Метод рухливих клітинних автоматів
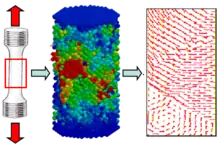
Метод рухливих клітинних автоматів (MCA, від англ. movable cellular automata) — це метод обчислювальної механіки деформованого твердого тіла, заснований на дискретному підході. Він поєднує переваги методу класичних клітинних автоматів і методу дискретних елементів. Важливою перевагою методу МСА є можливість моделювання руйнування матеріалу, включаючи генерацію пошкоджень, поширення тріщин, фрагментацію і перемішування речовини. Моделювання саме цих процесів викликає найбільші труднощі в методах механіки суцільних середовищ (метод скінченних елементів, метод скінченних різниць тощо), що є причиною розробки нових концепцій, наприклад, таких як перідинаміка. Відомо, що метод дискретних елементів дуже ефективно описує поведінку гранульованих середовищ. Особливості розрахунку сил взаємодії між рухомими клітинними автоматами дозволяють описувати в рамках єдиного підходу поведінку як гранульованих, так і суцільних середовищ. Так, при прагненні характерного розміру автомата до нуля формалізм методу MCA дозволяє перейти до класичних співвідношень механіки суцільного середовища.
 Рухливі клітинні автомати активно змінюють своїх сусідів за рахунок розриву існуючих зв'язків між автоматами і утворення нових зв'язків (моделювання контактної взаємодії) | |
| Тип методу | |
|---|---|
| Континуальний/Дискретний | Дискретний |
| Аналітичний/Чисельний | Чисельний |
| Характеристики | |
| Зазнав впливу | Клітинний автомат, Метод дискретних елементів |
| Це метод | Обчислювальної механіки |
Основні положення методу
У рамках методу MCA об'єкт моделювання описується як набір взаємодіючих елементів / автоматів. Динаміка безлічі автоматів визначається силами їх взаємодії і правилами для зміни їх стану. Еволюція цієї системи в просторі і в часі визначається рівняннями руху. Сили взаємодії та правила для зв'язаних елементів визначаються функціями відгуку автомата. Ці функції задаються для кожного автомата. Протягом руху автомата наступні нові параметри клітинного автомата розраховуються: Ri - радіус-вектор автомата; Vi - швидкість автомата; i - кутова швидкість автомата; i - вектор повороту автомата; mi - маса автомата; Ji - момент інерції автомата.


Нова концепція - концепція сусідів
Нова концепція методу MCA заснована на уявленні стану пари автоматів (пов'язує пару взаємодіючих автоматів) у додаток до звичайного стану окремого автомата. Зауважимо що облік цього визначення дозволяє перейти від статичної сіткової концепції до концепції сусідів. В результаті цього, автомати мають можливість змінювати своїх сусідів шляхом перемикання стану (залежностей) пар.
Визначення параметрів стану пари автоматів
Введення нового типу стану вимагає нового параметра використовується як критерію перемикання в стан пов'язані. Це визначається як параметр перекриття автоматів hij. І так, зв'язок клітинних автоматів характеризується величиною їх перекриття.

Початкова структура формується установкою властивостей особливого зв'язку між кожною парою сусідніх елементів.
Критерії перемикання пари автоматів у стан пов'язані
У порівнянні з методом класичних клітинних автоматами в методі MCA не тільки одиничний автомат але і такожзв'язку автоматів можуть переключатися. Відповідно до концепції бістабільних автоматів вводиться два стани пари (взаємозв'язок):
| пов'язані | обидва автомата належать одному суцільному тілу |
| незв'язані | кожен автомат належить різних тіл або фрагментів пошкодженого матеріалу |
Отже,зміна стану зв'язку пари визначається відносним рухом автоматів, і середовище формується такими парами може бути названабістабільної середовищем.
Рівняння руху MCA
Еволюція MCA середовища описується наступнимирівняннями трансляційного руху:

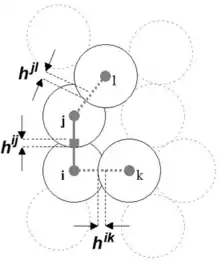
Тут mi це маса автомата i, pij це центральна сила діє між автоматами і та j, C (ij,ik) це особливий коефіцієнт асоційований з перенесенням параметра h з пари ij до ik, ψ (αij,ik) це кут між напрямками ij і ik.
Обертальні рухи також можуть бути враховані з точністю обмеженою розміром клітинного автомата. Рівняння обертального руху можуть бути записані таким чином:

Тут Θij кут відносного повороту (це параметр переключення подібно hij трансляційного руху), qij(ji) це відстань від центру автомата i (j) до точки контакту з автоматом j (i) (кутовий момент), τij це парне тангенціальне взаємодія, S (ij, ik (jl)) це особливий коефіцієнт асоційований з параметром перенесення Θ від однієї пари до іншої (це схоже на C (ij, ik (jl)) з рівнянь трансляційного руху).
Слід зазначити, що рівняння повністю аналогічні рівнянням руху для багато-часткової середовища.
Визначення деформації пари автоматів
Зсув пари автоматів Безрозмірний параметр деформації для усуненняi j пари автоматів записується як:

У цьому випадку:

