Остійність
Ості́йність — здатність плавучого засобу протистояти зовнішнім силам, що порушують його рівновагу, і повертатися у вихідне положення рівноваги, коли дія цих сил припиняється. Є однією з основних морехідних якостей плавучого засобу[1][2], а також однойменним розділом теорії корабля.
.jpg.webp)
Рівноважним вважається стан з допустимими величинами кутів нахилу (крену) і диференту (в окремому випадку, близькими до нуля). При відхиленні від нього плавзасіб прагне повернутися до рівноваги. Тобто остійність проявляється тільки тоді, коли має місце виведення з рівноваги зовнішнім впливом (удар хвилі, порив вітру, зміна курсу тощо). Запасом остійності називається ступінь захищеності плавучого засобу від перекидання. Протилежну здатність — схильність до крену і повільного повертання в положення рівноваги (брак остійності) називають валкістю[3], а судна з недостатньою остійністю — валкими.
Стосовно до суден використовується уточнена характеристика, що має назву «остійність судна».
Види остійності
Розрізняють остійність:
- поперечну (при нахилі судна у поперечній площині) і поздовжню;
- динамічну (коли судно нахиляється із значною кутовою швидкістю) та статичну (при повільному нахилі судна).
Достатній рівень поперечної остійності, яка значно менша від поздовжньої (через подовженість форми корпусу судна) є важливою умовою безпеки плавання судна.
Початкова поперечна остійність
При крені остійність розглядається як початкова при кутах до 10…12 °. У цих межах відновлювальне зусилля є пропорційним до кута крену і може бути визначене за допомогою простих лінійних залежностей.
При цьому робиться припущення, що відхилення від положення рівноваги викликаються зовнішніми силами, які не змінюють ні ваги судна, ні положення його центра ваги у системі координат, прив'язаній до самого судна.. Інакше кажучи, допускають що немає зсуву вантажу, тобто занурений об'єм не змінюється за величиною, але змінюється за формою. Рівнооб'ємним нахилам відповідають рівнооб'ємні ватерлінії, що відтинають однакові за величиною занурені об'єми корпусу. Лінія перетину площин ватерлінії називається віссю нахилення, яка при рівнооб'ємних нахилах проходить через центр ваги площі ватерлінії. При поперечних нахилах вона лежить в діаметральній площині.
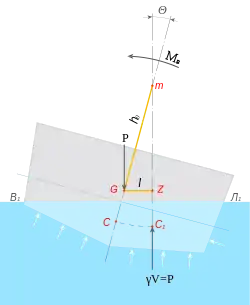
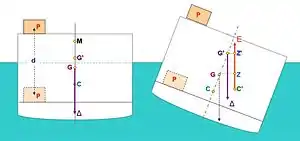
Центр ваги G при такому нахилі не змінює свого положення, а центр величини С як центр ваги зануреного об'єму переміщується вздовж деякої кривої СС1 в бік нахилу і займає нове положення C1. Переміщення центру величини стається через зміну форми зануреного об'єму: з лівого борту він зменшився, а з правого — збільшився. Сила плавучості γV, що прикладена в центрі величини, спрямована по нормалі до траєкторії його переміщення.
Метацентр
При малих нахилах у поперечній площині лінії дії сил плавучості перетинають вертикальну площину симетрії, що проходить через центр ваги у точці m, що носить назву метацентр (у цьому випадку — поперечний метацентр). Поперечний метацентр можна ще визначити як центр кривини кривої, уздовж якої переміщається центр величини при нахилах в поперечній площині. У загальному випадку нахилення (на великий кут і в будь-якій площині) центр величини описує деяку складну криву, і метацентр займає різні положення. При малих кутах нахилу в поперечній площині можна вважати, що центр величини переміщається по дузі кола, а поперечний метацентр займає постійне місце в діаметральній площині.
Радіус кривини траєкторії, по якій переміщується центр величини при поперечних нахилах називається поперечним метацентричним радіусом r. Тобто — це відстань r = mC між поперечним метацентром і центром величини.
