Шайбовий механізм
Ша́йбовий механі́зм (англ. swashplate) — механізм типу «похила планшайба — стрижні», що використовується у машинобудуванні для перетворення обертального руху вала у вертально-поступальний рух стрижнів, розташованих паралельно до осі вала, або для зворотного перетворення.
Конструкція та принцип роботи
Винахідником конструкції шайбового механізму вважається[1] австралійський інженер-механік Ентоні Мічелл[2].
Шайбовий механізм складається з вала, двох дисків, які називаються планшайбою, і шарнірно прикріплених до них стрижнів. Якщо робоча поверхня диска займе положення перпендикулярне до осі вала, обертання якого буде викликати обертання одного з дисків, тоді стрижні будуть залишатися у спокої. Однак відхилення диска від перпендикулярного положення призведе до того, що будь-яка з точок на краю диска, що не обертається буде здійснювати коливальний рух. Чим більшим буде кут відхилення нормалі до робочої поверхні обертового диска від осі обертання, тим більшою буде амплітуда зазначених коливань. Якщо до диска, що не обертається будуть прикріплені, розташовані у напрямних, стрижні, то вони коливатимуться разом з краєм диска, тобто будуть здійснювати вертально-поступальний рух.
Конструкція такого механізму дещо нагадує кулачковий механізм із торцевим кулачком.
Застосування шайбового механізму
Шайбовий механізм може використовуватись у двигунах внутрішнього згоряння замість корбово-гонкового механізму, як це реалізовано у аксіальному двигуні[3] та знайшло використання у деяких конструкціях двигунів Стірлінга.
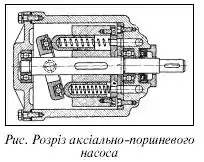
Механізм типу «похила планшайба-стрижні» є основою конструкції аксіально-поршневих гідромашин (насосів і гідромоторів). Стрижні можуть бути приєднані до плунжерів або поршнів, що вкладені у циліндри. Потужність може передаватись від вала до плунжерів, як це відбувається в аксіально-поршневому насосі, або від плунжерів потужність може через диск передаватись до вала, як це реалізовано в аксіально-поршневому гідромоторі.

У конструкціях гелікоптерів важливу роль відіграє автомат перекосу (шайба перекосу) лопатей, який може бути побудований на базі шайбового механізму. У цьому випадку стрижні шарнірно сполучені з обертовим диском, а зміною кута нахилу нерухомого диска керує пілот з кабіни через систему кінематичних зв'язків. Цей тип керування кутом нахилу лопатей використовується для створення різної підйомної сили з різних боків корпуса вертольота, що приводить до циклічної зміни кута атаки залежно від положення лопаті.
Аналогічний механізм часто використовується в деяких видах витратомірів, що застосовуються в системах водопостачання, хоча в них коливальний рух диска не завжди перетворюється в вертально-поступальний рух.
Активна фазована антенна решітка, що використовується в авіації, виконується у вигляді плаского диска, здатного сканувати повітряний простір на кут до 60 градусів у будь-якому напрямі від осі літака. При закріплення таких радарів на шайбовому механізмі кут нахилу планшайби додається до кута електронного сканування. Зазвичай максимальний кут нахилу планшайби обирається близько 40 градусів, і тоді загальний кут сканування радарів сягає 200 градусів[4].
Див. також
Інші механізми для перетворення обертального руху у прямолінійний:
Примітки
- Cherry, T. M. (1962). Anthony George Maldon Michell. 1870-1959. Biographical Memoirs of Fellows of the Royal Society 8: 90–103. doi:10.1098/rsbm.1962.0007.
- U.S. Patent 1 409 057AMechanism for the interconversion of reciprocating and rotary motion Michell Anthony George Maldon, priority date: 1917-07-19
- Аксиальные двигатели с шайбовым силовым механизмом (рос.)
- Gripen NG AESA Radar