Управління з прогнозуючими моделями
Управління з прогнозуючими моделями або Прогнозне керування (англ. Model Predictive Control, MPC або англ. Receding Horizon Control, RHC) — один з сучасних методів теорії управління динамічними системами, заснований на знаннях динамічних характеристик процесів. Метод є розвитком класичного управління з негативним зворотнім зв'язком, в якому враховується передбачення поведінки об'єкта управління на різні типи вхідних впливів. Застосовується з початку 80-х років XX століття, в основному, в управлінні виробничими процесами, наприклад в хімічній промисловості, енергетиці тощо.
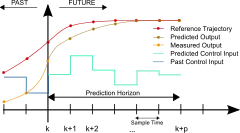
Регулятор покладається на емпіричну модель керованого процесу для того, щоб передбачити подальшу його поведінку, ґрунтуючись на попередніх значеннях змінних стану.
Модель об'єкта управління може бути лінійною або нелінійною.
Стратегія управління обирається такою, щоб враховувати взаємозв'язки між параметрами, що описують стан об'єкта управління, обмеження керуючих пристроїв та можливості обрання найкращої траєкторії зміни станів системи в множині припустимих станів.