Характеристики остійності
В результаті зміщення центру величини при нахиленні судна сила ваги і сила плавучості утворюють пару сил. Якщо центр ваги розташований нижче за метацентр то момент mв, що виникає, діє в бік відновлення рівноваги судна. Тоді кажуть, що судно є остійним. В іншому випадку момент може бути нульовим або таким, що сприяє перекиданню — тоді судно стає неостійним.
Перевищення поперечного метацентра (zm) над основною площиною, місце розташування центра величини (zc), а також величина поперечного метацентричного радіуса r у значній мірі визначають остійність судна та залежать від величини його водотоннажності, форми корпуса і посадки. Залежність величини поперечного метацентричного радіуса від форми корпуса (величини площі ватерлінії та її форми) і об'ємної водотоннажності має такий вигляд:
- , (1)

де Ix — момент інерції площі дійсної ватерлінії відносно поздовжньої осі, що проходить через центр її ваги, м4; V — об'ємна водотоннажність (занурений об'єм), м³.
З розгляду трьох можливих варіантів дії сил Р і γV на судно при нахилах можна зробити висновок, що для забезпечення остійності положення рівноваги судна необхідно, щоб метацентр знаходився вище за центр ваги. Тому перевищення поперечного метацентра над центром ваги виділяється в особливу величину і носить назву поперечної метацентричної висоти h. Величина h може бути виражена як:
- , (2)

де zm і zg висоти метацентра і центра ваги над основною площиною, відповідно.
Величина відновного моменту залежить від ваги судна і плеча поперечної остійності. З трикутника GmZ плече остійності може бути виражене через поперечну метацентричну висоту GZ = mG sinθ = h sinθ. Тоді відновний момент буде визначатись формулою:
- , (3)

котра носить назву метацентричної формули поперечної остійності. При малих кутах крену, коли можна вважати, що sin θ = θ в радіанах, відновний момент визначається за лінійною метацентричною формулою: mθ = Ph θ.
Таким чином, величина відновного моменту, що визначає опірність судна відхиленням, визначається, в свою чергу, величиною поперечної метацентричної висоти.
Остійність форми і остійність ваги
Підставляючи в метацентричну формулу поперечної остійності h = r − а, та замінюючи r його значенням за формулою (1), а також Р = γV отримуємо:
- mθ = P(r − a) sinθ = Pr sinθ − Pa sinθ
і остаточно
- , (4)

Перший член у виразі (4) в основному визначається величиною і формою площі ватерлінії і тому називається моментом остійності форми: mф = γ Ix sin θ. Момент остійності форми завжди є додатною величиною і намагається повернути нахилене судно у вихідне положення.
Другий член у формулі (4) залежить від ваги P і перевищення центру ваги над центром величини a і називається моментом остійності ваги mв = − Pa sin θ. Момент остійності ваги для випадку високого розташування центру ваги (zg > zс) є величиною від'ємною, і діє в напрямку збільшення нахилу.
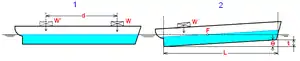
Фізична сутність моменту остійності форми і моменту остійності ваги розкривається за допомогою схеми, на якій показана система сил, що діють на нахилене судно. З нахиленого борту у воду входить додатковий об'єм v1, що утворює додаткову «виштовхувальну» силу плавучості. З протилежного боку з води виходить об'єм v2, що намагається занурити цей борт. Обидві сили працюють на випрямлення.
Занурений об'єм V1, що відповідає посадці по ватерлінію B1Л1, може бути поданий у вигляді алгебраїчної суми трьох об'ємів
- Vl = V + v1 − v2,
де: V — занурений об'єм при початковій посадці по ватерлінію;
v1 — клиноподібний занурений об'єм, а v2 — клиноподібний об'єм, що виринув з води.
Відповідно до цього і силу плавучості γV1 можна замінити трьома складовими силами γV, γv1, γv2, прикладеними в центрах величини об'ємів V, v1, v2. Ці три сили разом із силою тяжіння Р утворюють дві пари Р − γV і γv1 − γv2, що еквівалентні парі Р − γV1. Відновний момент дорівнює сумі моментів цих двох пар
- mθ = m (γv1, γv2) + m (γV, P).
