Місячний корабель
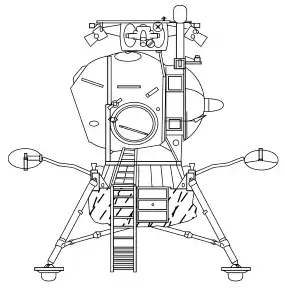
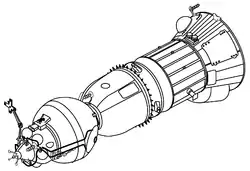
Місячний корабель (11Ф94) — радянський космічний апарат, призначений для доставки космонавта на місячну поверхню і його вдалого повернення на орбіту й зістикування з місячним орбітальним кораблем. Був першим і єдиним пілотованим апаратом, реально сконструйованим і побудованим в СРСР для польотів за межами атмосфери.
| Місячний корабель — ЛК (рос. Лунный корабль) | ||
|---|---|---|
 Радянський місячний корабель | ||
| Опис | ||
| Призначення: | Місячний посадковий модуль | |
| Індекс | 11Ф94 | |
| Екіпаж: | 1 LK pilot | |
| Габаритні розміри | ||
| Висота: | 5.20 м | |
| Діаметр: | 4.50 м | |
| Об'єм: | 5 м ³ | |
| Маса | ||
| Загальна: | 5560 кг | |
| Двигунна установка | ||
| Двигуни орієнтації (N2O4/UDMH) x 4: | 390 Н | |
| Двигуни гострої орієнтації (N2O4/UDMH+C2H8N2) x 4: | 98 Н | |
| Питомий імпульс | 245 кг/с | |
| Головний двигун РД-858 (N2O4+C2H8N2) x 1: | 20100 Н | |
| Резервний двигун РД-859 (N2O4+C2H8N2) x 2: | 20100 Н | |
| ΔV | 2700 м/с | |
| Енергетична система | ||
| Джерело живлення | 30.00 кВт-год | |
| Енергоспоживання | 0.5 кВт | |
| Ресурс | ||
| Тривалість автономного функціонування:: | 30 діб | |
Створення подібного апарата було необхідним в рамках радянської програми висадки на Місяць Н1-Л3 і був її невід'ємним й навіть ключовим елементом. Його вдалі льотні випробування показали високу надійність усіх систем, однак за цільовим призначенням він не використовувався. Технологічно та функціонально радянський місячний корабель поступався американському LM. Одним з основних недоліків була менша місткість апарата, менша вантажопідйомність. В процесі розробки усі системи пройшли повне відпрацювання і мали надзвичайно високий рівень надійності.

Історія створення
Проект Н1-Л3 був занадто великим для одного підприємства (у США на «Аполлон» працювало понад 20000 організацій). ОКБ-1 Корольова призначили головним по Н1-Л3. Сам місячний корабель доручили розробити ОКБ-586 (КБ «Південне» у Дніпропетровську), а керівником цього напрямку призначили Янгеля.
У загальному вигляді проект Н1-Л3 закінчили 30 грудня 1964 року, тоді ж визначили попередні терміни виконання всіх етапів. Перший запуск Н1 мав відбутися 1966 року, а перший космонавт на Місяці зміг би висадиться 1967-68 року, що дозволяло б випередити американців, які призначили висадку на 1969 рік.
Коли в «Південному» почали детальну розробку місячного корабля, виявилося, що попередні оцінки маси МК були значно заниженими, і вкластися у встановлену раніше масу було неможливо. Причиною був занадто грубий ескізний підхід до конструкції МК. Наприклад, горизонтальна швидкість апарату при посадці не дозволяла радару-висотоміру, який планували встановити на МК, визначити реальну висоту. Швидкість апарату, оцінена на одній з ділянок польоту в 30-40 м/с, насправді становила б 200–300 м/с. У першому варіанті МК важив лише 2,2 т, причому був розрахований на двох осіб. Для усунення цих та інших недоліків довелося збільшувати масу апарату до 5,5 т, а екіпаж зменшити до одного космонавта.
Спочатку Янгель хотів залишити місце для другого космонавта у місячній кабіні, але це було неможливим. Зменшення маси стало головним завданням для конструкторів — за кожне нововведення, яке зменшувало б масу місячного корабля на один кілограм, призначалася премія 60 радянських рублів. Покращенням деяких систем орбітальної частини вдалося полегшити апарат на 500 кг.
Визначення поточної швидкості і висоти після відокремлення блоку Д також було проблематичним. Від ефективності роботи цієї системи залежала маса необхідного палива і всі пов'язані з цим параметри, такі як розташування і форма паливних баків.
Створена радарна система отримала назву «Планета». Вона мала чотири антени. Перші три створювали промені, віддалені один від одного на 120 градусів, і за зміною частоти сигналу внаслідок ефекту Доплера можна було точно визначити горизонтальну швидкість корабля. Четверта антена була спрямована перпендикулярно до поверхні і визначала висоту. Така система була порівняно простою і надійною, і хоча вона не попрацювала за своїм прямим призначенням, «Планета» показала свою надійність під час польотів АМС серії Е-8 (автоматична доставка місячного ґрунту на Землю).
При випробуванні радара на борту «МіГа-17» вдалось вирішити деякі виявлені проблеми. Через обмеження Мішин (який продовжував роботу померлого Корольова) дозволяв розмістити тільки 280 кг резервного палива, що теж затримувало створення радара-висотоміра, який тепер мав дуже точно проводити вимірювання для уникнення перевитрати палива.
1967 року Янгель повідомив Мішину що місячний корабель буде готовий не раніше 1971 року (тобто з запізненням на три роки). 1968 року програму знову змінили. Спочатку передбачалося здійснити посадку на місячному екваторі, тобто місячний орбітальний корабель мав перебувати на екваторіальній орбіті і щогодини пролітати над місцем посадки місячної кабіни. Це істотно полегшувало зближення і стикування апаратів, але водночас найцікавіші місця для посадки не завжди розташовані саме на екваторі. При виборі іншого місця ускладнювалась процедура зближення місячного відсіку після його старту з Місяця і місячного орбітального корабля, який міг з'являтися над місцем посадки удвічі-втричі рідше.
