Епіполярна геометрія
Епіполярна геометрія - це геометрія стерео зору . Коли дві камери розглядають 3D-сцену з двох різних позицій, існує ряд геометричних співвідношень між 3D-точками та їх проєкціями на 2D-зображення, що призводять до обмежень можливих положень точок зображення. Ці співвідношення виводяться на основі припущення, що камери можуть бути апроксимовані моделлю камери-обскури.
Дві камери фотографують одну і ту ж сцену з різних точок зору. Потім епіполярна геометрія описує співвідношення між двома результуючими зображеннями.
Визначення
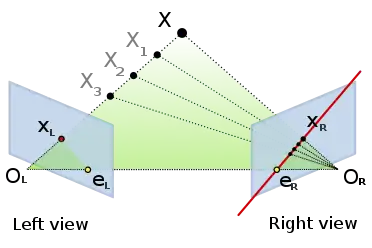
На малюнку нижче зображено дві камери-обскури, які дивляться на точку X. У реальних камерах площина зображення фактично знаходиться за фокусним центром і створює зображення, симетричне щодо фокусного центру об’єктива. Однак тут проблема спрощується шляхом розміщення віртуальної площини зображення перед фокальним центром, тобто оптичним центром кожної лінзи камери, щоб отримати неперевернуті зображення. O L і O R представляють центри симетрії двох об'єктивів камер. X представляє певну точку у тривімірному просторі. Точки x L і x R - це проєкції точки X на площини зображення.
Кожна камера отримує 2D-зображення тривимірного світу. Це перетворення з 3D у 2D називається проєкцією в перспективі та описується моделлю камери-обскури. Загальноприйнято моделювати цю операцію проєкції за допомогою променів, які виходять від камери, проходячи через її фокальний центр. Кожному проміню проміню відповідає одна точка на зображенні.
Епіполь або епіполярна точка
Оскільки оптичні центри об'єктивів камер різняться, кожен центр можна спроєктувати на окрему точку в площині зображення іншої камери. Ці дві точки зображення, позначені e L і e R, називаються епіполями або епіполярними точками . Обидва епіполі e L і e R у своїх відповідних площинах зображення і обидва оптичні центри O L і O R лежать на одній 3D-лінії.
Епіполярна лінія
Лінія O L - X лівої камери розглядається як точка, оскільки вона знаходиться на одній лінії з оптичним центром об'єктива цієї камери. Однак права камера бачить цю лінію як лінію в площині зображення. Ця лінія ( e R - x R ) у правій камері називається епіполярною лінією . Симетрично лінія O R - X розглядається правою камерою як точка, а лівою камерою - епіполярною лінією e L - x L.
Епіполярна площина
Точки X, O L & O R утворюють площину, яка називається епіполярною площиною . Епіполярна площина перетинає площину зображення кожної камери по епіполярнії лінії. Усі епіполярні площини та епіполярні лінії перетинають епіполь незалежно від того, де знаходиться Х.
Епіполярне обмеження та тріангуляція
Якщо взаємне розташування двох камер відомо, це призводить до двох важливих наслідків:
- Припустимо, що точка проєкції x L відома та епіполярна лінія e R - x R відома, і точка X проєктується на правому зображенні на точку x R, яка повинна лежати на цій конкретній епіполярній лінії. Це означає, що для кожної точки, що спостерігається на одному зображенні, одна і та ж точка повинна спостерігатися на іншому зображенні на відомій епіполярній лінії. Це забезпечує епіполярне обмеження : проєкція X на праву площину камери x R повинна міститися в е R - x R епіполярній лінії. Усі точки X, напр X 1, X 2, X 3 на лінії O L - X L підтвердять це обмеження. Це означає, що можна перевірити, чи відповідають дві точки одній 3D-точці. Епіполярні обмеження також можуть бути описані істотною матрицею або фундаментальною матрицею між двома камерами.
- Якщо точки x L і x R відомі, відомі також їхні проєкційні лінії. Якщо дві точки зображення відповідають одній і тій же 3D-точці X, лінії проєкції повинні точно перетинатися в точці X. Це означає, що X можна обчислити за координатами двох точок зображення, процес називається тріангуляцією .
Спрощені випадки
Епіполярна геометрія спрощується, якщо дві площини зображення камери збігаються. У цьому випадку епіполярні лінії також збігаються ( e L - X L = e R - X R ). Крім того, епіполярні лінії паралельні лінії O L - O R між центрами проєкції і на практиці можуть бути суміщені з горизонтальними осями двох зображень. Це означає, що для кожної точки на одному зображенні можна знайти відповідну точку на іншому зображенні, дивлячись лише вздовж горизонтальної лінії. Якщо камери неможливо розташувати таким чином, координати зображення з камер можуть бути спроєктовані на спільну площину. Цей процес називається ректифікацією зображень .
Дивитися також
Посилання
- Richard Hartley and Andrew Zisserman (2003). Multiple View Geometry in computer vision. Cambridge University Press. ISBN 0-521-54051-8.
- Quang-Tuan Luong. Learning Epipolar Geometry. Artificial Intelligence Center. SRI International. Процитовано 4 березня 2007.
- Robyn Owens. Epipolar geometry. Процитовано 4 березня 2007.
- Linda G. Shapiro and George C. Stockman (2001). Computer Vision. Prentice Hall. с. 395–403. ISBN 0-13-030796-3.
- Vishvjit S. Nalwa (1993). A Guided Tour of Computer Vision. Addison Wesley. с. 216–240. ISBN 0-201-54853-4.
- Roberto Cipolla and Peter Giblin (2000). Visual motion of curves and surfaces. Cambridge University Press, Cambridge. ISBN 0-521-63251-X.