Момент сил плавучості клинових об'ємів v1 та v2 є моментом остійності форми. Чим ширшим є корпус в районі ватерлінії, тим більшими є клинові об'єми та їхні плечі при нахилах у поперечній площині, тим більшим є момент остійності форми. Величина моменту остійності форми визначається в основному моментом інерції площі, охопленої ватерлінією відносно поздовжньої осі Ix. А момент інерції Ix є пропорційним квадрату ширини площі ватерлінії.
Момент пари сил Р та γV є моментом остійності ваги. Він обумовлений розбіжністю точок прикладання сил тяжіння і плавучості (G та С) у вихідному положенні рівноваги, внаслідок чого при нахилах лінії дії цих сил розходяться, і сили Р і γV утворюють пару.
Початкова поздовжня остійність
Поздовжня остійність визначається тими ж залежностями, що і поперечна.
Під дією зовнішнього диферентного моменту Mдиф судно, що плаває у положенні рівноваги на рівний кіль (ватерлінія ВЛ), нахиляється у поздовжній площині на кут Ψ, (ватерлінія B1Л1). Переміщення центра величини внаслідок зміни форми зануреного об'єму забезпечує появу поздовжнього відновного моменту
- Mψ = P•GK,
де GK — плече поздовжньої остійності. Точка М є поздовжнім метацентром, перевищення поздовжнього метацентра над центром ваги — поздовжньою метацентричною висотою Н, а відстань між поздовжнім метацентром і центром величини — поздовжнім метацентричним радіусом R.
Поздовжній відновний момент при малих кутах диференту визначається за формулами: Mψ = PH•sin ψ, Mψ = РН•ψ, що носять назву метацентричних формул поздовжньої остійності. Ці залежності для поздовжнього відновного моменту є справедливими при кутах диференту до 0,5…1,0°, тому поздовжня остійність розглядається як початкова лише в цих межах.
Поздовжній метацентричний радіус визначається за формулою:
- , (5)

де: Iyf — момент інерції площі дійсної ватерлінії відносно поперечної осі, що проходить через її центр ваги F, м4, а метацентрична формула поздовжньої остійності у розгорненому вигляді отримується аналогічно, як формула (4),
- Мψ = γ Iyf•sin ψ − Pa sin•ψ , (6)
Таким чином, поздовжній момент остійності форми Мψ = γ Iyf• sin ψ, а момент остійності ваги Мв = − Pa• sin ψ.
Порівнюючи моменти остійності форми і ваги при поперечних і поздовжніх нахилах за формулами (4) і (6), бачимо, що остійність ваги в обох випадках однакова (за умови θ = ψ), але остійність форми сильно різниться. Поздовжній момент остійності форми значно більший за поперечний, оскільки Iyf приблизно на два порядки більший від Ix.
Якщо величина поперечної метацентричної висоти складає десяті частки метра, то поздовжня метацентрична висота лежить в межах H = (0,8…1,5) L, де L — довжина судна по ватерлінії, м.
Частка моментів остійності форми і ваги в забезпеченні поперечної і поздовжньої остійності неоднакова. При поперечних нахилах, момент остійності ваги складає значну частку від моменту остійності форми. Тому поперечний момент відновлення становить ≈ 30 % від моменту остійності форми. При поздовжніх нахилах момент остійності ваги складає усього лише 0,5…1,0 % від моменту остійності форми, тобто поздовжній момент відновлення практично дорівнює моменту остійності форми.
Коефіцієнт поздовжньої остійності Кψ визначається за формулою:

При нахиленнях в будь-яких інших площинах, відмінних від поперечної та поздовжньої, величини метацентричних радіусів і метацентричних висот (а, отже, і остійність) набувають проміжних значень між максимальним і мінімальним, що відповідають поздовжнім і поперечним нахилам.
Діаграма остійності
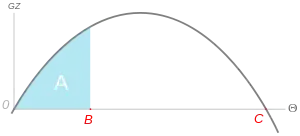
Θ — кут нахилу; GZ — плече статичного відновного моменту; B — поточний кут; A — робота відновного моменту; C — кут закочування
Діаграмою остійності називається залежність відновлюючого зусилля від кута нахилу. Інколи називається діаграмою Ріда, на честь інженера, який увів її у вжиток. Для поперечної остійності (для неї спочатку і було побудовано Рідом діаграму) координатами будуть кут крену Θ у плече відновного моменту GZ. Можна замінити плече на сам момент M, від цього вигляд діаграми не зміниться.