У такому випадку було три варіанти:
- Місячний корабель обладнувався точною інерційною навігаційною системою, що дозволяла здійснювати складні маневри на навколомісячній орбіті для стикування з орбітальним кораблем.
- Місячний корабель після старту з поверхні поступово змінював свою орбіту до поєднання з орбітою орбітального корабля. У цьому випадку не було потрібне складне навігаційне обладнання.
- Місячний корабель прораховував траєкторію зближення до старту з Місяця, і здійснював стикування за прорахованою схемою.
Американці обрали перший варіант, в радянській програмі віддали перевагу другому. Стикування мало відбуватись на висоті 25-30 км. Оскільки цифрова ЕОМ для цього використовуватись не могла (через її відсутність), розробили дуже ефективну аналогову систему, яка прораховувала необхідні елементи орбіти і моменти включення рушійної установки.
На відміну від цих завдань збереження центру мас було дуже складним. Центр мас не мав зміщуватися більш ніж на 3 см (!). Це вимагало особливої конструкції паливних баків блоку Е і двигунів точної орієнтації. Космонавт у місячній кабіні був значно обмежений у діях. Все обладнання МК довелось розробляти та розміщувати згідно з цими вимогами. Для компенсації зміщення під час посадки і злету, коли маса місячного модуля зменшувалась при витраті палива для роботи двигуна, такі важкі елементи апарату, як батареї, постійно переміщувались.
Частина апарата, яка безпосередньо контактувала з поверхнею, називалась абревіатурою ЛПУ (рос. Лунное посадочное устройство — місячний посадковий пристрій). Крім забезпечення посадки цей модуль був стартовим майданчиком для блоку Е, за допомогою якого місячний корабель злітав з Місяця. На ЛПУ також розміщувалось устаткування, яке використовувалось тільки при спуску або працювало на поверхні Місяця і використовувалось до зльоту з поверхні. Це були радар-висотомір, параболічні антени, хімічні джерела струму, три баки (згодом додали четвертий) з водою для випаровувальної системи охолодження і відеокамера для зйомки роботи космонавта на поверхні. ЛПУ важило 1440 кг при повній масі місячного корабля 5560 кг. Як говорилося вище, через обмеження маси апарату рушійна установка могла перемістити корабель не далі, ніж на 100 метрів від заздалегідь обраного місця. У цьому місці могли перебувати досить великі кратери, тому місячний посадковий пристрій мав забезпечувати нормальну посадку на поверхню і подальший зліт так, щоб апарат міг нормально функціонувати і при утворенні з поверхнею досить великих кутів (до 30 градусів). Це було необхідно і для забезпечення «сліпої» посадки апарата в безпілотному варіанті.
Перед конструкторами постало питання: як саме апарат повинен торкатися Місяця? Мінімальним варіантом було використання трьох посадкових опор, саме така схема використовувалась для посадки на Місяць американських «Сервеєрів» — автоматичних апаратів для дослідження і фотографування поверхні. Для радянського місячного корабля такий варіант не підходив, оскільки він не забезпечував необхідну стійкість і не гарантував збереження центру мас. ЛПУ почали розробляти одразу кілька КБ, і з'явилось багато різних проектів: від кількох опор до особливого посадкового кільця. Врешті-решт, залишились дві можливі схеми: пасивна та активна. У першому випадку апарат сідав на кілька пасивних опор, для чого слід було забезпечити дуже плавний підліт до поверхні. У другому випадку посадкові опори мали власні коригувальні двигуни, які включалися безпосередньо в момент контакту для точного позиціонування апарата.
Для остаточного вибору створили комплекс імітації посадки на місячний ґрунт: велике приміщення заповнене вулканічним туфом з Вірменії (за своїми фізичними властивостями він схожий на реголіт), і в ньому імітували торкання Місяця. Випробування показали, що найкращою є активна схема з використанням твердопаливних двигунів, яку й обрали для місячного корабля.
Формування вигляду корабля
Зовнішній вигляд корабля формувався складно. У будь-якому питанні потрібна була творча знахідка, винахід, оригінальність рішення.
До того часу вже відпрацювали стикування космічних апаратів на орбіті Землі. Корабель мав зістикуватися на орбіті Місяця з орбітальним кораблем. Потрібний був новий стикувальний пристрій, бо існуючі, так звані «штир-конус», не вписувалися у схему через великі лінійні розміри і значну масу. При стикуванні на орбіті Місяця помилок могло бути більше, ніж на орбіті Землі. Все це призвело до висновку, що для Місячної експедиції потрібна була своя стикувальна система. Дефіцит маси позначався на всьому. В американців «Аполлон» і Місячний модуль могли незалежно один від одного здійснювати активне стикування, тобто виконувати динамічні операції по зближенню і причалюванню. Радянська схема передбачала, що Місячний корабель буде «пасивним», тобто МК підтримуватиме тільки положення своїх осей у просторі, а зближення і стикування здійснюватиме Місячний орбітальний корабель. Тому стикувальний агрегат на МК зробили «пасивним».

Він мав сотенну конструкцією з поперечними лінійними розмірами, більшими ніж у агрегату стикувального пристрою «штир-конус» у кілька разів. Це істотно полегшувало стикування кораблів, адже кожна клітинка була мініатюрним «конусом». Визначили місце встановлення стикувального агрегату — на блоці двигунів керування.
Проектування будь-якого космічного апарата передбачає забезпечення його температурних умов. Для Місячного корабля справа ускладнювалася тим, що, крім тепловиділення апаратури, радіаційного нагріву від Сонця, необхідно було враховувати і зовнішні температурні умови Місяця. Відомо, що на Місяці в тіні температура поверхні досягає −200 ° С, а на освітленій частині доходить до +130 ° С. Це враховувалося при виборі місця посадки — поблизу кордону знаходження тіні. Радіатор системи терморегулювання розташували на кільці вздовж стикувального вузла. Його основною функцією було скидання надлишків тепла у космос завдяки підбору відповідних коефіцієнтів випромінювання забарвлення.
