Сферичний рух
Сфери́чний рух (англ. spherical motion) або оберта́ння навко́ло нерухо́мої то́чки — рух твердого тіла, при якому якась одна його точка залишається нерухомою, а всі інші точки рухаються по поверхнях сфер, що мають центр у цій точці.
Кінематика сферичного руху
Ейлерові кути
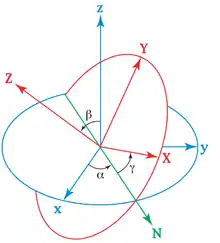
При сферичному русі тверде тіло має три ступені вільності. Три параметри, які б визначали положення такого тіла відносно нерухомої декартової системи координат з осями початкової системи відліку x, y, z та осями системи, що обертається X, Y, Z (див. рис), можуть бути обрані різними способами. У теоретичній механіці положення тіла з однією нерухомою точкою, зазвичай, визначають за допомогою кутів Ейлера, які вводяться наступним способом:
- Кут прецесії α (або ) це кут між віссю x і лінією вузлів N.
- Кут нутації β (або ) це кут між віссю z і віссю Z.
- Кут власного обертання γ (або ) це кут між віссю N і віссю X.



Лінія вузлів (N) є перетином координатних площин xy та XY.
В цьому визначенні мається на увазі, що:
- α задає кут обертання довкола осі z,
- β задає кут обертання довкола осі N,
- γ задає кут обертання довкола осі Z.
Якщо β є нульовим, тоді обертання довкола осі N не відбувалося. Як наслідок, Z збігається із z, α і γ задають поворот довкола однієї і тієї ж осі (z), і результуюче положення можна отримати лише за допомогою повороту довкола осі z, на значення кута, яке дорівнює α+γ.
Замість позначень α, β, γ можуть мати місце також φ, θ, ψ.
Кут прецесії і кут власного обертання змінюється в межах від нуля до 2π;. Кут нутації — від нуля до π.
Положення точки при сферичному русі
Відлік усіх кутів (α, β, γ) від осей x, z і N ведеться проти годинникової стрілки. Отже рівності:

задають рівняння руху тіла при обертанні навколо нерухомої точки.
Швидкість при сферичному русі
Швидкість будь-якої точки з координатами в рухомій системі відліку X, Y, Z тіла, що здійснює сферичний рух може бути визначена за формулою у вигляді векторного добутку:

де — одиничні вектори рухомої системи координат;

- — проекції вектора кутової швидкості на рухомі координати.

Кутова швидкість у проекціях на рухомі координати виражена через кути Ейлера (кінематичні рівняння Ейлера):

Геометричне місце точок, швидкість яких дорівнює нулю, визначається з рівняння

яке являє собою умову колінеарності векторів і . Це векторне рівняння у системі координат XYZ, пов'язаній з тілом, можна записати у вигляді



яке є рівнянням прямої лінії, напрямні косинуси якої пропорційні до проекцій кутової швидкості . У загальному випадку вектор і його проекції є функціями часу, тому положення прямої змінюється як відносно тіла, так і відносно нерухомої системи координат. Пряма, у кожній точці якої швидкості точок тіла у даний момент часу рівні нулю, називається миттєвою віссю обертання або миттєвою віссю швидкостей. Вектор завжди спрямований по миттєвій осі обертання.
Формула для обчислення швидкості руху довільної точки тіла в умовах сферичного руху збігається за формою з виразом для швидкостей точок твердого тіла, що обертається навколо нерухомої осі з кутовою швидкістю . Отже, швидкості точок твердого тіла при сферичному русі розподіляються так, наче тіло обертається навколо осі, що збігається в даний момент часу з миттєвою віссю обертання. Зокрема, модуль швидкості точки в даний момент визначається рівністю

де h — відстань від точки до миттєвої осі обертання. Швидкість точки спрямована перпендикулярно до площини, що проходить через її радіус-вектор і миттєву вісь обертання.
Прискорення при сферичному русі
Виходячи з означення прискорення та на основі рівності, записаної для визначення кутової швидкості, можна записати:

Але
- , а


отже,

Отже, прискорення можна подати у вигляді векторної суми двох прискорень обертального (перший доданок) і доосьового (другий доданок).

Основний закон динаміки обертального руху
Похідна по часу від моменту імпульсу механічної системи відносно нерухомої інерційної системи відліку точки або центру інерції системи дорівнює головному моменту відносно тієї ж точки усіх зовнішніх сил , прикладених до системи:


- .

Це рівняння є виразом основного закону динаміки твердого тіла, що обертається навколо нерухомої точки.
Джерела
- Кільчевський М. О. Курс теоретичної механіки. Т. 1. — К.: Вища школа, 1972. — 376 с.
- Павловський М. А. Теоретична механіка: Підручник для студентів вищих навчальних закладів. — К.: Техніка, 2002. — 512 с. ISBN 966-575-184-0.
- Тарг С. М. Краткий курс теоретической механики. — М.: Высшая школа, 1986. — 416 с.
- Токар А. М. Теоретична механіка. Кінематика (методи і задачі). — К.: Либідь, 2001. — 416 с.
Посилання
- Рейтій О. К. Теоретична механіка (методичний посібник з лабораторних робіт). Частина І. Кінематика. — Ужгород: Видавництво УжНУ «Говерла», 2006. — 64 с.