Зазвичай на діаграмі зображується крен на один борт (правий), при якому кути і моменти вважаються додатніми. Якщо продовжити її на інший борт, крен і відновний (спрямляющий) момент змінять знак. Тобто діаграма симетрична відносно початкової точки.
Основні елементи діаграми остійності
Початкова точка O, вона ж зазвичай точка рівноваги. У момент, коли крен Θ = 0, спрямляючий момент відсутній GZ = 0. Якщо у силу якихось причин початкова остійність негативна, точка рівноваги може не збігатися з початком координат. Тоді GZ = 0 при Θ = Θ1.
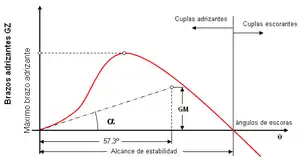
Точка максимуму — це значення кута, при якому спрямляючий момент досягає максимуму GZmax. До цього кута подальший нахил викликає зростання моменту. Після досягнення максимуму нахил супровджується зменшенням моменту, до досягнення третьої характерної точки:
Точка закочення C — відповідає куту, при якому спрямляючий момент спадає до нуля GZ = 0. Відповідає умові перекидання судна, оскільки спрямляючі сили відсутні. Для звичайних водотоннажних суден кут закочування (статичний) знаходиться в межах 65…75°. Для кілевих яхт — в області 120…125°.
Кривина — характеризує інтенсивність наростання спрямляючого моменту. Дотична до кривої остійності у точці O характеризує початкову метацентричну висоту. Ордината дотичної для кута Θ = 1 рад дорівнює метацентричній висоті h (GM).
Площа під кривою для поточного кута B характеризує роботу A відновного моменту і є мірою динамічної остійності.
Види діаграм остійності
- Нормальна. Характерна для більшості водотоннажних суден з нормальною метацентричною висотою, наприклад, для суховантажних суден.
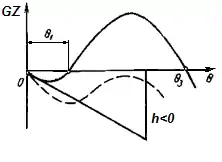
- S-подібна (з перегином). Характерна для суден із зменшеною метацентричною висотою, наприклад, для високобортних пасажирських суден.
- З від'ємною початковою остійністю. Не є характерною для більшості суден. Виникає у випадку, коли початкова остійність негативна. Судно при цьому плаває в рівновазі не на рівний кіль, а з креном Θ1, що відповідає точці перетину кривої і осі Θ. Наприклад, така діаграма буває у лісовозів, що йдуть у перегруз або суден, які мають вільні поверхні в танках. Правилами всіх найбільших світових класифікаційних товариств (наприклад, Регістр Ллойда, Регістр судноплавства України, Російський Морський Регістр Судноплавства тощо) заборонена експлуатація суден, які мають метацентричну висоту меншу за 0,2 м (і, в тому числі, суден з негативною початковою остійністю). Початкова остійність судна може стати негативною або внаслідок аварії, або внаслідок посадового порушення правил експлуатації з боку капітана судна.
Фактори, що впливають на зміну остійності
Переміщення вантажів

Переміщення вантажу р у довільному напрямі з точки g1 (x1, y1, z1) у точку g2 (x2, y2, z2) можна замінити трьома послідовними переміщеннями паралельними до осей координатної системи oxyz на відстані x2 − x1, y2 − y1, z2 − z1. Ці переміщення називаються відповідно горизонтально-проздовжнім, горизонтально-поперечним і вертикальним.
При вертикальному переміщенні вантажу відбувається переміщення сили р вздовж лінії її дії. Рівновага судна при цьому не порушується, посадка не змінюється, тобто величина і форма зануреного об'єму залишаються сталими. Тому центр величини, поперечний і поздовжній метацентри не змінюють свого розташування. Центр ваги переміщується вгору з точки G в точку G1 на відстань δZg, прямо пропорційну до ваги переміщеного вантажу р і величині переміщення z2 − z1 та обернено пропорційну до ваги судна:

Проздовжня і поперечна метацентричні висоти змінюються на одну і ту ж величину:
- δh = δH = − δZg.