Істотний вплив на зовнішність корабля зробили вибір і розміщення елементів електроживлення. Вибір залежав від необхідної енергії і часу споживання. З урахуванням обмеженої (до двох діб) активної роботи корабля, обрали хімічні джерела струму — акумуляторні батареї. Їх слід було розташувати як на злітній, так і на посадковій частині. Для цього зробили спеціальний каркас. Повісили три батареї на каркас ЛПУ і дві зовні на приладовий відсік. Зовнішнє розташування дозволяло встановлювати їх в останній момент перед стартом, адже розробники гарантували працездатність акумуляторів без підзарядки близько трьох місяців.
Особливі проблеми при компонуванні виникли з розташуванням посадкового радіолокатора. Адже він мав «дивитися» вниз, і розміри його були значні. Довелося відійти від традиційних форм герметичного приладового відсіку, встановленого на ЛПЗ. Він перестав бути круглим, під ним і розташували локатор. Зв'язок МК з орбітальним кораблем і Землею забезпечували різні антени метрового і дециметрового діапазонів. Багато клопоту було з гостронаправленою параболічною антеною. Її слід було вкласти у транспортабельне положення, а після посадки — розкрити. Встановили спеціальні дециметрові антени-«морквини», антеною метрового діапазону була кільцева щілина між радіатором і стикувальним вузлом.
За допомогою кабель-щогли здійснювався електричний і гідравлічний зв'язок злітної і посадкової частин.
Компонування усього головного блоку на носії було таким, що Місячний корабель опинився під оболонками перехідного відсіку і головного обтічника у значному заглибленні. Головний обтічник скидався під час виведення ракети-носія на орбіту, після проходження щільних шарів атмосфери Землі. Щоб вивести з перехідного відсіку МК і не пошкодити зовнішні елементи знадобились спеціальні напрямні, що охоплювали корабель ззовні (їх називали «лижами» через зовнішню подібність). Ці «лижі» кріпилися на опорних ногах посадкового пристрою МК і спирались розпірним амортизованим підкосом у конусні воронки, встановлені у верхній частині кабіни. Після виведення корабля вони відстрілювались, а опорні ноги розкривались у робоче положення.
Конструкція

Кабінний модуль
Оснащення кабіни відбувалось за щойно створюваними правилами космічної ергономіки. Зручність роботи була головною при обладнанні кабіни. Треба було встановити системи, з якими космонавтові належало працювати. Практично всі системи, крім автоматичного режиму, мали ручний. Управління усіма ручними операціями відбувалося з пульта космонавта. Його розробляли під керівництвом головного конструктора С. А. Бородіна. Розташувати пульт перед космонавтом як щиток управління в автомобілі було неможливо, оскільки весь вільний простір був зайнятий ілюмінатором. Довелося розмістити пульт праворуч від ілюмінатора, в зоні, де космонавт міг працювати з ним правою рукою. На пульті розташували навіть глобус Землі.
Проектування МК та інших радянських кораблів здійснювалось так, щоб виконання програми відбувалось практично без участі людини. Так проектувалися корабель Ю. О. Гагаріна «Восток», корабель «Союз». Який психологічний стан буде у космонавта? Особливо коли немає поруч партнера, здатного допомогти в будь-яку хвилину. Тому розробники Місячного корабля мали ще одне надзвичайно складне завдання: здійснити посадку на Місяць, зліт і стикування з орбітальним кораблем в автоматичному режимі. Придумали навіть особливі лебідки для затягування космонавта у кабіну у випадку втрати ним працездатності на Місяці. Контроль роботи систем корабля і самопочуття космонавта здійснювала телевізійна камера, що висіла над головою космонавта.
Перед виходом з кабіни слід було знизити тиск у ній, оскільки внутрішній тиск настільки сильно притискав вихідний люк, що космонавтові відкрити його не вистачило б сил. Спеціальною шлюзовою камерою, такою як на станції «Мир» і на кораблях «Спейс Шаттл», «Буран», був орбітальний відсік корабля Союз-7К-ЛОК. Встановили спеціальний клапан скидання тиску з кабіни, яким керували вручну. Час перебування на поверхні Місяця визначили у кілька годин, що дозволяло здійснити тільки один вихід космонавта на поверхню Місяця.
Незалежно від цього слід було створити спеціальну систему шлюзування, яка дозволяла б у аварійних ситуаціях наповнювати кабіну газовою сумішшю кілька разів. У місячній кабіні існувала загальна система терморегулювання корабля: газорідинний теплообмінник і вентилятор. Вони підтримували необхідний клімат усередині за сигналами відповідних датчиків.
До основної внутрішньокабінної системи входила також система забезпечення газового складу, призначена подавати свіже повітря і прибирати шкідливі домішки. Повітря з балонів високого тиску через редуктор, який знижував тиск до атмосферного, подавався в кабіну через відповідний клапан. Це можна було робити вручну або за командами з Землі. Для поглинання вуглекислого газу, який виділявся, використовувались спеціальні поглинальні патрони. При обмеженому часі перебування в кабіні їхня ефективність була цілком достатньою.
Зовнішній корпус кабіни використовувався для розміщення різних елементів корабля: антен, баків з киснем, агрегатів системи терморегулювання, двигунів орієнтації та інших елементів.
Відсік приладів
Відсік приладів розташовувався у місячному модулі.
До початку розробки місячного модуля прилади від виготівників надходили окремо. Обрана силова схема відсіку приладів і його обмежений обсяг вимагали моноблочної компоновки. Виготівники мали виконувати невластиві для них завдання: забезпечення теплового режиму усередині моноблоку, розробка силової рами, внутрішньоблокових з'єднань тощо. Конструктори були стійкими у своїх вимогах, і у відсіку приладів з'явились моноблок системи управління, моноблок радіотехнічних систем, моноблок системи управління бортовим комплексом і моноблок агрегатів автоматики системи енергопостачання та елементів системи терморегулювання (СТР). На вільних місцях, які залишились, на приладовій рамі розмістили окремі елементи автоматики і клапанів СТР, електронні блоки системи стикування і примісячнення, блоки управління навігаційними приладами. Це покращило масові характеристики та поліпшило ергономіку.
Для виключення нештатних ситуацій уся апаратура мала працювати у комфортних умовах — герметичних, із забезпеченням прийнятних температурних умов; і за аварійного режиму — у вакуумі. Перехід на аварійний режим вимагав термінового зльоту і стикування Місячного корабля з Місячним орбітальним кораблем.
