Рекурсивне баєсове оцінювання
Рекурси́вне ба́єсове оці́нювання, відоме також як фі́льтр Ба́єса, — це загальний ймовірнісний підхід до рекурсивного оцінювання невідомої функції густини ймовірності протягом часу з використанням вхідних вимірювань та математичної моделі процесу.
У робототехніці
Фільтр Баєса — це алгоритм, що застосовується в інформатиці для обчислення ймовірностей численних переконань, щоби давати можливість роботові робити висновок про власне положення та орієнтацію. По суті, фільтри Баєса дають можливість роботам постійно уточнювати їхнє найімовірніше положення відносно системи координат на підставі щойно отриманих даних давачів. Це є рекурсивний алгоритм. Він складається з двох частин: передбачення та нововведення. Якщо змінні є лінійними та мають нормальний розподіл, то фільтр Баєса стає рівним фільтрові Калмана.
Як простий приклад, робот, що рухається сіткою, може мати кілька різних давачів, що надають йому інформацію про його оточення. Робот може починати з упевненості, що він знаходиться у положенні (0,0). Однак, оскільки робот рухається все далі й далі від свого початкового положення, він має щоразу менше впевненості у своєму положенні; завдяки застосуванню фільтра Баєса переконанню робота про його власне положення може бути визначено ймовірність, і цю ймовірність можливо постійно уточнювати додатковою інформацією, отримуваною від давачів.
Модель
Справжній стан вважається неспостережуваним марковським процесом, а вимірювання є спостережуваними станами прихованої марковської моделі (ПММ). Наступна ілюстрація представляє баєсову мережу ПММ.


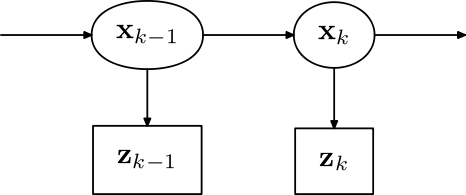
В силу марковського припущення ймовірність справжнього поточного стану при заданому безпосередньо попередньому є умовно незалежною від інших раніших станів.

Так само, вимірювання на k-тому такті залежить лише від поточного стану, тому воно є умовно незалежним від усіх інших станів при заданому поточному.

Виходячи з цих припущень, розподіл ймовірності над усіма станами ПММ може бути записано просто як:

Проте, при використанні фільтру Калмана для оцінювання стану x потрібний розподіл ймовірності пов'язано з поточним станом, обумовленим вимірюваннями до самого поточного такту. (Це досягається відособленням попередніх станів та діленням на ймовірність множини вимірювань.)
Це веде до ймовірнісного запису кроків передбачення та уточнення фільтру Калмана. Розподіл ймовірності, пов'язаний із передбачуваним станом, є сумою (інтегралом) добутків розподілу ймовірності, пов'язаного з переходом від (k - 1)-го такту до k-го, та розподілу ймовірності, пов'язаного з попереднім станом, над усіма можливими .


Розподіл ймовірності уточнення є пропорційним добуткові правдоподібності вимірювання та передбаченого стану.

Знаменник

є сталою відносно , тому ми завжди можемо замінити його коефіцієнтом , який на практиці зазвичай можна ігнорувати. Чисельник може бути обчислено і потім просто нормалізовано, оскільки його інтеграл повинен бути одиницею.

Застосування
- Фільтр Калмана, рекурсивний баєсів фільтр для багатовимірних нормальних розподілів
- Частинковий фільтр, послідовна методика на базі методу Монте-Карло, що моделює функцію густини ймовірності з використанням дискретних точок
- Оцінювачі на базі сіток, що ділять функцію густини ймовірності на дискретну сітку
Послідовне баєсове фільтрування
Послідовне баєсове фільтрування є розширенням баєсового оцінювання для випадку, коли спостережувание значення змінюється у часі. Це метод оцінювання справжнього значення спостережуваної змінної, що еволюціює з часом.
Цей метод має назву:
- фільтрування
- коли ми оцінюємо поточне значення, маючи попередні та поточні спостереження,
- згладжування
- при оцінюванні минулих значень за заданих поточних та минулих вимірювань, та
- передбачення
- при оцінюванні ймовірного майбутнього значення за заданих поточних та минулих вимірювань.
Ідея послідовного баєсовго фільтрування широко застосовується у керуванні та робототехніці.
Посилання
- Arulampalam, M. Sanjeev; Maskell, Simon; Gordon, Neil (2002). A Tutorial on Particle Filters for On-line Non-linear/Non-Gaussian Bayesian Tracking. IEEE Transactions on Signal Processing 50: 174–188. doi:10.1109/78.978374. (англ.)
- Diard, Julien; Bessière, Pierre; Mazer, Emmanuel (2003). A survey of probabilistic models, using the Bayesian Programming methodology as a unifying framework (PDF). cogprints.org. (англ.)
- Feynman-Kac models and interacting particle algorithms (a.k.a. Particle Filtering) (англ.) Теоретичні аспекти та перелік галузей застосування частинкових фільтрів
- Särkkä, Simo (2013). Bayesian Filtering and Smoothing (PDF). Cambridge University Press. Архів оригіналу за 2 квітня 2015. Процитовано 28 лютого 2015. (англ.)