Величина приросту поперечного і поздовжнього коефіцієнтів остійності також є однаковою:
- δКθ = P•δh и δКψ = P•δH, або
- δКθ = δКψ = − р (z2 − z1).
Метацентричні висоти і коефіцієнти остійності після переміщення вантажу набувають значень:
- h1 = h + δh;
- H1 = Н + δH;
- Кθ1 = Кθ + δКθ;
- Кψ1 = Кψ + δКψ ,
причому переміщення вниз відповідає позитивним приростам, а вгору — негативним. Тобто при переміщенні вантажу вгору остійність зменшується, а при переміщенні вниз — збільшується. Оскільки поперечні і поздовжні прирощення однакові, а метацентричні висоти різні, впливи вертикальних переміщень на поперечну і подовжню остійність сильно розрізняються. Для поздовжньої остійності δH становить лише малу частку від Н. Для поперечної можливі ситуації, коли h ≈ δh, тобто спостерігатиметься повна втрата (або відновлення) остійності.
При горизонтально-поперечному переміщенні вантажу з точки А в точку В судно крениться від прямого положення рівноваги (ватерлінія ВЛ) на кут θ (ватерлінія B1Л1). Таке переміщення вантажу можна подати так, як, нібито вантаж у точці В знято (сила р спрямована у протилежний бік — вгору), а у точці E прийнято.
Нахилу протидіє відновний момент mθ = Ph•sinθ. Судно перебуватиме у рівновазі тоді, коли нахиляючий і відновний моменти зрівняються:
- mкр = mθ, тобто
- Ph•sinθ = p ly cosθ,
де ly = BE. Звідси визначається кут крену рівноважного стану:

Переміщення вантажу викликає зсув центру ваги судна в бік переміщення вантажу на відстань GG1 = p ly / P. Центр величини при нахилення переміщується в бік нахилу до тих пір, доки не опиниться на одній вертикалі з центром ваги (друга умова рівноваги).
Поперечна метацентрична висота після перенесення вантажу визначається з трикутника GmG1:

При малих кутах нахилу cosθ ≈ 1; h1 ≈ h, тобто початкова поперечна остійність при горизонтально-поперечному переміщенні вантажу практично не змінюється.
Формули для визначення посадки і остійності у випадку горизонтально-поздовжнього переміщення вантажу виводяться аналогічно до попередніх. З рівняння залежності диферентуючого моменту від переміщення вантажу Мдиф = p (x1 − x2) cosψ і відновного моменту Мψ = PH sinψ визначається кут диференту, який отримає судно після переміщення вантажу:

Початкова поздовжня остійність від горизонтально-поздовжнього переміщення вантажу також практично не змінюється.
Прийняття і зняття вантажів
Прийняття або зняття вантажів змінює як навантаження судна (вагу і координати центра ваги), так і його занурений об'єм (його величину, форму, координати центра величини).
Прийняття вантажу у довільне місце можна подати як прийняття цього вантажу без зміни крену і диференту, а потім перенесення його у призначене місце. Умовою незмінності крену і диференту при прийнятті вантажу р є розташування його центру ваги на одній вертикалі з центром величини додатково зануреного у воду об'єму δV, що дорівнює p/γ, де γ — питома вага води. При прийнятті відносно малого вантажу можна вважати, що для уникнення крену і диференту він повинен бути поміщений на одну вертикаль з центром ваги F вихідної площини ватерлінії.
Вплив переміщень вантажу на остійність і посадку розглянуто вище. Для визначення метацентричних висот після прийняття вантажу потрібно знайти координати центра ваги zg1, і метацентрів zc1 + r1 та zc1 + R1. Нове розташування центра ваги знаходиться з умови рівності статичних моментів сил тяжіння відносно основної площини.
У загальному випадку прийому чи зняття декількох вантажів нове положення центру ваги визначається за формулою:
- zg1 = (Pzg ± ∑pizpi) /P1,
де: pi — вага прийнятого або знятого окремо вантажу, при цьому вантаж, що приймається береться зі знаком плюс, а, що знімається — зі знаком мінус; zpi — апліката центра ваги прийнятого чи знятого вантажу.