Встановити геометрично неправильну та несиметричну кабіну екіпажу так, щоб її центр мас був точно на центральній осі або осі, крізь яку проходила тяга двигунів, було дуже важко. Зробили спеціальне балансувальне поле. Відносно ракетного блоку весь кабінний модуль міг зміщуватись до 30 мм у будь-який бік, що стало можливим завдяки використанню спеціальних циліндричних стаканів, які довелось вимушено додати до конструкції.
На верхніх кронштейнах, де кріпився блок двигунів, ці балансувальні поля повторили. При розробках з'являються різні моменти, які можуть зміщувати центр мас вже після виготовлення. Для виправлення центрування використали дві хімічні батареї системи електроживлення, розміщені ззовні на відсіку приладів. На рамі для їхнього кріплення зробили спеціальні додаткові місця установок, і після визначення фактичного центру мас можна було без особливих клопотів, переставляючи батареї, досягати потрібного центрування.
З іншого боку на циліндричній частині кабіни вплавили герметичну плату, крізь яку проходили комунікації до частини корабля, яка мала залишатись на Місяці. До неї приєднувалась «кабель-щогла», названа розробниками за аналогією зі стартовими пристроями. Перед злетом корабля вона відстрілювалась і відводилась поворотом від злітної частини.
У верхній частині перехідного відсіку ззовні встановлювались на спеціальній платі чутливі елементи системи управління — два датчики: сонячно-зірковий і зоряний. Їхня плата опиралась на випуклості циліндричної частини, на яких усередині відсіку кріпилась гіроплатформа. Це дозволяло знизити до мінімуму помилки інформації від взаємних похибок. Точність мала вимірюватись до секунди, інакше можна було не прилетіти в зону стикування з Місячним орбітальним кораблем.
Ракетний блок
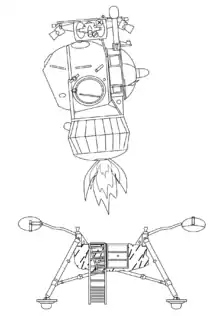
У Місячному кораблі ракетний блок був основним агрегатом. Його маса становила половину маси апарата, він розташовувався в центрі. Для центрування Місячного корабля довелося «сплющити» ракетний блок. Паливні баки набули незвичайної форми. Хоча об'єм кожного бака становив приблизно 1,2 м3, їхні форми значно відрізнялись. Бак окислювача у формі тору розташували знизу. Це було дуже корисно для центрування, адже питома вага окислювача була майже вдвічі більшою, ніж у пального. В середній порожнині розташували двигун, а зовнішня поверхня через опорний шпангоут спиралась на нижній пояс силового перехідника. До верхнього поясу перехідника кріпився бак пального, що складався зі сферичного сегмента і конічної оболонки, до якої кріпився двигун. У блоці застосовувалися відомі в ракетній техніці компоненти палива: Азотний тетраоксид та Несиметричний диметилгідразин. Ця пара мала перевагу порівняно з іншими — компоненти при з'єднанні самозаймались.
Робота над доескізним проектом ракетного блоку просувалась важко — «ракетники» прагнули зробити блок якомога легшим, а «корабельники» намагались полегшити весь апарат. Відхід від сферичних поверхонь для герметичних відсіків, якими були паливні баки, створював додаткові товщини і відповідно додаткові маси. Однак зменшення висоти блоку знижувало центр мас усього корабля, що впливало на загальні масові витрати. «Корабельники» очолили розробку ракетного блоку і стали його блок так, щоб він був органічною частиною корабля, щоб його силова схема була загальною силовою схемою усього корабля, а його нижні обводи не спричинили зайвих збурень при зльоті тощо.
Вимоги щодо надійності двигуна встановлюють найвищі, але досягти надійності, рівної одиниці, досі не вдалося нікому. Для Місячного корабля, що мав здійснити посадку при роботі двигуна, навіть мінімальний ризик вважався неприпустимим. Тому на блок встановили другий резервний двигун (РД-859), виконаний за спрощеною схемою.
Основний двигун догальмовував при посадці, горизонтальному маневруванні і злеті. Режими його роботи були найрізноманітніші. На ділянці гальмування і злету тяга була близькою до оптимальної і дорівнювала приблизно 2000 кгс (близько 20 кН), а на ділянці горизонтального маневрування, де потрібно було зрівноважити масу корабля, вона становила приблизно 850 кгс (8500 Н). Щоб маневрувати по висоті, тобто підняти або опустити апарат, діапазон регулювання тяги на цій ділянці був досить широкий. Тяга двигуна могла знижуватися до 540 кгс і збільшуватися приблизно до 1000 кгс. Основний двигун мав бути дворежимним. Ці режими назвали:
- ОР — основний режим,
- РГД — режим глибокого дроселювання.
Резервний двигун мав використовуватись для порятунку, тому він мав один режим тяги, рівний тязі основного двигуна на злеті. У випадку збоїв при роботі основного двигуна вмикався резервний, і корабель злітав за аварійною траєкторією.
За статистикою відмови в роботі двигуна найбільш вірогідні при запуску і при перехідних режимах роботи. Якби при відриві від поверхні вийшов з ладу двигун, корабель розбився б. Часу на перезапуск двигуна або вмикання резервного не вистачило би. Вирішили на Місяці запускати обидва двигуни і за результатами діагностики залишати увімкнутим надійніший двигун, причому перевагу за рівних умов надавати основному. Основний двигун розташовувався на поздовжній осі корабля, тому резервний двигун зробили двокамерним. У ті часи двигуни космічних апаратів за так званою замкнутою схемою виготовляли дуже рідко, тому при розробці не стали ризикувати, а застосували добре вивчену і простішу схему двигунів — «відкриту», при якій частина компонентів витрачалася на роботу турбонасосного агрегату, а потім їхні продукти викидалися через вихлопні сопла назовні, що частково знижувало енергетику двигуна. Щоб не отримувати непотрібні збурення, ці сопла встановили на зрізі основних камер згоряння симетрично до осі — утворився окремий рушійний агрегат.
Кожен двигун мав запускатися щонайменше двічі. Компоненти палива самозаймались, однак для «гарматного» запуску слід було примусово розкрутити турбонасосний агрегат. Це мали зробити спеціальні порохові акумулятори тиску. При «гарматному запуску» двигун виходить на режим за частки секунди, що було надзвичайно важливо для Місячного корабля.
