ГЛОНАСС
ГЛОНАСС (Глобальна Навігаційна Супутникова Система) — радянська/російська радіонавігаційна супутникова система, розроблена на замовлення Міністерства оборони СРСР. Розгортання системи у космосі зроблено за допомогою супутників «Глонасс-К» та «Глонасс-М» (ГЛОНАСС 2-го покоління).
Основою системи є 24 супутники, що обертаються над поверхнею Землі в трьох орбітальних площинах. Координати визначаються за принципом, узятим за аналогією американської системи глобального позиціонування GPS. Як альтернатива обом системам у Європі розробляється система Галілео.
Супутники системи ГЛОНАСС стало передають радіовипромінювання двох типів: навігаційний сигнал СТ діапазону L1 (1,6 ГГц) та навігаційний сигнал високої точності ВТ діапазонів L1 и L2 (1,2 ГГц).
Історія
Початок робіт по створенню системи ГЛОНАСС був покладений у грудні 1976 року.
Перший космічний апарат системи («Космос-1413») було запущено 12 жовтня 1982 року[1].
У листопаді 2009 року було оголошено, що Науково-дослідний інститут радіотехнічних вимірювань (Харків) та Російський науково-дослідний інститут космічного приладобудування (Москва) створять спільне підприємство. Партнери створять систему супутникової навігації заради обслуговування споживачів на території двох країн[2].
Навігація
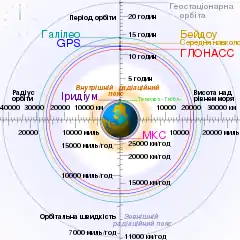
Супутники ГЛОНАСС перебувають на орбіті середньою висотою 19 400 км[3] із нахилом 64,8° і періодом 11 годин 15 хвилин. Така орбіта більше придатна для застосування на високих широтах (північний і південний полярний регіон), де сигнал NAVSTAR приймається погано. Група супутників розгорнута в трьох орбітальних площинах, із 8 рівномірно розподіленими супутниками в кожній. Для створення глобального покриття необхідно 24 супутники, а для покриття території Росії необхідно 18 супутників. Сигнали передаються з направленістю в 38° з використанням правої кругової поляризації, із потужністю 316—500 Вт (EIRP 25-27 dBW).
Для визначення координат приймач повинен отримувати сигнал щонайменше від чотирьох супутників і розрахувати відстань до них. При використанні трьох супутників визначення координат ускладнене через помилки, що зумовлені неточністю годинника приймача[4][5].
FDMA-сигнали
Використовуються два типи сигналів: відкриті зі звичайною точністю і захищені з підвищеною точністю.
Сигнали передаються з використанням методу розширення спектру в прямій послідовності (DSSS) і модуляцією через двійкову фазову маніпуляцію (BPSK). Всі супутники використовують одну і ту саму псевдовипадкову кодову послідовність для передачі відкритих сигналів, однак кожен супутник здійснює передачу на різній частоті, з використанням 15-канального розділення частот (FDMA). Сигнал в діапазоні L1 перебуває на центральній частоті 1602 МГц, а частота передачі супутників визначається за формулою 1602 МГц + n × 0,5625 МГц, де n це номер частотного каналу (n=−7,−6,−5,…0,…,6, раніше n=0,…,13). Сигнал в діапазоні L2 знаходиться на центральній частоті 1246 МГц, а частота передачі кожного сигналу визначається за формулою 1246 МГц + n×0.4375 МГц. Протилежно розташовані апарати не можуть бути видними з поверхні Землі одночасно, тому 15 радіоканалів достатньо для 24 супутників.
Відкритий сигнал генерується шляхом додавання за модулем 2 трьох кодових послідовностей: псевдовипадкового дальномірного коду зі швидкістю 511 кбіт/c, навігаційного повідомлення зі швидкістю 50 біт/c, і 100 Гц манчестер-коду. Всі ці послідовності генеруються одним тактовим генератором. Псевдовипадковий код генерується 9-кроковим регістром зсуву з періодом 1 мс.
