Сервеєр-7
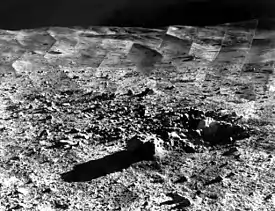
Сервеєр-7 (англ. Surveyor 7 — геодезист) — сьомий і останній американський спускний апарат, запущений для здійснення м'якої посадки на небесне тіло, а саме на Місяць, у рамках місячної програми «Сервеєр» із запуску безпілотних апаратів з метою вивчення Місяця з його поверхні. П'ятий апарат з серії «Сервеєр», що успішно здійснив м'яку посадку на Місяць, в кратері Тихо 41.01° пд. ш. 11.41° зх. д.. На Землю було передано 21 091 зображень. Апарат був єдиним у серії, що здійснив посадку на плато.
| Сервеєр-7 | |
|---|---|
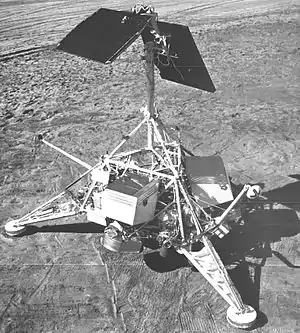 Модель «Сервеєра» на Землі | |
| Основні параметри | |
| COSPAR ID | 1968-001A |
| NORAD ID | 03091 |
| Організація |
|
| Виготівник |
|
| Тип апарата | посадковий |
| Ракета-носій | Атлас-Центавр |
| Номер запуску | ЕйСі-15 (англ. AC-15) |
| Космодром | Мис Канаверал, 36Ей (англ. 36A) |
| Технічні параметри | |
| Маса | 305,7 |
| Розміри | 4,3 м (на Місяці). Висота приблизно 3 м. |
| Потужність | до 85 Вт |
| Джерела живлення | сонячні батареї |
| Посадка на небесне тіло | |
| Небесне тіло | Місяць |
| Дата і час посадки | 10 січня 1968, 01:05:36 UTC |
| Місце посадки | кратер Тихо |
| Прилади | |
| Головні прилади | телекамера, альфа-спектрометр |
Політ
«Сервеєр-7» було запущено 7 січня 1968 о 06:30:00.54 UTC ракетою-носієм Атлас-Центавр-Д з космодрому на мисі Кеннеді. Апарат вийшов на низьку опорну орбіту. Ступінь Центавр вивів Сервеєр на траєкторію польоту до Місяця і відокремився о 07:05:16 UTC.
7 січня о 23:30:10 UTC відбулась корекція орбіти.
Космічний апарат приземлився на місячну поверхню 10 січня 1968 о 01:05:36.3 UTC, за 46 км на північ від зовнішнього ободу кратера Тихо. Операції космічного апарату почалися незабаром після м'якої посадки і були припинені 26 січня 1968 о 14:12 UTC, за 80 годин після заходу Сонця. Телевізійна камера передала 20 993 зображення. Альфа спектрометр
Операції впродовж другого місячного дня почалися 12 лютого о 19:01 UTC. Було передано додатково 45 зображень.
Робота «Сервеєра» припинилась 21 лютого о 12:24 UTC.
Конструкція
Рама
Рама апарата мала базову трикутну форму з алюмінієвих труб, що спрощувало монтування науково-технічного обладнання. У кутах рами кріпились три відкидні посадкові ноги з амортизаторами і опорами. Під час запуску опори перебували складеними під обтічником. Опори і амортизаційні блоки, укріплені на кожній нозі, складались з алюмінієвих чарунок, за рахунок деформації яких поглиналася енергія посадкового удару. Опори розкладалися на 4,3 м від центру апарата. Апарат був висотою приблизно 3 м.
Живлення
На вершині вертикальної щоглі висотою понад один метр, розташованої в центрі трикутника, були сонячні батареї площею 0,855 м² з 792 фотоелементів, що створювали потужність до 85 Вт, додатково використовувались срібно-цинкові батареї.
Зв'язок
До центру щогли кріпилась рухома плоска антена з високим коефіцієнтом підсилення, що передавала телевізійні зображення. Дві неспрямовані антени на кінцях розкладних щогл використовувались для передачі і прийому команд. Апарат мав два передавача і два приймача.
Теплозахист
Теплозахист забезпечувався поєднанням білої фарби і оздобленням з високим коефіцієнтом тепловиділення, нанесеними на поліровану алюмінієву основу.
