Ейлерові кути
Ейлерові кути — три кути, за допомогою яких математично описується поворот однієї системи координат щодо іншої у тривимірному просторі.
| Класична механіка |
|---|
| Історія класичної механіки |
|
Фундаментальні поняття Простір · Час · Система відліку · Маса · Інерція · Швидкість · Прискорення · Імпульс · Сила · Гравітація · Момент імпульсу · Момент сили · Момент інерції · Енергія · Кінетична енергія · Потенціальна енергія · Механічна робота · Потужність |
|
Основні принципи |
|
Важливі теми |
|
Формулювання |
Здебільшого використовуються для математичного опису обертання абсолютно твердого тіла, при якому одна система координат — система спостерігача, а інша жорстко зв'язується з тілом.
Правильні кути Ейлера
Класичне визначення
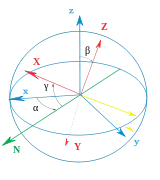
Кути Ейлера це спосіб представлення просторової орієнтації будь-якої системи відліку (система координат або базис) як набір трьох кутів повороту починаючи від стандартного положення, що представлене іншої системою відліку (що називається фіксованою чи початковою системою відліку або стандартним базисом). Початкова система відліку це початкова орієнтація від якої система координат уявно обертається для того, щоб збігтися з фактичною орієнтацією. Далі осі початкової системи відліку позначатимуться як x,y,z, а осі системи відліку, яка повертається в просторі позначаються великими літерами X,Y,Z. В геометрії і фізиці, координатна система, яка обертається часто зображається строго прив'язаною до деякого твердого тіла. В такому випадку її називають «локальною» системою координат, і вона призначена для того, щоб представляти як позицію тіла так і його орієнтацію в просторі.
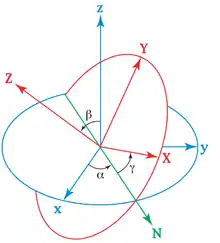
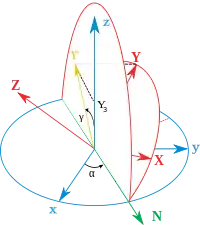
Геометричне визначення кутів Ейлера базується на двох вищезгаданих системах відліку (початкової і повернутої) і додатковій осі яка називається лінією вузлів. Лінія вузлів (N) є перетином координатних площин xy і XY. Іншими словами, це лінія яка проходить через спільний початок обох систем координат, і є перпендикулярною до площини zZ, на який знаходяться обидві осі z і Z.
Три кути Ейлера визначаються наступним чином:
- Кут прецесії α (або ) це кут між віссю x і віссю N.
- Кут нутації β (або ) це кут між віссю z і віссю Z.
- Кут власного обертання γ (або ) це кут між віссю N і віссю X.



В цьому визначенні мається на увазі, що:
- α задає кут обертання довкола осі z,
- β задає кут обертання довкола осі N,
- γ задає кут обертання довкола осі Z.
Якщо β є нульовим, тоді обертання довкола осі N не відбувалося. Як наслідок, Z збігається із z, α і γ задають поворот довкола однієї і тієї ж осі (z), і кінцеве положення можна отримати лише за допомогою повороту довкола осі z, на значення кута, яке дорівнює α+γ.
Замість позначень α, β, γ вживаються також ψ, θ, φ.
Кут прецесії і кут власного обертання змінюється в межах від нуля до 2π. Кут нутації — від нуля до π.
Альтернативне визначення
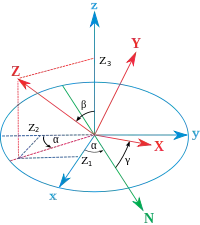
Обертова система відліку XYZ в початковому стані може бути зображення як така, що повністю збігається з xyz, перед тим як відбуваються три елементарні обертання задані кутами Ейлера. Його послідовні орієнтації можуть бути позначені таким чином:
- x-y-z, або x0-y0-z0 (початкова)
- x’-y’-z’, або x1-y1-z1 (після першого обертання)
- x″-y″-z″, або x2-y2-z2 (після другого обертання)
- X-Y-Z, або x3-y3-z3 (фінальна)
Для вищезазначеної послідовності поворотів, лінія вузлів N може визначатися як положення осі X після першого елементарного повороту. Таким чином, N може бути позначена як x’. Крім того, оскільки третій елементарний поворот відбувається довкола осі Z, воно не змінює положення осі Z. Таким чином Z збігається з z″. Це дає змогу спростити визначення кутів Ейлера наступним чином:
- α (або ) задає кут повороту довкола осі z,
- β (або ) задає кут повороту довкола осі x’,
- γ (або ) задає кут повороту довкола осі z″.
Геометричне виведення
Найпростіший спосіб отримання кутів Ейлера для заданої системи відліку це записати три задані вектори у вигляді стовпців матриці і порівняти його з виразом теоретичної матриці. Звідси, можна обрахувати три кути Ейлера. Однак, той самий результат можна досягти уникаючи матричних обчислень, застосовуючи геометричні. Припустимо: існує система відліку із одиничними векторами (X, Y, Z).
З основного малюнку витікає що:

А, оскільки

отримаємо

Оскільки є подвійною проекцією одиничного вектора,



Існує аналогічна побудова для , за допомогою проектування його спершу на площину, задану віссю z і лінією вузлів. Оскільки кут між площинами дорівнює і , з відси отримаємо:





урешті-решт, використовуючи функцію оберненого косинуса,



Цікаво відзначити, що зворотня функція косинуса має два можливих значення для аргументу. У цьому геометричному описі лише одне є правильним. Коли кути Ейлера задаються як послідовність обертань, всі рішення можуть бути дійсні, але буде лише один який знаходиться в допустимому діапазоні кутів. Це тому що послідовність поворотів, для досягнення результуючої системи відліку не є унікальною, якщо немає попередньо заданих діапазонів.[1]
З ціллю спрощення обчислень, може бути корисним представити кути з використанням функції atan2(y,x):


Зв'язок між рухами карданного підвісу
Базові Ейлерові обертання визначаються зміною одного із кутів Ейлера, в той час як інші залишаються незмінними. Повороти Ейлера ніколи не визначаються в термінах зовнішньої системи відліку, або в термінах супутньої обертової системи відліку тіла, а визначаються як поєднання. Вони являють собою систему змішаних осей обертання, в якій перший кут рухає лінію вузлів довкола зовнішньої осі z, другий обертається довкола лінії вузлів, а третій визначає власне обертання довкола осі, яка пов'язана з тілом що рухається.
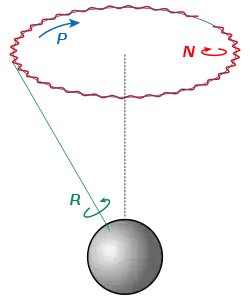
Ці оберти називаються прецесією, нутацією, і власне обертання. Як приклад, розглянемо дзиґу. Дзиґа обертається довкола власної осі симетрії; це відповідає власному обертанню. Вона також обертається довкола своєї осі обертання, при чому центр мас обертається довкола осі обертання; це обертання є прецесією. І нарешті, дзиґа може коливатися вверх-вниз; кут нахилу буде кутом нутації. В той час як всі ці обертання задаються в окремих системах відліку, лише прецесія буде правильним оператором повороту, і лише прецесія може бути задана в матриці загального вигляду в базисі простору.
Аналогія з гімбалом (карданним підвісом)
Маємо набір рамок, які здатні рухатись по відношенню до попередньої лише на один кут, як карданний підвіс, в якому існує зовнішня фіксована рама, одна остання рамка і дві по середині, які називаються "проміжними кільцями". Дві в середині рухаються як два кільця підвісу, що дає змогу останній рамці приймати будь-яке положення у просторі.
В цих умовах, кожний поворот Ейлера здійснюється на одному з кілець, незалежно від інших.
Проміжні системи відліку
Кільця підвісу задають деякі проміжні системи відліку. Вони також можуть задаватися статично. Маємо деякі вектори i, j і k довкола осей x, y і z, і вектори I, J, K довкола X, Y і Z, і вектор N на лінії вузлів, деякі проміжні системи відліку можуть бути отримати у вигляді векторного добутку, наступним чином:
- початкова: [i,j,k] (де k = i × j)
- перша: [N,k × N,k]
- друга: [N,K × N,K]
- фінальна: [I,J,K]
Ці проміжні системи відліку еквівалентні кільцям підвісу. Кожна наступна відрізняється від попередньої лише одним елементарним поворотом. Це доказує що:
- Будь-яка фінальна система відліку може бути отримана від початкової системи відліку поєднуючи три оберти.
- Величина цих поворотів і є кутами Ейлера цільової системи відліку.
Зв'язок із іншими представленнями
Кути Ейлера є лише одним із способів задавання орієнтації в просторі. Існують і інші, і існує можливість переходити від одного до іншого представлення.
Матриця повороту
Будь-яку просторову орієнтацію можна задати поєднанням трьох елементарних обертань, починаючи від відомої стандартної орієнтації. Так само, будь-яка матриця повороту R може бути розкладена у вигляді добутку трьох елементарних матриць повороту. Наприклад:

є матрицею повороту, яка може використовуватись для представлення композиції внутрішніх обертань довкола осей x-y’-z″.
Матриця повороту виражається через кути Ейлера так:


Однак, визначення елементарних матриць повороту X, Y, Z, і порядок їхнього добутку залежить від вибору зробленому при обрахунку задачі, щодо визначення матриць повороту і кутів Ейлера (див., наприклад, невизначеності у визначенні матриці повороту). Виникають труднощі з тим, що існують різні комбінації загальноприйнятих визначень, які використовуються в різному контексті. Наступна таблиця узагальнює ці різновиди матриць:
- Кожна матриця призначена для роботи за допомогою перемноження векторів стовпців (див невизначеності у визначенні матриці повороту)
- Кожна матриця задає активний поворот (утворюючі і складені матриці мають змінювати координати векторів визначених в початковій фіксованій системі відліку і в результаті давати координати повернутого вектора в тій самій системі відліку).
- Кожна матриця представляє собою композицію внутрішніх поворотів (довкола осей повороту системи відліку, яка обертається).
- Застосовуються системи відліку, що відповідають правилу правої руки, і те саме правило правої руки застосовується для визначення знаків кутів α, β, γ.
Для спрощення, в наступній таблиці використовуються наступні позначення:
- 1, 2, 3 представляють собою кути α, β, γ.
- X, Y, Z це матриці, які задають елементарні обертання довкола осей x, y, z фіксованої системи відліку (тобто, X1 означає поворот довкола осі x на кут α).
- s і c позначають синус і косинус (тобто, s1 означає синус кута α).
- Кожна матриця позначається формулою, яка використовувалася для її обрахунку. Якщо , називаємо її .


Правильні кути Ейлера Кути Тейта-Брайана












Для того щоб змінити формули для протилежного напрямку обертання, необхідно змінити знак функцій синуса. Для того, щоб змінити функціх для пасивних обертань, необхідно транспонувати матриці.
Кватерніони
Одиничні кватерніони, що також мають назву параметри Ейлера-Родрігеса, забезпечують інший механізм для представлення обертання в тривимірному просторі.
Представлення повороту в тривимірному просторі у вигляді одиничних кватерніонів на відміну від матриць має деякі переваги:
- Конкатенація обертань обчислюється швидше і чисельно більш стабільна.
- Виділення кута повороту і осі обертання є простішим.
- Інтерполяція є більш простою. Див. приклад slerp (лінійна інтерполяція на сфері).
- Кватерніони не мають проблеми блокування обертання, на відміну від кутів Ейлера.
Геометрична алгебра
Інше представлення прийшло із геометричної алгебри (ГА). ГА це вищий рівень абстракції, в якій навіть кватерніони є підалгеброю. Головним інструментом ГА є ротор де кут повороту, вісь обертання (унарний вектор) і псевдоскаляр (тривектор в )





Кінематичні рівняння Ейлера
Компоненти вектора кутової швидкості у зв'язаній із тілом системі координат виражаються через похідні від Ейлерових кутів за допомогою формул, які називаються кінематичними рівняннями Ейлера.



Джерела
- Єжов С. М., Макарець М. В., Романенко О. В. Класична механіка. — К. : ВПЦ "Київський університет", 2008. — 480 с.
- Федорченко А. М. Теоретична механіка. — К. : Вища школа, 1975. — 516 с.
- Голдстейн Г. Классическая механика. — М. : Наука, 1975. — 416 с.