Системи корабля
У місячній кабіні перебував один космонавт. У центрі (відносно космонавта, який сидить у кабіні) був великий ілюмінатор для спостереження під час посадки. Вище нього був ілюмінатор для спостереження за стикуванням з місячним орбітальним кораблем. Найважливіші засоби управління апаратом знаходились праворуч, а менш важливі — ліворуч від космонавта.
МК мав бути пристосованим до безпілотного польоту: автоматично сідати на Місяць і автоматично стикуватись з орбітальним кораблем. Це було потрібно для випробувань апарату у безпілотному режимі і для здійснення можливих «рятувальних» операцій, якщо при пошкодженні блоку Е МК не міг злетіти з Місяця і космонавт залишався на поверхні. Це вимагало одночасного запуску до Місяця двох апаратів: робочого (пілотованого) і резервного. Автономність місячного корабля забезпечувалась телевізійними камерами, що дозволяло з Землі бачити все, що відбувається і дистанційно керувати космічним кораблем.
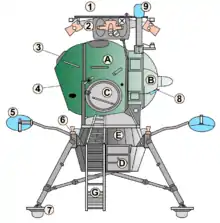
У задній частині місячної кабіни розміщувався дископодібний модуль з таким обладнанням:
- Система управління
- Радіотехнічні модулі
- Система управління електроживленням
- Система терморегуляції
- Апаратура для забезпечення стикування.
Спочатку у місячній кабіні передбачалося використовувати чистий кисень під тиском 0,4 атмосфери (парціальний тиск кисню). В американських космічних кораблях використовувалась киснева атмосфера, але це була занадто вогненебезпечне середовище, тому згодом частку кисню зменшили, додавши азоту і підвищивши тиск до 0,74 атмосфери. Маса запасів повітря збільшилась удвічі, але корабель ставав пожежобезпечнішим.
Посадкою місячної кабіни на останньому етапі управляв космонавт. На момент розробки посадкового апарата створення подібної системи гальмувала повна відсутність досвіду. Крім збереження центру мас слід було забезпечити повну працездатність навіть у випадку можливої розгерметизації кабіни. Хоча всі системи при розгерметизації мали залишитися цілими, скафандр був розрахований тільки на 10 годин, тобто в цьому випадку потрібно негайно повертатися на місячний орбітальний корабель. У зв'язку з цим довелося відмовитися від використання ножних педалей і використовувати для керування пальцеву ручку управління, яку можна би було використовувати при розгерметизації.
Довго пророблялися і варіанти розміщення приладових панелей та ілюмінаторів. З'ясували, що при посадці оптимальний кут огляду поверхні Місяця становить 7 градусів. Ілюмінатор для контролю за спуском мав координатну сітку для визначення і корекції місця торкання ґрунту. Доводилося створювати і скафандр, що дозволяв досить тривалий час працювати безпосередньо на Місяці. Він називався «Кречет» і став прообразом скафандрів «Орлан», які використовуються сьогодні російськими космонавтами для роботи у відкритому космосі. «Кречет», як і його сьогоднішній аналог «Орлан» був дуже складним пристроєм. Він не одягався на людину, людина заходила у скафандр — для цього в задній частині цього спорядження був люк. У кабіні була система спеціальних розтяжок і фіксаторів, необхідних для забезпечення непорушності людини під час маневрів, оскільки при маленькій масі місячного корабля зсув центру маси всього апарата через незграбний рух людини міг спричинити вельми великі неприємності.
Для випробування скафандра, і не тільки, збудували повномасштабний макет місячного корабля, на якому проводилися різні випробування і тренування екіпажу. Щоб імітувати місячну гравітацію, яка вшестеро менша від земної, збудували спеціальну похилу вежу. Людина ходила по її зовнішній стіні під кутом приблизно 30 градусів до вертикалі. При цьому земне тяжіння «тягнуло» донизу й забирало більшу частину маси (щоб не впасти, людина в «Кречет» перед цими операціями підвішувалася на тросі), а на упор ногами залишалася лише шоста частина маси, що й забезпечувало «місячні умови». Оскільки скафандр вийшов досить великим, довелося заново розробляти і люк. Розміщення приладів і агрегатів місячної кабіни також узгоджувалося з місцем розташування людини для збереження центру мас.
Для економії маси стикувальний вузол мав досить просту конструкцію порівняно з таким вузлом у «Союзів», що літають на навколоземній орбіті сьогодні. Це одночасно знижувало вартість апарата і підвищувало надійність. Оскільки космонавт переходив з місячного орбітального апарата в посадковий модуль і назад під час виходу у відкритий космос, не потребувалось жорсткого стикування для забезпечення герметичного перехідного тунелю між модулями. Розроблена для цього система «Контакт» забезпечувала просте зближення апаратів після старту місячного корабля з Місяця та їхнє механічне з'єднання.
Ця систему мали розробити і випробувати до 1968 року. Передбачалося запустити два «Союзи» у безпілотному режимі для відпрацювання стикування, після чого мав відбутись подібний політ двох пілотованих «Союзів». Спроби зістикуватись у безпілотному режимі закінчились невдало, а запуск одразу після цього корабля «Союз-1» з Володимиром Комаровим закінчився трагедією: він загинув при посадці на Землю. Замість чотирьох «Союзів» використали більше десяти апаратів, а радянська місячна програма затрималась (хоч і не тільки через це) на півтора року. «Контакт» був повністю готовий до роботи лише під час програми пілотованих орбітальних станцій «Салют», точніше — до жовтня 1971 року. Разом із системою орієнтації-стабілізації і паливом для неї місячна кабіна важила близько 1300 кг.
У місячному кораблі радянської програми Н1-Л3 були такі системи:
- Система автоматичного керування. Основи системи взяли з систем наведення у військових ракетних комплексах. Вона забезпечувала керування кораблем на усіх етапах польоту місячного модуля: зниження, посадки, зльоту і стикування. Усі необхідні для роботи обчислення забезпечувала бортова електронно-обчислювальна машина (БЦВМ), яка обробляла дані, отримані з вимірювальних датчиків, і віддавала команди рушійній установці. Основні дані про орієнтацію забезпечували гіроскопи і радар, який вимірював горизонтальну і вертикальну швидкості апарату. Космонавт міг коректувати команди бортового комп'ютера, а біля поверхні він бачив точку посадки апарата за допомогою особливих позначок на ілюмінаторі і міг змінити її — обрати нове місце посадки, розташоване не далі 100 метрів від старого місця. Усі обчислення відбувались трьома незалежними паралельними потоками для зменшення кількості можливих помилок.
