Зв'язана система координат літака
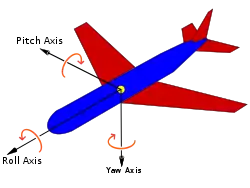
Зв'язана система координат літака — це система координат, яка використовується для аналізу руху повітряних суден під час польоту. Літальний апарат під час польоту може вільно повертатися відносно трьох осей: Поперечна вісь (англ. pitch), ніс літака рухається вниз або вверх довкола осі яка проходить від одного крила до іншого, Вертикальна вісь (англ. yaw), повороти вліво або вправо по курсу довкола осі яка проходить зверху вниз; і Поздовжня вісь (англ. roll), оберти довкола осі що проходить від хвоста до носа літака. Ці осі є системою координат і рухаються разом з літаком, а також обертаються відносно поверхні землі разом із літаком. Ці терміни також застосовувалися і по відношенню до космічних кораблів коли був розроблений перший пілотований людиною космічний апарат наприкінці 1950-х років.
Ці повороти створюються за допомогою моментів сил, що виводять літак із рівноваги і змушують рухатись довкола основних осей. У літаку, це відбувається завдяки повороту керуючих поверхонь, які змінюють розподіл загальної аеродинамічної сили відносно центру мас літака. Стерно висоти (рухомі поверхні на горизонтальному хвості) змушують рухатись довкола поперечної осі, стерно напрямку вертикальна рухома поверхня хвоста дозволяє змінювати курс вліво-вправо, і елерон (закрилки на крилах, які рухаються в протилежних напрямках) створюють оберти довкола поздовжньої осі. У космічному кораблі, моменти зазвичай створюються реактивною системою управління що складається з невеликих двигунів, що використовуються для створення асиметричної тяги літального апарату.
Осі координат
- Вертикальна вісь, або вісь никання — вісь, яка проходить зверху вниз, перпендикулярно відносно двох інших осей.
- Поперечна вісь, вісь тангажу — вісь, яка проходить паралельно крилам літака і направлена зліва на право для пілота літака.
- Поздовжня вісь, вісь крену — вісь проходить через кузов літального засобу від хвоста до носа. Паралельно до ватерлінії.
Зазвичай ці осі позначають літерами X, Y і Z, де X використовується для поздовжньої осі, але буває використовують і інші варіанти.
Зв'язок з іншими системами осей
Ці осі пов'язані з головними осями інерції, але не є тим самим. Це осі геометричної симетрії, без уваги на розподіл мас літака.
В авіаційній і авіаційно-космічній техніці власні обертання довкола цих трьох осей часто називаються кутами Ейлера, але це вступає в протиріччя з використанням їх в інших ситуаціях. Обчислення кутів повороту схоже на обчислення формул тригранника Френе. Виконання повороту у власній системі відліку еквівалентно добутку її на характеристичну матрицю (матрицю, яка містить вектори системи відліку як колонки) на матрицю обертання.