Теорія керування
Теорія керування (англ. Control theory) — наука про принципи і методи керування різними системами, процесами і об'єктами.
Теоретичним підґрунтям теорії керування є кібернетика і теорія інформації.
Суть теорії керування: на основі системного аналізу об'єкта керування (ОК) складається його математична модель, після чого розробляється алгоритм керування (АК) для отримання бажаних характеристик плину процесу або досягнення цілей керування.
Дана галузь знань добре розвинена і знаходить широке застосування в сучасній техніці у вигляді такої дисципліни, як теорія автоматичного керування. У соціально-економічних системах теорію керування присвячено способам і методам аналізу, прогнозу і можливостям регулювання діяльності різних людських спільнот (світової спільноти, регіональних об'єднань, націй, суспільно-господарських груп). Теорія керування, як будь-яка наука, має свою методологію і методичне забезпечення. Проте в області природничих наук і техніки, теорія керування має значно більше успіхів, ніж в соціально-економічній сфері, де, очевидно, діє обмеження, що випливає з принципу, — «система не може пояснити саму себе».
Історія

Попри те, що системи керування різних видів існували ще з античних часів, більш докладне вивчення цієї області, почалося із досліду динаміки відцентрового регулятора, який провів фізик Джеймс Максвелл 1868 року, у роботі, що має назву On Governors.[1] Він описує і досліджує явище автоколивання, в якому відставання системи може призвести до надкомпенсації та несталої поведінки. Це викликало бурхливу цікавість до цієї теми. Однокласник Максвела, Едвард Раут, узагальнив висновки Максвела до всього класу лінійних систем.[2] Незалежно від них, 1877 року Адольф Гурвіц досліджував сталість системи з використанням диференційних рівнянь, у підсумку чого отримав результат, котрий відомий як теорема Раута-Гурвіца.[3][4]
Важливе застосування динамічного керування відбулося стосовно пілотованого польоту. Брати Райт здійснили свої перші вдалі тестові польоти 17 грудня 1903 року і серед інших авіаторів вони відрізнялися здатністю керувати польотом протягом суттєвого проміжку часу (більше ніж просто можливість створювати підіймальну силу за допомогою аеродинамічного профілю, що вже було загально відомо). Безперервне, надійне керування літаком було потрібне для того, щоби політ міг тривати довше ніж декілька секунд.
Відцентровий регулятор використовували для регулювання швидкості вітряного млина.[5]
У часи Другої світової війни, теорія керування стала важливою галуззю дослідження. Ірмгард Флюгге-Лотц розробила теорію дискретних автоматичних систем керування і застосувала принцип двопозиційного регулювання для розробки обладнання автопілоту літака.[6][7] Іншими областями застосування дискретних регуляторів, є системи керування вогнем, системи навігації і електроніка.
Визначення і завдання
Кібернетика встановила, що керування властиве лише системним об'єктам. Загальним у процесах, є його антиентропійний характер, спрямованість на впорядкування системи.
Процес керування можна розділити на декілька етапів:
- Збір і обробка інформації.
- Аналіз, систематизація, синтез.
- Постановка на цій основі цілей. Вибір методу керування, прогноз.
- Впровадження вибраного методу керування.
- Оцінка ефективності вибраного методу керування (зворотний зв'язок).
Кінцевою метою теорії керування є універсалізація, отже узгодженість, оптимізація і найбільша ефективність роботи систем.
Методи керування
Методи керування технічними системами та іншими об'єктами, що розглядаються теорією, можуть ґрунтуватися на одному з трьох основоположних принципів:
- принцип розімкненого керування;
- принцип компенсації;
- принцип зворотного зв'язку.
Керування можна розділити на два види:
- стихійне: дія відбувається як підсумок взаємодії суб'єктів (синергетичне керування);
- свідоме: планомірна дія об'єкта (ієрархічне керування).
При ієрархічному керуванні мета роботи системи, задається її надсистемою.
Приклади сучасних методів керування:
- Нелінійне керування;
- Теорія катастроф;
- Адаптивне керування;
- Побудова оптимальних робастних регуляторів;
- Ігрові методи в керуванні;
- Інтелектуальне керування;
Класифікація
Існують наступні найзагальніші підходи до теорії керування:
- Процесний підхід ґрунтується на ідеї існування деяких універсальних засобів керування.
- Системний підхід склався на підґрунті загальної теорії систем: система — це деяка цілісність, що складається із взаємозалежних підсистем, кожна з яких вносить свій внесок до дії цілого.
- Ситуаційний підхід розглядає будь-яку організацію як відкриту систему, що постійно взаємодіє із зовнішнім середовищем, отже, і головні причини того, що відбувається усередині організації, слід шукати поза нею, тобто в тому становищі, в якому вона дійсно працює.