- Радарна система для вимірювання швидкості апарату. Розташовувалась ззовні космічного корабля біля обладнання для виходу на місячну поверхню.
- Місячний посадковий пристрій.
- Стикувальна система «Контакт». Вона мала невелику масу і забезпечувала простий фізичний контакт і захоплення кораблів. «Контакт» міг працювати в ручному або автоматичному режимі.
- Система електророзподілу. Розташовувалась у нижньому відсіку приладів. Складалась з системи електричних кабелів і п'яти хімічних батарей: три в ЛПУ і дві у місячній кабіні. Ці електричні батареї мали відносно великий термін зберігання і могли застосовуватися за своїм прямим призначенням навіть після трьох місяців перебування у космічному просторі.
- Аналізатор інших бортових систем, що визначав їхню справність.
- Кабіна для космонавта.
- Бортовий комп'ютер. Використовувався у системі автоматичного керування. Швидкодія — 20 000 операцій за секунду. Забезпечував паралельне обчислення трьох незалежних потоків даних.
- Система розкриття антен.
- Самі антени: дві метрові параболічні антени для високошвидкісної передачі даних і трансляції телевізійного зображення і одна усебічна антена для зв'язку на низькій швидкості з Землею і місячним орбітальним кораблем.
- Телевізійні камери. Мали передавати кадри місячної поверхні при посадці безпілотного апарату та відеозображення космонавта, що виходить на місячну поверхню і працює на ній.
- Система передачі телеметричних даних про роботу всіх систем корабля.
- Скафандр «Кречет». Забезпечував вихід у відкритий космос і на поверхню. Автономність — 10 годин.
- Система підтримки атмосфери місячної кабіни.
- Система терморегуляції, яка забезпечувала нормальний температурний режим при температурі за межами місячного апарату від +130 °С до −200 °С.
- Наукове обладнання. Через обмеження маси МК його остаточно не обрали, головним «науковим експериментом» до 1969 року була установка радянського прапора на Місяці раніше, ніж американці встановлять свій.
- Система пожежогасіння.
Блок Є

Рушійна установка блоку Є, яка призначалася для м'якої посадки і зльоту з Місяця, розроблялась дуже ретельно. В перших начерках місячного корабля були присутні малюнки цього блоку. Спочатку планували обмежитися 510 кг, однак скоро зрозуміли, що це нереально.
Для надійності блок Є мав не один, а два двигуни: РД-858 і РД-859. Після відокремлення від апарату блоку Д вони запускалися одночасно. Якщо в роботі першого двигуна автоматика відзначала будь-які збої, то він одразу вимикався, і посадковий апарат повертався на другому, запасному двигуні до місячного орбітального корабля. Якщо все було нормально, то місячний модуль продовжував знижуватися на основному двигуні, другий залишався в резерві.
У режимі зниження було необхідно розвивати тягу 850 кг, а в режимі зльоту — 2000 кг. РД-858 міг змінювати свою потужність у цих межах, а РД-859 мав фіксовану потужність — 2000 кг і його неможливо було використати для посадки. Протягом усієї роботи блоку Є мало згоріти 2900 кг палива.
Створення двигуна багаторазового включення з регульованою тягою зажадало титанічних зусиль. Для його розробки довелось винаходити нові матеріали і технології. Ключовою проблемою в розробці блоку «Є» (як і місячного посадкового пристрою) стало «відбиття» газів, що витікали з сопла, від місячного ґрунту під час посадки. У американському «Аполлоні» для посадки і зльоту застосовувалися різні двигуни, що істотно спрощувало розробку. Подібний варіант у радянському проекті був неможливий внаслідок обмеження маси усього апарата. Якщо у американського місячного модуля двигун м'якої посадки при контакті з поверхнею засмічувався або пошкоджувався (що і сталось кілька разів), то це не мало ніякого значення. Для місячного корабля довелося розробляти систему, яка направляла реактивний струмінь газів в безпосередній близькості від поверхні якомога далі від ЛПУ. У момент вимкнення блоку «Є» (в режимі «посадка») сопла відразу ж закривалися для уникнення потрапляння до них сторонніх частинок, приміром, місячного пилу, який підіймався в момент торкання ґрунту.
Для збереження центру мас паливним бакам (об'ємом по 1.2 м³) довелося надати незвичайну форму: окислювач витрачався удвічі швидше, ніж паливо. Як паливо / окисник використовувались самозаймисті компоненти, що довго зберігаються: азотний тетраоксид і несиметричний диметилгідразин. Маса повністю заправленого блоку «Є» становила 2950 кг, порожній ступінь важив близько 550 кг. Для здійснення м'якої посадки необхідно було спалити близько 700 кг палива, а для зльоту було потрібно 2100 кг.
Система керування
Система управління Місячного корабля забезпечувала: посадку і «примісячнення», зліт і стикування на орбіті Місяця з місячним орбітальним кораблем тощо.

Розробку системи управління МК здійснював науково-дослідний інститут, керований академіком М. А. Пилюгіним. Цей колектив мав значний досвід розробки систем управління ракет, мав достатній заділ нових ідей по системах управління космічних об'єктів, які і втілив у систему управління ЛК. Інститут був провідним у створенні системи, а десятки організацій розробляли окремі елементи і блоки цієї складної системи.
Система автономного управління МК забезпечувала автоматичне керування його рухом з можливістю ручного введення установок для корекції траєкторії на всіх ділянках польоту МК і керування горизонтальним маневром МК на заключній ділянці посадки на поверхню Місяця.
Вперше в радянській космонавтиці система управління космічного об'єкта будувалася на базі бортової цифрової обчислювальної машини (БЦВМ), у якій інформація з усіх чутливих датчиків оброблялася за визначеною логікою, оцінювалась працездатність усіх систем і агрегатів МК і видавались необхідні команди для їхнього подальшого функціонування і польоту.
