, розмістивши три РХС з кутовим розміщенням чутливої ділянки на суміжних сторонах куба таким чином, щоб чутливі ділянки трьох РХС утворили вершину куба. Ця вершина куба може як завгодно близько наближатися до вимірювальної поверхні, а отже забезпечує високу просторову роздільну здатність вимірювання BX, BY, BZ проекцій вектора індукції магнітного поля.
РХС сенсорів планарного магнітного поля
На відміну від традиційних перетворювачів Холла, відхилення рухомих носіїв в яких відбувається в паралельній до поверхні структури площині, а вісь чутливості є перпендикулярною до поверхні структури, відхилення рухомих носіїв в сенсорах планарного магнітного поля відбувається по товщині пластини сенсора, що забезпечує чутливість до паралельних структурі сенсора магнітних полів. РХС сенсорів планарного магнітного поля називають вертикальними елементами Холла. Типово, вертикальний елемент Холла містить сформовані вздовж однієї лінії на поверхні пластини один центральний та два бокові струмові контакти. В проміжку між струмовими контактами сформовано два потенціальні контакти, що є рівновіддаленими від центрального струмового контакту [9] [10].
Вісь чутливості вертикального елемента Холла є перпендикулярною до осі, вздовж якої розміщено контакти та паралельною поверхні пластини РХС.
РХС інтегральних 2D та 3D зондів магнітного поля
Поєднуючи дві схрещені під прямим кутом РХС вертикальних елементів Холла, формують 2D та 3D зонди магнітного поля. Розрізняють декілька варіантів живлення таких зондів. Зокрема, струм може протікати від центрального контакту до чотирьох бокових контактів (9-и контактна конструкція), лише між боковими контактами з протилежним напрямом струму в протилежних плечах структури (8-и контактна конструкція без центрального контакту), чи лише в одному з вертикальних елементів Холла тощо.
Поєднання таких варіантів живлення з відповідними способами формування вихідних сигналів дозволяє сформувати інтегральний сенсор для вимірювання трьох ортогональних BX, BY, BZ проекцій вектора індукції магнітного поля [11] [12][13][14]. При реалізації РХС вертикальних елементів Холла на основі тонкоплівкової технології без поверхневого ізолюючого шару, зокрема з використанням InSb чутливої плівки, потенціальні контакти формують, використовуючи проміжні потоншені ділянки, що контактують зі струмовими плечами РХС в глибині чутливої плівки [7][8].
Транзисторні РХС
Використання РХС в вимірювальних перетворювачах транзисторного типу дозволяє реалізувати магнітотранзистори з розщепленим колектором (spit collector) чи розщепленим стоком (spit drain). На відміну від вищерозглянутих РХС інформативними сигналами транзисторних РХС є не вихідна напруга, а різниця колекторних чи стокових струмів. Транзисторні РХС, типово, є елементами магнітосенсорних кремнієвих інтегральних схем [1][2].
 РХС на вертикальних елементах
Холла для вимірювання ортогональних проекцій магнітного поля |
 Активна частина тонкоплівкової РХС 3D зонда магнітного поля |
Конструкція сенсора на двох магнітотранзисторах з розщепленими колекторами (B0, B1, B2 – бази; С11, С12, С21, С22 – колектори, E1, E2 – емітери) |
Розвиток РХС
Метою подальшого розвитку сенсорів магнітного поля на основі РХС є підвищення точності вимірювання ортогональних проекцій та спрощення використання цих сенсорів. Це досягається відповідними конструктивними рішеннями, мінімізацією кількості контактів, удосконаленням математичних моделей, оптимізацією алгоритму калібрування тощо [15] [16] [17] [18]
Див. також
Література
- R.S. Popovic. Hall Effect Devices. — 2nd ed. — Bristol and Philadelphia, USA
- IOP Publishing, 2004
- 'Мікроелектронні сенсорні пристрої магнітного поля: Монографія. За редакцією Готри З.Ю. / Большакова І.А., Гладун М.Р., Голяка Р.Л., Готра З.Ю., Лопатинський І.Є., Потенцкі Є., Сопільник Л.І. — Львів: Видавництво Національного університету "Львівська політехніка", 2001. — 412c.