Навігаційне повідомлення відкритого сигналу транслюється неперервно зі швидкістю 50 біт/c. Суперкадр довжиною 7500 біт потребує 150 секунд (2,5 хвилини) для передачі повного повідомлення і складається з 5-ти кадрів по 1500 біт (30 секунд). Кожен кадр (фрейм) складається із 15 рядків по 100 біт (2 секунди на передачу кожного рядка), 85 біт (1,7 секунди) даних и контрольних сум і 15 біт (0,3 секунди) на маркер часу. Рядки 1-4 містять безпосередню інформацію про супутник і передаються заново в кожному кадрі; дані містять ефемериди, зсув тактових генераторів частот, а також відомості про стан супутника. Рядки 5-15 містять альманах; в кадрах I—IV передаються дані на 5 супутників в кожному, а в кадрі V — про решту чотири супутника.
Ефемериди оновлюються кожні 30 хвилин з використанням вимірювань наземного контрольного сегменту; використовується система координат ECEF (Earth Centered, Earth Fixed) для розташування і швидкості, а також передаються параметри прискорення під дією Сонця й Місяця. Альманах використовує модифіковані елементи орбіти Кеплера і оновлюється щоденно.
Захищений сигнал підвищеної точності призначається для авторизованих користувачів, таких як Збройні сили Російської Федерації. Сигнал передається у квадратурній модуляції з відкритим сигналом на тих самих частотах, але його псевдовипадковий код має в десять радів більшу швидкість передачі, що збільшує точність визначення координат. Хоча захищений сигнал не зашифровано, формат його псевдовипадкового коду й навігаційних повідомлень є секретним. За даними дослідників, навігаційне повідомлення захищеного сигналу L1 передається зі швидкістю 50 біт/c без використання манчестер-кода, суперкадр складається з 72 кадрів довжиною 500 біт, де кожен кадр містить 5 рядків довжиною 100 біт і потребує 10 секунд на передачу. Таким чином, загальне навігаційне повідомлення має довжину 36 000 біт і потребує для передачі 720 секунд (12 хвилин); передбачається, що додаткова інформація використовується для підвищення точності параметрів сонячно-місячних прискорень і корекції частоти тактових генераторів.
CDMA-сигнали
Із середини 2000-х років готується введення сигналів ГЛОНАСС з кодовим розділенням[6][7][8][9][10][11].
Формат і частоти нових сигналів остаточно не визначені. За попередніми даними розробників, в супутниках Глонасс-К2 буде два відкритих і два зашифрованих сигнали в форматі CDMA.
Відкритий сигнал L3OC передається на частоті 1202,025 МГц[12][13], використовує двійкову фазову маніпуляцію BPSK(10) для пілотного і інформаційного сигналів; псевдовипадковий далекомірний код транслюється з частотою 10,23 мільйонів імпульсів в секунду і модулюється на несучій частоті через квадратурну фазову маніпуляцію QPSK, при цьому пілотний і інформаційний сигнали рознесені по квадратурах модуляції: інформаційний сигнал перебуває в фазі, а пілотний — у квадратурі. Інформаційний сигнал додатково модульований 5-бітним кодом Баркера, а пілотний сигнал — 10-бітним кодом Ньюмана-Хоффмана[14].
Відкритий сигнал L1OC і захищений сигнал L1SC передаються на частоті 1600,995 МГц, а відкритий сигнал L2OC і захищений сигнал L2SC — на частоті 1248,06 МГц, перекриваючи діапазон сигналів формату FDMA. Відкриті сигнали L1OC і L2OC використовують Мультиплексування з поділом за часом для передавання пілотного і інформаційного сигналів; використовується модуляція BPSK(1) для інформаційного і BOC(1,1) для пілотного сигналів. Захищені широкосмугові сигнали L1SC і L2SC використовують модуляцію BOC(5,2,5) для пілотного і інформаційного сигналів, і передаються в квадратурі по відношенню до відкритих сигналів; при такому типі модуляції пік потужності зміщується на кінці частотного діапазону і захищений сигнал не заважає відкритому вузькосмуговому сигналу, що передається на несущій частоті [11][14].
Модуляція BOC (binary offset carrier, двійковий зсув носія) застосовується в сигналах систем Galileo і модернізованій GPS; в сигналах GLONASS і стандартній GPS застосовується Двійкова фазова маніпуляція (BPSK), однак і BPSK, і QPSK є частковими випадками квадратурної амплітудної модуляції (QAM-2 і QAM-4).