Чутливими датчиками системи управління були гіроскопічні прилади (об'єднані у триосьову гіростабілізовану платформу) для просторової орієнтації, посадковий радіолокатор для вимірювання швидкості і висоти польоту МК, коліматорний прицільний пристрій і радіотехнічні засоби вимірювання. Для забезпечення високої надійності БЦВМ мала три незалежні, паралельно працюючі канали.
У складі системи управління були напівавтоматична система управління (НСУ) горизонтальним маневром і кутовою швидкістю МК в процесі стикування і ручна система управління (РСУ). РСУ дозволяла пілоту самостійно обирати місце посадки на Місяці. Для цього він мав коліматорний прицільний пристрій і двоканатну ручку управління орієнтацією і пропорційною зміною горизонтальної швидкості МК.
Пілот, поєднуючи з коліматорним пристроєм мітки прогнозував і обирав точку посадки, вводив інформацію в систему управління для видачі команди на необхідний маневр. Перевірка точності орієнтації осей гіростабілізованої платформи здійснювалася сонячним і планетним датчиками.
Відпрацювання цього складного електронного комплексу здійснювалось на створених спеціальних стендах, вертольотному імітаторі посадки МК (на базі вертольота Мі-4) й інших пристроях.
Система орієнтації
Для коригувальних маневрів була окрема рушійна система. Як і в блоці Є, в ній використовувалися азотний тетраоксид і несиметричний диметилгідразин. Вона розміщувалася над місячною кабіною і могла забезпечувати горизонтальні і вертикальні корекції. Для підвищеної надійності місячний корабель мав дві незалежні системи орієнтації і міг працювати навіть якщо одна з них повністю виходила з ладу. Для їхньої роботи було 100 кг компонентів ракетного палива. Як і у випадку з основними паливними баками для збереження центру маси бак з окислювачем розміщувався всередині бака з паливом і мав особливу структуру.
Для подачі палива у паливні баки накачувався газ гелій під тиском 10 атмосфер, який витісняв рідину з бака. Двигун можна було включати багаторазово, тривалість мінімального імпульсу становила 9 мілісекунд, максимального — 10 секунд. Для сопел, розміщених під кутом 20 градусів до горизонталі, використали новий графіто-ніобієвий сплав.
На вершині усього корабля, крім системи орієнтації, знаходилися радіатори системи терморегулювання і захоплення стикувального вузла.
Модуль Т2К
Модуль Т2К мав доставити радянського космонавта на місячну поверхню а також повернути його на місячну орбіту, де він мав зістикуватися з кораблем 7К.
Вмиканням розгінного блоку до Місяця виводився 21-тонний апарат, який досягав орбіти Місяця через 3,5 доби. Протягом цього часу короткочасні вмикання блоку Д коректували траєкторію. Блок Д потім вмикався біля Місяця, переводячи весь комплекс Н1-Л3 на навколомісячну орбіту висотою 110 км. Другим його вмиканням біля Місяця периселеній (точка мінімального віддалення від поверхні Місяця) знижувався до 14 км. Цей блок міг запускатися для можливих виправлень орбіти ще кілька разів протягом 4 діб.
Схема посадки
Після необхідних маневрів на орбіті Місяця пілот місячного корабля виходив у відкритий космос, перевіряв справність усіх зовнішніх систем і переходив у посадковий апарат, оскільки прямого переходу через внутрішній люк з орбітального модуля в цей відсік не було. Блок Д, з'єднаний з посадковим ступенем, від'єднувався від місячного орбітального корабля. Блок Д використовувався востаннє: він зменшував вертикальну швидкість до 100 м/с, висота над поверхнею становила 4 км, після чого він відокремлювався і падав на Місяць. На висоті 3 км включався радар-висотомір, який управляв двигуном м'якої посадки блоку Є, який вмикався на цій же висоті і забезпечував плавне торкання поверхні.
Запас палива дозволяв модулю «зависнути» над Місяцем на 50 секунд і пілот мав остаточно вирішити: сідати чи ні. Вибір залежав від рельєфу в місці передбачуваної посадки. Якщо він був невідповідним (наприклад, великі камені), космонавт міг повернутися до орбітального апарату і далі на Землю, або обрати нову точку, розташовану не далі кількох сотень метрів від початково обраного місця. Після посадки космонавт виходив на поверхню, встановлював на ній прапор Радянського Союзу, відбирав зразки ґрунту і повертався в місячний корабель. Після відносно короткого перебування на Місяці (від 6 до 24 годин), частина МК (МПУ — місячний посадковий пристрій) залишалась на поверхні, а місячна кабіна після вмикання блоку Є стартувала з Місяця і зістиковувалась з місячним орбітальним кораблем. Космонавт виходив у відкритий космос зі зразками місячного ґрунту і переходив у орбітальний апарат. Місячна кабіна відстиковувалась.
Льотно-конструкторські випробування
Американські розробники корабля «Аполлон» передбачали одним із запусків ракети-носія «Сатурн» відпрацювати місячний модуль. Ці випробування вони успішно здійснили 22 січня 1968 і 18 травня 1969 року.
Здійснити аналогічне відпрацювання радянського Місячного корабля не було можливості, бо витрачати носій Н-1 вважалося марнотратством, а існуючі ракети-носії «Протон» і «Союз» не забезпечували одночасного виведення МК і Місячного орбітального корабля зі спусковим апаратом, який доставляв екіпаж на Землю після виконання програми. Тому в програмі льотного відпрацювання кораблів з'явились два нові кораблі Т1К і Т2К. Перший призначався для відпрацювання Місячного орбітального корабля з виведенням ракетою-носієм «Протон», а другий — для відпрацювання МК з виведенням ракетою-носієм «Союз».

Після розробки проекту місячного корабля слід було почати випробування його окремих компонентів, після чого можна було створювати працюючу версію місячного корабля. Виготовили стенди, які дозволяли тестувати окремі компоненти в умовах вакууму, сильної вібрації тощо. Деякі частини мали випробувати в космосі.
Створили такі макети МК та випробувальні стенди:
- Повномасштабний макет для відпрацювання виходу на поверхню Місяця і у відкритий космос.
- Електричний стенд. На ньому відпрацьовували електроніку космічного корабля і керуючу логіку, яка мала управляти кораблем біля Місяця.