де Δt тимчасової крок, Vnij - залежна швидкість. Обертання пари автоматів може бути пораховано аналогічно з зв'язком останнього змішання.
Опис необоротної деформації в методі MCA
Параметр εij використовується як міра деформації автомата i взаємодіє з автоматом j. Де qij - відстань від центру автомата i до точки його контакту з автоматом j; Ri = di / 2 (di - розмір автомата i).
Наприклад титановий зразок при циклічному навантаженні (розтяг-стиск). Діаграма деформування показана на наступному малюнку:
| схема навантаження | діаграма деформування |
|---|---|
 |
 |
| (Червоні точки - експериментальні дані) |
Переваги методу MCA
Завдяки рухливості кожного автоматаметод MCA дозволяє безпосередньо враховувати такі події як:
- Перемішування мас
- Ефект проникнення
- Хімічні реакції
- Інтенсивні деформації
- Фазові перетворення
- Накопичення ушкоджень
- Фрагментація і тріщини
- Генерація і розвиток ушкоджень
Використовуючи різні граничні умови різних типів (жорсткі, пружні, в'язко-пружні, т.д.) можна імітувати різні властивості навколишнього середовища, що містить модельовану систему. Можна моделювати різні режими механічного навантаження (розтяг, стиск, зсув, т.д.) за допомогою налаштувань додаткових станів на кордонах.
Література
- Psakhie, S.G.; Horie, Y.; Korostelev, S.Yu.; Smolin, A.Yu.; Dmitriev, A.I.; Shilko, E.V.; Alekseev, S.V. (1995). Method of movable cellular automata as a tool for simulation within the framework of mesomechanics. Russian Physics Journal (Springer New York) 38 (11): 1157-1168. doi:10.1007/BF00559396.
- Псахье, С.Г.; Коростелев, С.Ю.; Смолин, А.Ю.; Дмитриев, А.И.; Шилько, Е.В.; Моисеенко, Д.Д.; Татаринцев, Е.М.; Алексеев, С.В. (1998). Метод подвижных клеточных автоматов как инструмент физической мезомеханики материалов. Физическая мезомеханика (Учреждение Российской академии наук Институт физики прочности и материаловедения Сибирского отделения РАН (ИФПМ СО РАН)) 1 (1): 95-108. Процитовано 3 березня 2010.
- Псахье, С.Г.; Остермайер, Г.П.; Дмитриев, А.И.; Шилько, Е.В.; Смолин, А.Ю.; Коростелев, С.Ю. (2000). Метод подвижных клеточных автоматов как новое направление дискретной вычислительной механики. I. Теоретическое описание. Физическая мезомеханика (Учреждение Российской академии наук Институт физики прочности и материаловедения Сибирского отделения РАН (ИФПМ СО РАН)) 3 (2): 5–13. Процитовано 3 березня 2010.
- Psakhie, S.G.; Horie, Y.; Ostermeyer, G.P.; Korostelev, S.Yu.; Smolin, A.Yu.; Shilko, E.V.; Dmitriev, A.I.; Blatnik, S.; Spegel, M.; Zavsek, S. (December 2001). Movable cellular automata method for simulating materials with mesostructure. Theoretical and Applied Fracture Mechanics (Elsevier Science Ltd.) 37 (1-3): 311-334. doi:10.1016/S0167-8442(01)00079-9. Архів оригіналу за 19 липня 2011.
- Псахье, С.Г.; Смолин, А.Ю.; Стефанов, Ю.П.; Макаров, П.В.; Чертов, М.А. (2004). Моделирование поведения сложных сред на основе совместного использования дискретного и континуального подходов. Письма в ЖТФ 30 (17): 7–13. Процитовано 3 березня 2010.
- Shimizu, Y.; Hart, R.; Cundall, P. (2004). Numerical modeling in Micromechanics via Particle Methods. ISBN 9058096793. Процитовано 3 березня 2010.
- Gnecco, E.; Meyer E. (Eds.) (2007). Fundamentals of friction and wear on the Nanoscale. ISBN 9783540368069. Процитовано 3 березня 2010.
- Yunliang, Tan; Guirong, Teng; Haitao, Li. MCA Model for Simulating the Failure of Microinhomogeneous Materials. Journal of Nanomaterials (Hindawi Publishing Corporation) 2008: 1-7. doi:10.1155/2008/946038. 946038.
- Фомин, В.М.; Андреев А.Н. и др. (2008). Механика - от дискретного к сплошному. Рос. акад наук, Сиб. отд-ние, Ин-т теоретической и прикладной механики им. С.А. Христиановича. с. 344. ISBN 978-5-7692-0974-1. Архів оригіналу за 06.10.2011. Процитовано 3.03.2010.
- Смолин, А.Ю.; Роман, Н.В.; Добрынин, С.А.; Псахье, С.Г. (2009). О вращательном движении в методе подвижных клеточных автоматов. Физическая мезомеханика (Учреждение Российской академии наук Институт физики прочности и материаловедения Сибирского отделения РАН (ИФПМ СО РАН)) 12 (2): 17–22. Процитовано 3 березня 2010.
- Popov, Valentin L. (2009). Kontaktmechanik und Reibung (Ein Lehr- und Anwendungsbuch von der Nanotribologie bis zur numerischen Simulation). Springer Berlin Heidelberg. ISBN 9783540888369. doi:10.1007/978-3-540-88837-6. . doi:10.1007/978-3-540-88837-6. Пропущений або порожній
|title=(довідка) - Добрынин, С.А. (2010). Развитие метода подвижных клеточных автоматов для моделирования генерации и распространения упругих волн при контактном взаимодействии твердых тел. Томск: Диссертация … кандидата физико-математических наук. с. 130. Процитовано 3.03.2010.
- Добрынин, Сергей (2011). Компьютерное моделирование методом подвижных клеточных автоматов. Saarbrücken Germany: LAP LAMBERT Academic Publishing. с. 132. ISBN 978-3-8443-5954-1. Процитовано 19.11.2011.
Програмне забезпечення
- MCA software package
- Програма для моделювання матеріалів в дискретно континуальному підході «FEM+MCA»: Номер державної реєстрації в ОФАП (Патент): 50208802297 / Смолин А. Ю., Зелепугин С. А., Добрынин С. А.; заявник та організація-розробник рос. ГОУ ВПО Томский государственный университет. — зарег. 28.11.2008; свідоцтво ОФАП № 11826 від 01.12.2008.

{kind=link}