- Універсальний підхід склався на базі наукової школи Універсології, теорії універсального керування, теорії перехідних процесів, теорії відносності свідомості, і розглядає будь-яку систему в сукупності її вертикальних і горизонтальних зв'язків.
- Субстратний підхід, засновано на структурній оптимізації стратегії і ухвалюваних рішень за допомогою виявлення субстратів (ключових моментів ефективності) в значущих класах інформаційного контексту ситуації керування. Процес побудови такої структурно-субстратно-оптимальної стратегії, називають структурною оптимізацією.
Приклад
Розглянемо систему автомобільного круїз-контролю, що є пристроєм, розробленим для підтримання постійної швидкості автомобіля. Результат на виході системи — швидкість автомобіля. Вхідними параметрами системи є обертальний момент двигуна, який регулюється дроселем.
Найпростішим способом, є фіксація положення дроселя, коли водій вмикає пристрій круїз-контролю. Однак, на горбистій місцевості, автомобіль буде сповільнюватися, коли їде на гору, і пришвидшуватися, коли їде з гори. Це дія принципу розімкненого керування, тому що відсутній безпосередній зв'язок між результатом на виході системи і її вхідними параметрами.
В системі керування замкненого типу, за допомогою зворотного зв'язку, дросель регулюється відповідно до наявної швидкості автомобіля, задля підтримання бажаної швидкості. Цей зворотний зв'язок вирівнює зовнішні завади в системі, такі як зміни в нахилі дороги чи вітрове навантаження.
Відкритий і замкнений цикли керування
Існує два типи циклів керування: відкритий цикл керування і замкнутий цикл керування (із зворотнім зв'язком). Теорія керування переймається лише системами із замкненим циклом керування.
У випадку із відкритим циклом керування, керувальна дія ніяк не залежить від «виходу процесу» (або «контрольованої змінної процесу»). Хорошим прикладом цього, є котел центрального опалення, який керується лише реле часу, тому тепло буде вироблятися постійно, не залежно від температури в будинку. Керувальною дією є увімкнення/вимкнення бойлера таймером, а змінна процесу (температура в будинку), ніяк з цим не пов'язана.
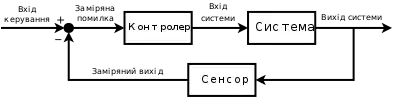
Замкнений цикл керування, керувальна дія буде залежати від зворотного зв'язку процесу, що представлена у вигляді змінної процесу. У разі прикладу з бойлером, у замкненому циклі використовувався б термостат для порівняння температури в будинку (змінної процесу) із температурою, що виставлена на термостаті (задана точка). Це дозволяє задати керування регулятора, яке б підгримувало бажану температуру в будинку за допомогою вмикання/вимикання бойлера. Отже регулятор із замкненим циклом має зворотній зв'язок, що дозволяє контролеру здійснювати керувальну дію аби керувати змінною процесу, так щоб вона досягала значення заданого входу або «точки установки». Тому, контролери із замкненим циклом керування також називаються контролерами із зворотним зв'язком.[8]
Передаткова функція замкненого циклу
Вихід системи y(t) подається назад через підсумок вимірювання давача F для порівняння зі зразковим значенням r(t). Контролер C приймає на вхід значення помилки e (різницю) між зразковим значенням і виходом для того, щоби змінити вхідне керування u, що подається на систему P, яка керується. Це можна побачити на малюнку. Цей тип контролера називають контролером із замкненим циклом, або контролером із зворотнім зв'язком.
Також системи керування можуть мати один-вхід-один-вихід (англ. single-input-single-output — SISO); або мати більше ніж один вхід/вихід MIMO (англ. Multi-Input-Multi-Output). У такому випадку змінні задають у вигляді векторів, замість простих скалярних значень. Для деяких систем із розподіленими параметрами вектор може бути нескінченновимірними (зазвичай функціями).
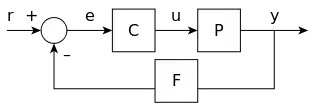
Якщо ми матимемо контролер C, завод P, і датчик F, такі що є лінійними і інваріантними до часу (тобто, елементи їх передавальних функцій C(s), P(s), і F(s) не залежать від часу), вищенаведену систему можна аналізувати за допомогою перетворення Лапласа над змінними. Отримаємо наступні рівняння:



Якщо отримати розв'язок відносно Y(s) в термінах R(s), отримаємо

Вираз називають передаточною функцією замкненого циклу системи. Чисельник задає коефіцієнт корисної дії прямого циклу від r до y, а знаменник дорівнює одиниці плюс коефіцієнт зворотньої дії. Якщо , тобто, воно має велику норму при кожному значенні s, і якщо , тоді Y(s) приблизно дорівнюватиме R(s) і вихід буде слідувати близько до еталонного входу.