- Methods of modeling of magnetic sensors based on splitted Hall structure / Holyaka R., Marusenkova T., Chapran M. - Advanced Numerical modeling. IIPhDW — 2011. ISBN 978-83-61956-02-0. Zielona Gora. Poland. pp. 75-76.
- Метод калібрування сенсорів магнітного поля на розщеплених холлівських структурах / Готра З.Ю., Голяка Р.Л., Марусенкова Т.А. // Вісник НТУ «ХПІ». Тематичний випуск: Інформатика та моделювання. — Харків: НТУ «ХПІ». — 2010. — № 31. — с. 74 — 79.
- Польова характеристика сенсорів магнітного поля на розчеплених холлівських структурах / І.А. Большакова, Р.Л Голяка, Т.А. Марусенкова // Вісник Національного університету “Львівська політехніка”, Електроніка, № 681, 2010. — c. 66 — 75.
- Методи моделювання та калібрування 3D-зондів магнітного поля на розщеплених холлівських структурах / Большакова І.А., Голяка Р.Л., Готра З.Ю., Марусенкова Т.А. // Електроніка та зв'язок. Тематичний випуск «Електроніка та нанотехнології». — 2011. — № 2(61). — с. 34 — 38.
- Большакова І.А., Голяка Р.Л., Макідо О.Ю., Марусенкова Т.А. Нові конструкції напівпровідникових тонкоплівкових 3-D сенсорів магнітного поля. // Электроника и связь. — 2009. — №2-3. — c. 6-10.
- Большакова І.А., Голяка Р.Л., Мороз А.П., Єрашок В.Е., Марусенкова Т.А. Сенсорні пристрої магнітного поля на сенсорах Холла з розщепленою структурою // Електроніка. Вісник Національного університету „Львівська політехніка”. — 2009. — № 646 — c. 38-45.
- J. Pascal, L. Hebrard, J. Kammerer, V. Frick, and J. P. Blonde First vertical Hall device in standard 0.35 μm CMOS technology. Sensor and Actuators. A: Phys. Vol. 147. 2008. — pp. 41–46.
- C. S. Roumenin, S. V. Lozanova Three-contact parallel-field Hall Devices — the sensors with minimal design complexity. Book of Abstract. Eurosensors XX. Vol. II, Sep. 2006. — pp. 212 –213.
- D.R. Popovic, S. Dimitrijevic, M. Blagojevic, P. Kejik, E. Schurig, R. S. Popovic Three-Axis Teslameter With Integrated Hall Probe. IEEE Transactions on instrumentation and measurement. Vol. 56. N. 4, August 2007. pp. 1396-1402.
- R.S. Popovic, Z. Randjelovic, D. Manic Integrated Hall-Effect Magnetic Sensors. Sensors and Actuators, A 91. 2001. pp. 46-50
- R.S. Popovic, P. Kejik, S. Reymond, D.R. Popovic, M. Blagojevic, S. Dimitrijevic Multi-axis integrated hall magnetic sensors. Nuclear Technology & Radiation Protection. №2. 2007. pp. 20-28.
- M. Paranjape, I. Filanovsky, L. Ristic A 3-D vertical Hall magnetic field sensor in CMOS technology, Sensors and Actuators A, 34 (1992), pp. 9-14.
- Hotra Zenon, Holyaka Roman, Marusenkova Tetyana Optimization of microelectronic magnetic sensors on the splitted Hall structures // Warsztaty Doktoranckie — WD2010 — Sesja P2. Lublin, Poland. 24 - 27 Czerwca 2010. CD. marusenkova.pdf
- Вимірювальний перетворювач магнітного поля. Патент на корисну модель № 58887 / Готра З.Ю., Большакова І.А., Голяка Р.Л., Марусенкова Т.А. — 26.04.2011 — 3с.
- Вимірювальний перетворювач магнітного поля. Патент на корисну модель № 58889 / Готра З.Ю., Большакова І.А., Голяка Р.Л., Марусенкова Т.А. — 26.04.2011 — 4с.
- Вимірювальний перетворювач магнітного поля. Патент на корисну модель № 59265 / Готра З.Ю., Большакова І.А., Голяка Р.Л., Марусенкова Т.А. — 10.05.2011 — 4с.