- Електричний макет. На ньому відпрацьовували розміщення електроніки в МК.
- Випробувальний стенд блоку Є для відпрацювання його роботи в різних умовах.
- Макет для випробувань антени.
- Три макети блоку Є.
- Імітатори посадки, для навчання космонавтів.
Серед різних стендів був і спеціально переобладнаний вертоліт Мі-4 тощо.
Льотні випробування МК
Для відпрацювання маневрів, які мали здійснюватись на навколомісячній орбіті, розробили версії комплексу ЛОК-МК (місячний орбітальний корабель — місячний корабель): Т1К і Т2К. Перший запускався РН «Союз», другий — РН «Протон». Під час їхніх запусків відпрацювали понад 20 різних систем (наприклад, сонячні і зоряні датчики систем орієнтації), які передбачалося використовувати у місячній програмі.
Під час польотів апаратів Т1К мали відпрацьовуватись рушійні установки. Керівництво для економії коштів і часу переглянуло програму відпрацювання і почало скорочувати експериментальні вироби. Засумнівалися і в потребі існування кораблів Т1К і Т2К. Т1К ліквідували, а Т2К — Місячний корабель — залишили.
Апаратів Т2К виготовили 3 для таких завдань: в першому польоті випробовувалась рушійна установка, у другому польоті моделювались різні аварійні ситуації, а третій запуск запланували для дублювання деяких випробувань, які могли залишитися не проведеними протягом перших двох польотів.
Апарати Т2К виготовлялись з затримками, під час передстартових випробувань на Байконурі в першому кораблі виявили 10 мікроскопічних отворів, які призвели б до розгерметизації апарату, але ці несправності були незначними і їх вдалося усунути швидко. Перший Т2К стартував у листопаді 1970 року. Попередньо програма цих випробувальних польотів ретельно розроблялася, після кожного маневру отримана телеметрія уважно вивчалася, що дозволило успішно здійснити польоти апаратів за цією програмою.
Хроніка запусків
- 24 листопада 1970 року — Т2К (серійний номер 1). Космос-379. Апарат спочатку запустили на орбіту висотою 233 х 192 км, після чого збільшенням швидкості на 263 м/с перевели на орбіту з параметрами 196 км х 1206 км. Цей маневр моделював роботу блоку Д, який переводив місячний корабель з орбіти 188 км х 1198 км на орбіту 177 км х 14 км.
- 26 лютого 1971 року — Т2К (серійний номер 2). Космос-398. Другий випробувальний політ за місячною програмою. Апарат вивели на орбіту висотою 189 км х 252 км, після чого кількома маневрами перевели на орбіту з параметрами 200 км х 10905 км.
- 12 серпня 1971 року — Т2К (серійний номер 3). Космос-434. Останній політ апарату серії Т2К. Апарат вивели на орбіту висотою 188 км х 267 км, після чого кількома маневрами перевели на орбіту з параметрами 180 км х 11 384 км.
Смерть місячного корабля
Після вдалої реалізації власної місячної програми у США, радянська Місячна програма Н1-Л3 поступово втрачала свою актуальність і значимість. Цей проект не зміг забезпечити лідерство Радянського Союзу в космосі, хоча були й інші причини. Передбачалося для програми «Заря» розробити модифікацію місячного корабля, який міг би доставити на Місяць двох осіб. Однак виявилося, що при масі МК 5500 кг це було неможливо зробити. Для здійснення подібної ідеї необхідно створювати місячний апарат повністю заново.
Зі смертю Корольова та Янгеля СРСР втратив видатних конструкторів, здатних завершити програму до кінця. Вона закінчилась так само тихо, як і починалась: громадськість дізналась про існування місячних програм у СРСР лише наприкінці 1980-х років. Незважаючи на наявність багатьох інших подібних програм, тільки Н1-Л3 дійшов до фази реалізації, однак дійшов до кінця. Від програми залишились макети місячного корабля у музеях МАІ (Москва і Санкт-Петербург), в РКК «Енергія» (м. Корольов) і в КБ "Південне" (м. Дніпропетровськ).
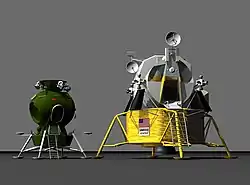
Місячний корабель порівняно з Місячним модулем
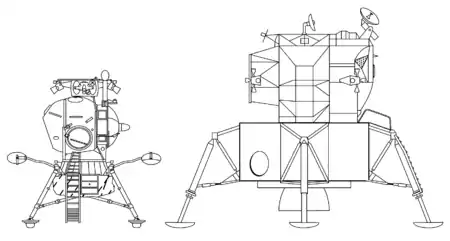
Оскільки потужність корисного навантаження ракети Н1 становила 70 % американської Сатурн V, то Місячний корабель значно відрізнявся від Місячного модуля (Місячний модуль) з програми Аполлон:
- Місячний корабель мав інший профіль посадки;
- Місячний корабель важив утричі менше ніж Місячний модуль;
- Екіпаж складався з одного космонавта; Місячний модуль доставляв на місячну поверхню двох;
- Не мав перехідного тунелю, як Місячний модуль й космонавт мав вийти у відкритий космос з ЛОК (Союз 7К-Л3) командного корабля, перейти в Місячний корабель і потім назад;
- Щоб залишити місячну орбіту і почати спуск, Місячний корабель використовував гальмівний двигун Блоку Д, який до того виводив МОК-ЛК на орбіту Місяця; Місячний модуль використовував власний гальмівний двигун (згодом Аполлон використовував основний двигун, щоб допомогти гальмуванню Місячного модуля)
- Остаточне уповільнення до швидкості 100 м/с на висоті 4 км над місячною поверхнею, здійснювалося двигуном Блоку Є, який згодом використовувався для зльоту ступеня й повернення Місячного корабля на навколомісячну орбіту;
- Для посадки в Місячний модуль мав окремий двигун;
- Місячний корабель для зльоту і посадки використовував один двигун, а опори, які використовувались при посадці, залишались на Місяці. Місячний модуль для зльоту використовував окремий двигун.
Джерела
- Філін В. М. Спогади про Місячний корабель. Невідома сторінка історії радянської космонавтики. (рос.)