У випадку прийняття відносно невеликих вантажів (менше 10 % водотоннажності) на надводний корабель (судно) вважається, що форма і площа дійсної ватерлінії не змінюються, а занурений об'єм лінійно залежить від осадки — тобто приймається гіпотеза прямобортності. Тоді коефіцієнти остійності виражаються як:
- δKθ = р (Т + δТ/2 − zp + dIx/dV)
- δKψ = р (Т + δТ/2 − zp + dIyf/dV)
У складніших випадках використовується діаграма плавучості і початкової остійності, з якої знімають значення зануреного об'єму, метацентричного радіуса, координат центра ваги і центра величини в залежності від осадки. Її використання є характерним для визначення остійності апаратів занурення, наприклад підводних човнів.
Вільні поверхні
Усі розглянуті вище випадки припускають, що центр ваги судна є нерухомим, тобто немає вантажів, що переміщалися б при появі нахилу. Але коли такі вантажі є, їх вплив на остійність суттєво більший від решти видів вантажів.
Типовим випадком є рідкі вантажі (паливо, масло, баластова чи котельна вода) в цистернах, заповнених частково. Такі вантажі здатні переливатися при нахилах. Якщо рідкий вантаж заповнює цистерну повністю, він еквівалентний твердому закріпленому вантажу.
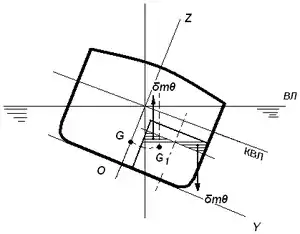
Якщо рідина заповнює цистерну не повністю, тобто має вільну поверхню, що займає завжди горизонтальне положення, то при нахилі судна на кут θ рідина переливається в бік нахилу. Вільна поверхня розміститься під таким же кутом відносно конструктивної ватерлінії.
Рівні рідкого вантажу відтинають однакові за величиною об'єми цистерн, тобто вони є подібним рівнооб'ємним ватерлініям. Тому момент, що називають переливанням рідкого вантажу при крені δmθ, можна виразити аналогічно до моменту остійності форми mф, тільки δmθ є протилежним до mф за знаком:
- δmθ = − γр ixθ,
де ix — момент інерції площі вільної поверхні рідкого вантажу відносно поздовжньої осі, що проходить через центр ваги цієї площі, γр — питома вага рідкого вантажу.
Тоді відновний момент при наявності рідкого вантажу з вільною поверхнею:
- mθ1 = mθ + δmθ = Phθ − γр ixθ = P(h − γр ix /γV)θ = Ph1 θ,
де h — поперечна метацентрична висота за відсутності переливання, h1 = h − γр ix /γV — фактична поперечна метацентрична висота.
Вплив вантажу, що переливається дає поправку на поперечну метацентричну висоту δ h = − γр ix /γV.
Густини води і рідкого вантажу відносно стабільні, тобто основний вплив на поправку надає форма вільної поверхні, точніше її момент інерції. А значить, на поперечну остійність в основному впливає ширина, а на поздовжню довжина вільної поверхні.
Фізичний зміст від'ємного значення поправки в тому, що наявність вільних поверхонь завжди зменшує остійність. Тому вживаються організаційні та конструктивні заходи для їх зменшення:
- Повна запресовка цистерн, щоб не допускати вільних поверхонь.
- Якщо це неможливо, робиться заповнення під горловину, або навпаки, тільки на дні. У цьому випадку будь-який нахил різко зменшує площу вільної поверхні.
- Контроль числа цистерн, що мають вільні поверхні.
- Розбивка цистерн внутрішніми непроникними перегородками, з метою зменшення моменту інерції вільної поверхні ix
Динамічна остійність
На відміну від статичного, динамічний вплив сил і моментів надає судну значних кутових швидкостей і прискорень. Тому їх вплив розглядається в енергетичному плані, точніше у вигляді роботи сил і моментів, а не у самих зусиллях. При цьому використовується теорема кінетичної енергії, згідно з якою приріст кінетичної енергії руху нахилення судна дорівнює роботі діючих на нього сил.