Відсіки апаратури
На рамі у двох відсіках з контрольованою температурою розміщувалась електронна апаратура. Відсіки були вкриті потужною теплоізоляцією, крізь яку проходили теплові канали, також у відсіках були терморегулювачі і маленькі електричні нагрівачі. В одному відсіку, у якому підтримувалася температура від 5 до 50 °C, розміщувалось обладнання для зв'язку і контролю електропостачання. В іншому, у якому підтримувалася температура від −20 до 50 °C, розміщувалось обладнання для обробки сигналів.
Інженерне обладнання
Телевізійна камера була змонтована близько біля вершини триніжка. В структуру були вставлені тензодатчики, температурні сенсори та інше інженерне обладнання.
Один фотометричний приціл було змонтовано біля кінця посадкової опори. одна коротка стріла розкладалася з центру структури.
Сонячний сенсор, датчик Канопуса і швидкі гіроскопі, що оберталися у кардановій підвісці, допомагали визначити орієнтацію апарата.
Рух і орієнтація
Рух і орієнтація здійснювались за допомогою холодного азоту під час фази польоту. Твердопаливний двигун у формі сталевої кулі, змонтований у центрі апарата, використовувався при посадці. Три малі ракетні двигуни з керованою тягою використовувались під час корекції орбіти і посадки. Двигуни працювали на гідраті монометилгідразину (пальне) і суміші MON-10 (90 % диоксиду динітрогену (N2O2) і 10 % монооксиду азоту (NO)). Кожна камера згоряння мала тягу 130—460 Н, один двигун повертався для контролю крену. Паливо зберігалося у сферичних баках, прикріплених до рами апарата.
Схема посадки
Висотомір вмикав головний ракетний двигун для початкового гальмування. Після закінчення роботи твердопаливного двигуна відокремлювались висотомір і двигун. Після цього вмикались доплерівський і висотомірний радари, що забезпечували інформацію для роботи автопілота, який контролював систему малих двигунів до посадки.
Обладнання
Метою місії було здійснити м'яку місячну посадку на плато, звідки добре проглядається море, щоб отримати зображення місцевості і зразок місячної поверхні, відмінних від інших місій «Сервеєр»; отримати телевізійне зображення після посадки; визначити відносний вміст хімічних елементів; операції з місячним матеріалом; отримати дані динаміки приземлення; отримати дані тепловізійного і радіолокаційного відображення.
Інструменти апарата були подібні до попередніх місій, але було більше наукового обладнання, зокрема телекамеру з поляризаційними фільтрами, інструмент для розсіювання альфа-частинок, ґрунтозбірник (подібний до використаного в польоті «Сервеєра-3»), два стрижневі магніти було прикріплено до опорних поверхонь, два підковоподібні магніти — до совка ґрунтозабірника, щоб виявити присутність магнітного матеріалу в місячному ґрунті.
Допоміжні дзеркала: троє були використані для огляду поверхні навколо космічного апарату, одне для стереоскопічного огляду поверхні ґрунтозабору, і сім для огляду місячного матеріалу, нанесений на космічний корабель.
«Сервеєр-7» став першим зондом, що виявив слабке світіння на місячному горизонті після настання темряви. Феномен вважається світлом, відбитим від місячного пилу, що здійснює левітацію під дією електростатичного заряду[1].
Телекамера
Телевізійна камера складалася з трубки відикона, двох лінз із фокусною відстанню 25 і 100 мм, затворів, поляризаційних фільтрів (замість кольорових фільтрів камер попередніх апаратів) й діафрагми, встановлених вздовж осі, що була нахилена на 16 градусів до центральної осі апарата. Телекамера була встановлена під дзеркалом, яке могло переміщуватись за азимутом (горизонтально) і висотою (вертикально). Робота камери повністю залежала від надходження належних команд із Землі. Покадрове охоплення місячної поверхні було отримано після оберту на 360 градусів за азимутом в проміжку від приблизно 90 градусів вище площини, перпендикулярної осі «Z» камери до −60 градусів нижче цієї площини.
Поляризаційні фільтри використовувались для виявлення і вимірювання лінійно поляризованого компонента світла, розсіяного від поверхні Місяця. Оптичні поверхні були найчистішими, порівняно з іншими місіями, через змінену раму дзеркала.
Були використані режими роботи телекамери з передачею 600 і 200 ліній. Більшість інформації було передано в режимі 600 ліній.
У режимі 200 ліній один кадр сканувався кожні 61,8 секунди і дані передавалися неспрямованою антеною. Повна передача зображення відеосигналом в режимі 200 ліній тривала 20 секунд на частоті 1,2 кГц.