Навігаційне повідомлення сигналу L3OC передається зі швидкістю 100 біт/c. Один кадр розміром 1500 біт передається за 15 секунд і містить 5 текстових рядків, кожен довжиною 300 біт (3 секунди); у кожному кадрі містяться ефемериди поточного супутника і частина системного альманаху для трьох супутників. Суперкадр складається з 8 кадрів і має розмір 12000 біт, таким чином отримання альманаху для всіх 24-х супутників потребує 120 секунд (2 хвилини); у майбутньому суперкадр може бути розширений до 10 кадрів або 15000 біт (150 секунд або 2,5 хвилини на передавання) для підтримки роботи 30 супутників. У кожному рядку передається системний час; секунда координації UTC враховується подовженням (із заповненням нулями) або скороченням останнього рядка місяця на довжину в одну секунду (100 біт), скорочені рядки відкидаються апаратурою приймача[15].
| Модернізація системи «Глонасс» | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Серія космічного апарату | Рік розгортання | Стан | Стабільність частоти | Сигнали FDMA | Сигнали CDMA | Сумісні сигнали CDMA | |||||
| 1602 + n×0.5625 МГц | 1246 + n×0.4375 МГц | 1600.995 МГц | 1248.06 МГц | 1202.025 МГц | 1575.42 МГц | 1207.14 МГц | 1176.45 МГц | ||||
| «Глонасс» | 1982—2005 | Виведено із експлуатації | 5×10−13 | L1OF, L1SF | L2SF | ||||||
| «Глонасс-М» | 2003—2016 | В експлуатації | 1×10−13 | L1OF, L1SF | L2OF, L2SF | L3OС† | |||||
| «Глонасс-К1» | 2011, 2014 | Льотно-конструкторські випробування | 5×10−14-1×10-13 | L1OF, L1SF | L2OF, L2SF | L3OС | |||||
| «Глонасс-К2» | 2015—2024 | В розробці | 5×10−14 | L1OF, L1SF | L2OF, L2SF | L1OC, L1SC | L2OC, L2SC | L3OC | |||
| «Глонасс-КМ» | 2025 | На стадії вивчення | L1OF, L1SF | L2OF, L2SF | L1OC, L1SC | L2OC, L2SC | L3OC, L3SC | L1OCM | L3OCM | L5OCM | |
| «O»: відкритий сигнал стандартної точності / «S»: шифрований сигнал високої точності «F»: частотне розділення каналів (FDMA) / «С»: кодове розділення каналів (CDMA) n = −7,−6,−5,…,0,…,5,6. †Супутники Глонасс-М оснащуються передавачами сигналу L3OC з 2014 року. | |||||||||||
Точність
На сьогодні точність визначення координат системою ГЛОНАСС дещо гірша від аналогічних показників GPS[16][17][18].
Згідно з даними СДКМ[19] на 18 вересня 2012 року похибки навігаційних показників ГЛОНАСС (при p = 0,95) по довготі і широті становили 3—6 м при використанні в середньому 7—8 супутників (залежно від точки прийому сигналів). Тоді як похибки GPS становили 2—4 м при використанні в середньому 6—11 супутників (залежно від точки прийому сигналів).
При використанні обох навігаційних систем досягається суттєве підвищення точності. Європейський проект EGNOS, який використовує сигнали з обох систем[20], дозволяє отримати точність визначення координат на території Європи на рівні 1,5—3 метрів[21].
Проблеми функціонування
2 квітня 2014 року у системі ГЛОНАСС стався найзначніший збій у роботі за всю історію існування космічного угруповання. Проблеми почалися приблизно о першій годині (за московським часом) 2 квітня і тривали приблизно до полудня. За даними сайту ЦНДІМАШ, у зазначений відрізок часу всі 24 супутника системи ГЛОНАСС видавали некоректні дані, тобто система практично не працювала[22].
Після виправлення помилок (2015 року) систему ГЛОНАСС, за офіційними даними, здали в користування та у власність Міноборони РФ[23].