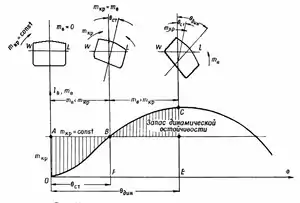
Коли до судна прикладається момент крену mкр, сталий за величиною, воно отримує додатне прискорення, з яким починає кренитися. По мірі нахилу зростає відновний момент, але спочатку, до кута θст, при якому mкр = mθ, він буде меншим за момент крену. По досягненні кута статичної рівноваги θст, кінетична енергія обертального руху буде максимальною. Тому судно не залишиться в положенні рівноваги, а за рахунок кінетичної енергії буде кренитися далі, але сповільнено, оскільки відновний момент є більшим від моменту, що викликає крен. Накопичена раніше кінетична енергія погашається надлишковою роботою відновного моменту. Як тільки величина цієї роботи буде достатньою для повного погашення кінетичної енергії, кутова швидкість стане рівною нулю і судно перестане кренитися.
Найбільший кут нахилу, який отримає судно від динамічного моменту, називається динамічним кутом крену θдин. На відміну від нього кут крену, з яким судно буде плавати під дією того ж моменту (за умовою mкр = mθ), називається статичним кутом крену θст.
Якщо скористатись діаграмою статичної остійності, робота може бути виражена площею під кривою відновного моменту mв. Відповідно, динамічний кут крену θдин можна визначити з рівності площ OAB і BCD, що відповідають надлишковій роботі відновного моменту. Аналітично ця ж робота обчислюється як:
- ,

на інтервалі від 0 до θдин.
Досягнувши динамічного кута крену θдин, судно не набуває рівноваги, а під дією надлишкового відновного моменту починає прискорено випрямлятися. При відсутності опору води судно увійшло б в незатухаючі коливання навколо положення рівноваги при крені θст з амплітудою від 0 до θдин. Але практично, через опір води коливання швидко згасають і судно залишається плавати зі статичним кутом крену θст
Динамічний вплив моменту, що викликає крен завжди є небезпечнішим за статичний, так як призводить до більших нахилів. У межах прямолінійної частини діаграми статичної остійності, динамічний кут крену приблизно у два рази більший від статичного: θдин θ ≈ 2 ст .
Див. також
Примітки
- «Остійність» в УРЕ.
- «Остійність» у Академічному тлумачному словнику української мови в 11 томах. Т. 5, С. 787.
- Валкость корабля // Толковый Военно-морской Словарь. — 2010. (рос.)
Джерела
- Справочник по теории корабля: В трёх томах. Том 2. Статика судов. Качка судов / под ред. Я. И. Войткунского. — Л.: Судостроение, 1985. — 440 с.
- Семёнов-Тян-Шанский В. В. Статика и динамика корабля. — Л.: Судостроение, 1973.
- Новиков А. И. Грузовая марка морских судов. — Севастополь: Кручинин Л. Ю., 2006. — 160 с. — ISBN 966-8389-17-4
- Донцов C. B. Основы теории судна: учебное пособие/ С. В. Донцов.- Одесса: Феникс, 2007. — 142 с.
- Сизов В. Г. Теория корабля: Учебник/ В. Г. Сизов. — Одесса: Феникс, М.:ТрансЛит. 2008. — 464 с.
- И. Ф. Хурс Практические расчеты мореходных качеств судна. Измаил: Измаильский Морской Тренажерный Центр, 2001. — 28 с.
- Світлий Ю. Г., Білецький В. С.. Гідравлічний транспорт (монографія). — Донецьк: Східний видавничий дім, Донецьке відділення НТШ, «Редакція гірничої енциклопедії», 2009. — 436 с. — ISBN 978-966-317-038-1
Посилання
- Регістр судноплавства України
- Перестюк І. Основи статики судна: плавучість та остійність у журналі «Шкіпер»
- Перестюк І. Основи статики судна: остійність — значні нахили у журналі «Шкіпер»
- Перестюк І. Основи статики судна: динамічна остійність у журналі «Шкіпер»