Фотографії у режимі 600 ліній передавались спрямованою антеною. Отримані фотографії сканувались раз на 3,6 секунди. Кожне зображення в режимі 600 ліній вимагало номінально одну секунду для зчитування картинки з відикона, і частоту 220 кГц для передачі цифрового сигналу. Телевізійні зображення були показані на Землі у повільному скануванні на екрані телевізора, який був вкритий фотолюмінофором довгострокової стійкості відповідно до номінальної максимальної частоти кадрів. Один кадр зображення утворювався з кожного отриманого фото в режимі реального часу зі швидкістю, сумісною з отримуваним зображенням. Ці дані були записані на магнітну стрічку відеомагнітофона і на кіноплівку шириною 70 мм.
Динамічний діапазон і чутливість цієї камери були трохи меншими, ніж у камери Сервеєра-6.
Камера передала 20961 фотографії під час свого першого місячного дня, з 10 по 22 січня 1968. У другій місячний день, з 12 по 14 лютого камера працювала в режимі 200 ліній через втрату горизонтальної розгортки в режимі 600 ліній. Було передано 45 фотографій, після чого камера вимкнулась внаслідок втрати електричної потужності.
Альфа-спектрометр
Аналізатор розсіювання альфа-частинок поверхнею був розроблений для безпосереднього вимірювання кількості основних елементів місячної поверхні. Прилад складався з шести джерел альфа-частинок кюрія 242, що прицільно опромінювали зразок крізь отвір діаметром 10 мм у нижній частині приладу, і двох паралельних, але незалежних детекторних систем заряджених частинок. Одна система мала два датчика виявлення енергетичних спектрів альфа-частинок, розсіяних від місячної поверхні, інша, з чотирма датчиками, виявляла енергетичні спектри протонів внаслідок реакцій (альфа-частинок і протонів) в поверхні матеріалу. Кожен детектор був з'єднаний з аналізатором висоти імпульсу. Пакет електроніки у відсіку, розташованому на космічному апараті, постійно передавав телеметричні сигнали на Землю при виконанні експерименту. У спектрах зразків було виявлено кількісну інформацію про всі основні елементи, крім водню, гелію і літію. Експеримент тривалістю 46 годин надав дані за три робочі сесії впродовж першого (3 12 по 23 січня) і другого (з 13 по 21 лютого) місячного днів. Вимірювались відбивні властивості непорушеного ґрунту, місячного каменю і поверхні у відкритій траншеї.
Пристрій аналізу відбитого випромінювання не розгорнувся нормально. Оператори місії використали ґрунтозабірник для підштовхування приладу у правильне положення для здійснення експериментів.
Механізм ґрунтозабору
Механізм ґрунтозабору був розроблений, щоб викопати і перемістити місячний ґрунт, водночас відбувалось фотографування процесу для отримання властивостей місячної поверхні місячної поверхні. Пробозабірник був встановлений нижче телевізійної камери і складався переважно з совка розмірами 120 мм у довжину і 50 мм завширшки. Совок складався з контейнера, заточеного леза, і електромотора, що відкривав і закривав контейнер. В опорній плиті совка було два вбудовані підковоподібні магніти прямокутного перерізу. Совок був здатний утримувати максимально твердої речовини з місячної поверхні діаметром приблизно 32 мм і максимум 100 см ³ гранульованого матеріалу. Совок був встановлений нижче телекамери на пантографі, який розкладався на довжину приблизно 1,5 м або складався близько до космічного апарата електричним приводом. Рука могла переміщуватись з азимутом від 40 до −72 градусів або бути піднята на 130 мм електроприводами. Він також міг з розгоном торкнутися місячної поверхні з використанням сили прискорення. Ґрунтозабірник здійснив 16 випробувань підшипників, сім пробних копань траншей і 2 випробувальні удари. Оскільки ґрунтозабірник було розміщено близько до альфа-аналізатора для переміщення приладу у необхідне положення, то його було використано для розгортання альфа-аналізатора у правильне положення після неправильного розгортання.
Загальний час роботи становив 36 годин впродовж 11-23 січня. 14 лютого прилад відповідав на команди, що свідчило про його працездатність після місячної ночі. Однак система живлення не могла забезпечити достатньо потужності для ефективної роботи.
Примітки
Джерела
- Сервеєр-7 в каталозі НАСА(англ.)
- Програма Сервеєр в космічних сторінках Гюнтера(англ.)
Шаблон:Космічні запуски 1968