ПІД регулятор
Пропорційно-інтегрально-диференціальний регулятор (ПІД регулятор або контролер) це контур керування із механізмом зворотного зв'язку. Ця техніка керування часто застосовується в системах керування.
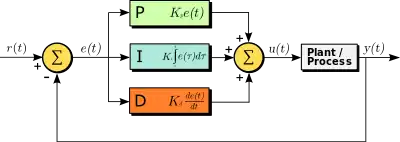
ПІД контролер постійно розраховує значення помилки , що є різницею між бажаною точкою установки і виміряною змінною процесу і застосовує корекцію на основі пропорційної, інтегральної, і диференційних складових. Термін ПІД регулятор є скороченою назвою, що посилаються на ці три складові, що діють на сигнал помилки для утворення сигналу керування.

Теоретичне вивчення і застосування таких контролерів бере початок ще в 1920-их роках, тоді вони майже втілювалися у вигляді аналогових систем керування; спочатку у механічних контролерах, а потім із використання дискретної електроніки і згодом у промислових комп'ютерах. ПІД регулятор є, напевне, самим часто вживаним способом керування із зворотнім зв'язком.
Якщо u(t) є сигналом керування, що надсилається до об'єкту керування, y(t) є виміряним вихідним результатом і r(t) є бажаним виходом, а це отримана помилка, тоді ПІД контролер матиме наступну загальну форму


Бажана динаміка замкнутого циклу досягається за допомогою коригування трьох параметрів , і , дуже часто це відбувається ітеративно, шляхом «підлаштування», і без спеціальних знань про влаштування моделі. Стабільність часто можна забезпечити лише за допомогою пропорційної складової. При застосуванні інтегральної складової існує можливість відмовитися від кроку порушення (відповідно до вимог автоматизації виробництва). Диференційна складова використовується для пришвидшення або сповільнення відповіді. ПІД є однією з найуспішніших систем керування: однак, вони не можуть використовуватися в декількох більш складних випадках, особливо при розгляді систем типу MIMO.



Застосування перетворення Лапласа дозволяє отримати наступне рівняння для ПІД контролера


із передатковою функцією ПІД контролера

Як приклад налаштування ПІД контролера у системі замкненого циклу , розглянемо систему 1-го порядку, що заданий як


де і деякі константи. Система видає вихідний зворотній сигнал через



де також є сталою. Тепер, якщо ми задамо , , і , ми можемо виразити передаткову функцію ПІД контролера у вигляді ряду наступним чином:





Застосовуючи , , і до передаткової функції замкнутого циклу , отримаємо, що задавши




. Із таким налаштуванням у цьому прикладі, вихідний сигнал системи точно відповідає входу.