У середині лютого 2016 року стало відомо, що система ГЛОНАСС перестала функціонувати на деякий час. Три супутника вийшли з ладу й на орбіті залишилось 21, тоді як для роботи ГЛОНАСС потрібно не менше 24 супутників. Супутник «Глонасс-738» був ушкоджений у результаті вибуху (скоріше за все — акумулятора); «Глонасс-737» було виведено з експлуатації через розрядження акумуляторної батареї; «Глонасс-736» втратив необхідну позицію через те, що у нього помилково було включено двигуни[24].
З початку листопада 2017 року усі 24 супутники функціонують в штатному режимі[25].
Примітки
- 12 октября 1982 года - запуск на орбиту первого космического аппарата Глонасс. 12.10.2016. Архів оригіналу за 12 травня 2021. Процитовано 17.05.2017.
- Росія взяла Україну в ГЛОНАСС
- Современные ГНСС. Основные характеристики систем навигации. Информационный портал системы ГЛОНАСС. Архів оригіналу за 20 грудня 2014. Процитовано 1 грудня 2014.
- Основні елементи супутникової системи навігації Архівовано 30 грудня 2014 у Wayback Machine.: «Мінімальна кількість видимих супутників для визначення місцезнаходження користувача» // Інформаційно-аналітичний центр ГЛОНАСС
- Теоретичний курс підготовки капітанів, старших помічників капітана і вахтових помічників капітана. Частина 1. Судноводіння. // Морський навчальний центр NOVIKONTAS, стор. 84-85
- GLONASS Status and Progress Архівовано 14 червня 2011 у Wayback Machine., S.G.Revnivykh. «L1CR and L5R CDMA interoperable with GPS and Galileo». 47th CGSIC Meeting, September 2007
- GLONASS Status and Development, G.Stupak, 5th ICG Meeting. October 2010
- Russia Reveals CDMA Signal Plan as GLONASS Nears Full Operational Capacity Архівовано 26 листопада 2010 у Wayback Machine.. Inside GNSS. December 2010
- GLONASS Status and Modernization. Ekaterina Oleynik, Sergey Revnivykh, 51th CGSIG Meeting, September 2011
- GLONASS Status and Modernization. Sergey Revnivykh. 6th ICG Meeting, September 2011
- GLONASS Status and Modernization. Sergey Revnivykh. 7th ICG Meeting, November 2012
- http://www.insidegnss.com/auto/julyaug11-Dumas.pdf
- Инновация: ГЛОНАСС. Стратегии развития // Роскосмос, 2011
- GLONASS Modernization Yuri Urlichich, Valery Subbotin, Grigory Stupak, Vyacheslav Dvorkin, Alexander Povalyaev, Sergey Karutin, and Rudolf Bakitko, Russian Space Systems. GPS World, November 2011
- GLONASS: Developing Strategies for the Future. Yuri Urlichich, Valeriy Subbotin, Grigory Stupak, Vyacheslav Dvorkin, Alexander Povalyaev, and Sergey Karutin. GPS World, November 2011
- ГЛОНАСС. Архів оригіналу за 13 квітня 2014. Процитовано 13 квітня 2014.
- Почему показания GPS/ГЛОНАСС мониторинга отличаются от данных одометров. Архів оригіналу за 13 квітня 2014. Процитовано 13 квітня 2014.
- Глобальная Навигационная Спутниковая Система (ГЛОНАСС, GLONASS). Архів оригіналу за 13 квітня 2014. Процитовано 13 квітня 2014.
- Російська система диференціальної корекції і моніторингу (СДКМ)
- http://www.esa.int/esaNA/GGGQI950NDC_egnos_0.html «The master control centres determine the accuracy of GPS and GLONASS signals received at each station»
- http://www.esa.int/esaNA/SEMKMQWO4HD_egnos_0.html «By correcting GPS signals, EGNOS gives an accuracy of down to 1.5 metres.»
- Роскосмос ищет причины сбоя ГЛОНАСС
- Навігаційні системи
- Роскосмос обещает восстановить ГЛОНАСС к середине марта. Известия. 18.02.2016. Процитовано 17.05.2017.
- Інформаційно-аналітичний центр координатно-частотного та навігаційного забезпечення