Виконавчий механізм
Викона́вчий механі́зм (ВМ), Викона́вчий елеме́нт (рос. исполнительное устройство, англ. actuator) — у системах автоматичного регулювання — пристрій, що безпосередньо здійснює механічне переміщення (чи поворот) органу регулювання об'єкта управління і змінює його стан.
Складають одну з останніх ланок системи автоматичного регулювання. Використовуються для управління органами регулювання . Виконавчий механізм, як правило, складається з трьох основних пристроїв: сервомотора (серводвигуна), джерела живлення та навантаження.
Загальний опис
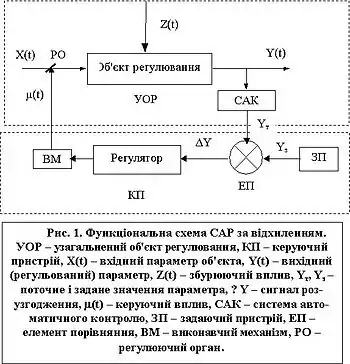
Місце виконавчого механізму (ВМ) у системі автоматичного регулювання (САР) показано на рис. 1.
Зміна положення органу регулювання викликає зміну потоку енергії або матеріалу, що надходять на об'єкт, і тим самим впливає на робочі машини, механізми і технологічні процеси, усуваючи відхилення регульованої величини заданого значення. Виконавчий механізм не лише змінює стан керованого об'єкта, але і переміщає регулюючий орган відповідно до заданого закону регулювання при мінімально можливих відхиленнях. У більшості випадків виконавчі механізми діють від сторонніх джерел енергії, оскільки безпосереднє управління виконавчим механізмом від первинних елементів регулювання (реле, датчиків тощо) неможливе внаслідок їхньої малої потужності, недостатньої для впливу на регулюючий орган.
Виконавчий механізм, як правило, складається з сервомотора постійного або змінного струму та джерела живлення. Ряд виконавчих механізмів включають також підсилювачі.
Класифікація виконавчих механізмів
За видом споживаної енергії виконавчі механізми поділяють на електричні, пневматичні і гідравлічні. Найбільшого поширення набули електричні ВМ. Пневматичні і гідравлічні виконавчі механізми застосовуються у разі необхідності отримання великої потужності при переміщенні робочого органу та у вибухонебезпечних середовищах.
Конструкції виконавчих механізмів різноманітні. У першу чергу вони розрізняються за характером руху вихідної ланки (прямохідні і поворотні) і за видом чутливого елемента, який перетворює енергію командного сигналу в переміщення вихідної ланки. Вид використовуваної енергії також позначається на конструктивному оформленні виконавчого механізму.
За конструктивними ознаками розрізняють також:
- Кривошипно-шатунний виконавчий механізм
- Кривошипно-кулісний виконавчий механізм
- Синусний виконавчий механізм
- Кривошипно-коромисловий виконавчий механізм
- Маніпулятор-виконавчий механізм
- Мальтійський виконавчий механізм
- Осцилювальний виконавчий механізм
Електричні виконавчі механізми
Електричні виконавчі механізми можуть бути контактними і безконтактними. Пусковим пристроєм контактного виконавчого механізму є реверсивний магнітний пускач, безконтактного — магнітний підсилювач.
У загальному випадку електричні виконавчі механізми складаються з наступних основних елементів: реверсивного електродвигуна; редуктора, що знижує частоту обертання вихідного вала; вихідного елемента, що передає зусилля або крутильний момент регулювальному органу; додаткових пристроїв (кінцевих вимикачів), що забезпечують зупинку виконавчого механізму в крайніх положеннях; пристроїв зворотного зв'язку для роботи в системах автоматичного регулювання або для дистанційного показу положення вихідного елемента виконавчого механізму; штурвал ручного привода (деякі модифікації).
У залежності від модифікації цих ВМ у них використовуються двофазні конденсаторні електродвигуни з порожнистим ротором, що мають добрі динамічні характеристики і допускають тривалу роботу в застопореному режимі при повній напрузі живлення, а також трифазні асинхронні електродвигуни з короткозамкнутим ротором (для виконавчих механізмів великої потужності).
Як пристрій зворотного зв'язку застосовують реостатні, індуктивні і феродинамічні перетворювачі переміщення.
Покажчики положення вихідного вала, що комплектуються з деякими електричними ВМ, являють собою стрілочні прилади зі шкалою 0—100%.
Найбільше поширення в збагачувальній промисловості отримали електричні ВМ типу МЭО та ИМ 2/120.
Пневматичні виконавчі механізми (ПВМ)
За видом чутливого елемента, який перетворює тиск стисненого повітря в перестановочне зусилля, пневматичні ВМ поділяються на мембранні, поршневі, сильфонні і лопатеві. З них тільки лопатеві безпосередньо створюють поворотний рух вихідної ланки; інші своїм переміщенням створюють поступальний рух штока, який потім за допомогою додаткового пристрою може бути перетворений у поворотний. Тиск використовуваного в пневматичних ВМ стисненого повітря зазвичай не перевищує 0,6 МПа.
У мембранному виконавчому механізмі переміщення вихідного штока в одному напрямі створюється тиском стислого повітря в мембранній порожнині, а в іншому — силою стислої пружини (пружинні мембранні виконавчі механізми). Ці механізми мають вихідний шток з поворотно-поступальним рухом, як правило, конструктивно пов'язаний з регулювальними органами. У залежності від напряму руху штока при підвищенні тиску повітря у мембранній порожнині розрізнюють механізми прямої і зворотної дії. У поршневих виконавчих механізмах зусилля, що переміщує вихідний шток, створюється тиском робочого середовища в поршневих порожнинах. У порівнянні з мембранними вони мають більшу величину переміщення вихідного штока.
Технічні вимоги до виконавчих елементів
- потужність сервомотора повинна забезпечувати при всіх режимах зміну положення регулюючого органу з заданою швидкістю;
- лінійне або кутове переміщення сервомотора на виході повинно бути узгоджене з відповідним переміщенням регулюючого органу;
- характеристика сервомотора повинна бути пропорційна вхідному сигналу;
- відношення кінетичної енергії рухомих частин до потужності сервомотора повинно бути мінімальним.
Механічна характеристика виконавчого механізму — це залежність кутової швидкості вала двигуна ωдв від приведеного до вала двигуна моменту опору Мо, потрібного для здолання робочим органом навантаження, тобто ωдв = f(Мо).
Література
- Папушин Ю. Л., Білецький В. С. Основи автоматизації гірничого виробництва. — Донецьк : Східний видавничий дім, 2007. — 168 с. — ISBN 978-966-317-004-6.
- Іванов А. О. Теорія автоматичного керування: Підручник. — Дніпропетровськ: Національний гірничий університет. — 2003. — 250 с.
- Енциклопедія кібернетики. тт. 1, 2. — К.: Головна редакція УРЕ, 1973. — 584 с.