Однак, на практиці, ідеальний диференціатор ні є ні фізично здійсненним ні практично бажаним[9] через посилення шумів і резонансних режимів у системі. Тому, натомість використовують компенсатор фазового типу або диференціатор, котрий здійснює операцію диференціювання наближено.
Основні стратегії керування
Кожна система керування повинна забезпечувати і гарантувати стабільну поведінку замкненого циклу. У випадку лінійних систем, це можна досягти шляхом безпосереднього розміщення полюсів. У випадку не лінійних систем використовують специфічні теорії (які як правило основані на теорії Олександра Ляпунова), які допомагають забезпечити стабільність без урахування внутрішньої динаміки системи. Можливість забезпечити різні специфікації може залежати від моделі, яка розглядається, а також від обраної стратегії керування.
- Список основних технік керування
- Адаптивне керування використовує on-line ідентифікацію параметрів процесу, або модифікацію коефіцієнтів підсилення контролера, що допомагає отримати ефективні властивості. Адаптивне керування вперше було застосоване у аерокосмічній промисловості в 1950-их, і знайшло успішне застосування у цій галузі.
- Ієрархічна система керування це тип системи керування, в якій множина пристроїв і програма управління впорядковані у ієрархічне дерево. Якщо зв'язки у дереві реалізуються за допомогою комп'ютерної мережі, тоді ієрархічна система керування є формою мережевої системи управління.
- Інтелектуальне управління використовує для керування динамічною системою різноманітні методи штучного інтелекту такі як штучні нейронні мережі, баєсова ймовірність, нечітка логіка,[10] машинне навчання, еволюційне моделювання і генетичний алгоритм.
- Оптимальне управління це особлива техніка керування, в якій сигнал керування оптимізує певний «індекс витрат»: наприклад, у випадку із керуванням супутником, це є необхідна тяга реактивного двигуна яка дає можливість досягти необхідної траєкторії, при якій споживатиметься мінімальна кількість пального. Існує два методи оптимального управління, які застосовуються у промисловості, які можуть гарантувати стабільність замкненого циклу. Цими методами є Управління із прогнозуванням моделі і лінійно-квадратичне Гауссове управління. Перший метод дозволяє більш чітко враховувати обмеження, які накладаються на сигнали системи, що є важливою функцією багатьох промислових процесів. Однак, структура «оптимального управління» в управлінні із прогнозуючими моделями є лише засобом досягнення подібного результату, оскільки вона не оптимізує справжній індекс продуктивності системи із замкненим циклом. Такі системи в поєднанні із ПІД регуляторами є найбільш широко вживаною методикою керування при автоматизації процесів.
- Робастне керування напряму стосується невизначеності підходу для розробки контролера. Контролери створені за допомогою методів робастного керування здатні впоратися із невеликими відмінностями між справжньою системою і номінальною моделлю, що використовувалася при розробці.[11] Перші методи розроблені Боде та іншими були досить надійними; методи простору-станів винайдені в 1960-их та 1970-их іноді мають нестачу надійності. Прикладами сучасних технік надійного керування є H-нескінченне керування розроблений Дунканом МакФарлейном і Кейт Гловер, регулятор ковзного режиму розроблений Вадимом Уткіним, і протоколи безпеки розроблені для контролювання великими гетерогенними популяціями електричних навантажень у застосуваннях Smart Power Grid.[12] Методи робастного керування спрямовані на досягнення надійної роботи та/або стійкості при наявності невеликих помилок моделювання.
- Стохастичне керування займається дизайном систем управління при непевності в моделі. В типовій задачі стохастичного управління, припускають, що існує деякий випадковий шум і порушення в моделі, а контролер і методика управління повинні враховувати ці випадкові відхилення.
Примітки
- Maxwell, J.C. (1868). On Governors. Proceedings of the Royal Society of London 16: 270–283. JSTOR 112510. doi:10.1098/rspl.1867.0055.
- Routh, E.J.; Fuller, A.T. (1975). Stability of motion. Taylor & Francis.
- Routh, E.J. (1877). A Treatise on the Stability of a Given State of Motion, Particularly Steady Motion: Particularly Steady Motion. Macmillan and co.
- Hurwitz, A. (1964). On The Conditions Under Which An Equation Has Only Roots With Negative Real Parts. Selected Papers on Mathematical Trends in Control Theory.
- Control Theory: History, Mathematical Achievements and Perspectives | E. Fernandez-Cara1 and E. Zuazua
- Flugge-Lotz, Irmgard; Titus, Harold A. (October 1962). Optimum and Quasi-Optimum Control of Third and Fourth-Order Systems. Stanford University Technical Report (134): 8–12.
- Hallion, Richard P. (1980). У Sicherman, Barbara; Green, Carol Hurd; Kantrov, Ilene та ін. Notable American Women: The Modern Period: A Biographical Dictionary. Cambridge, Mass.: Belknap Press of Harvard University Press. с. 241–242. ISBN 9781849722704.
- «Feedback and control systems» — JJ Di Steffano, AR Stubberud, IJ Williams. Schaums outline series, McGraw-Hill 1967
- Ang, K.H.; Chong, G.C.Y.; Li, Y. (2005). PID control system analysis, design, and technology. IEEE Transactions on Control Systems and Technology 13 (4): 559–576.
- Liu, Jie; Wilson Wang; Farid Golnaraghi; Eric Kubica (2010). A novel fuzzy framework for nonlinear system control. Fuzzy Sets and Systems 161 (21): 2746–2759. doi:10.1016/j.fss.2010.04.009.
- Melby, Paul; et., al. (2002). Robustness of Adaptation in Controlled Self-Adjusting Chaotic Systems. Fluctuation and Noise Letters 02 (4): L285–L292. doi:10.1142/S0219477502000919.
- N. A. Sinitsyn. S. Kundu, S. Backhaus (2013). Safe Protocols for Generating Power Pulses with Heterogeneous Populations of Thermostatically Controlled Loads. Energy Conversion and Management 67: 297–308. arXiv:1211.0248. doi:10.1016/j.enconman.2012.11.021.
Література
- «Енциклопедія кібернетики», відповідальний ред. В. Глушков, 2 тт., 1973, рос. вид. 1974
- Бублик Б. Н., Кириченко Н. Ф. Основы теории управления. — К.: Вища школа., 1975. — 328 с
- Іванов А. О. Теорія автоматичного керування: Підручник. — Дніпропетровськ: Національний гірничий університет. — 2003. — 250 с.
