Гіперзвуковий прямоточний повітряно-реактивний двигун
«Гіперзвуковий двигун» ГППРД (англ. Supersonic Combustion RAMJET — scramjet) — варіант прямоточного повітряно-реактивного двигуна (ППРД), який відрізняється від звичайного надзвуковим згорянням. На більших швидкостях задля збереження ефективності двигуна необхідно уникати гальмування повітря, що надходить, і спалювати паливо в надзвуковому повітряному потоці.


Опис гіперзвукового ППРД
Верхня межа швидкості гіперзвукового ППРД (ГППРД) без використання додаткового окислювача оцінюється у М=12—24. Дослідження у рамках проекту «X-30» фірми Роквел у 80-х роках XX-го століття встановили найбільше значення швидкості для роботи ГППРД, відповідне М=17 у зв'язку з забезпеченням умов для згоряння у двигуні. Для порівняння, найбільш швидкий пілотований літак з надзвуковим прямоточним повітряно-реактивним двигуном (НППРД) «SR-71» (англ. Black Bird, «Чорний дрізд») компанії Локхід досягає швидкості не вище М=3,4 через гальмування повітряного потоку у двигуні до дозвукової швидкості. Окрім того, тому що ГППРД використовує не окислювач, транспортуємий разом з апаратом, а атмосферне повітря, він має набагато більш високий показник ефективності двигуна — питомим імпульсом у порівнянні з будь-яким з наявних ракетних двигунів.
Як і надзвуковий ППРД, гіперзвуковий ППРД складається з повітропроводу зі звуженням, в якому поступаюче повітря зазнає стиснення завдяки високій швидкості апарату; камери згоряння, де відбувається спалювання палива; сопла, через яке відбувається вихід вихлопного газу зі швидкістю, більшою від швидкості повітря, що надходить, що й утворює тягу двигуна. Також, як і НППРД, ГППРД має мало рухомих частин або взагалі їх позбавлений. Зокрема, у ньому відсутня високошвидкісна турбіна, яка наявна у турбореактивному двигуні (ТРД) та є одною з найкоштовніших частин такого двигуна, будучи при цьому потенційним джерелом проблем під час використання.
Для роботи гіперзвуковому ППРД необхідний проходячий крізь нього надзвуковий повітряний потік, тому, також як й надзвуковий ППРД, цей тип двигуна має мінімальну швидкість, за якої він може функціонувати, приблизно дорівнювану М=7—8[1]. Таким чином, апарату з ГППРД необхідний інший спосіб прискорення до швидкості, достатньої для роботи гіперзвукового двигуна. Гібридний надзвуковий/гіперзвуковий ППРД повинен мати ме́нше значення мінімальної робочої швидкості та деякі джерела вказують, що експериментальний гіперзвуковий літак «X-43» (Боїнг/НАСА) має саме такий двигун. останні випробування X-43 здійснювалися за допомогою ракетного прискорювача, який запускається з літака, який розганяв цей апарат до М=7,8.
Гіперзвукові апарати мають значні проблеми, пов'язані з їхньою вагою та складністю. Перспективність ГППРД активно обговорюється в основному з тієї причини, що багато з параметрів, які у кінцевому підсумку визначатимуть ефективність літака з таким двигуном, лишаються невизначеними. Це, зокрема, також пов'язано зі значними витратами на випробування таких апаратів. Такі добре фінансовані проекти, як X-30, були скасовані до створення експериментальних моделей. Для додаткової інформації див. також статтю «Гіперзвуковий літальний апарат».
Історія
Починаючи з Другої Світової війни витрачалися значні зусилля на дослідження у галузі досягнення великих швидкостей реактивними літаками та ракетопланами. У 1947 році експериментальний ракетний літак «X-1» виробництва компанії Bell Aircraft здійснив свій перший у історії надзвуковий політ та вже близько 1960 року почали з'являтися пропозиції та проекти щодо польотів з гіперзвуковими швидкостями. За винятком проектів таких ракетопланів, як «X-15», навмисно спроектованих для досягнення великих швидкостей, швидкості реактивних літаків лишалися у межах М=1—3.
У 50-х та 60-х створювалися різні експериментальні гіперзвукові ППРД, які випробовувалися на землі. Стосовно до цивільного авіатранспорту, основною метою ГППРД вважалося в більшій мірі зниження експлуатаційних витрат, ніж скорочення часу перельотів. Оскільки надзвукові реактивні двигуни споживають значну кількість палива, авіалінії віддавали перевагу дозвуковим широкофюзеляжним літакам, а не надзвуковим літакам (див. «Конкорд» та Ту-144). Прибутковість використання останніх була ледве помітна, а збитковість польотів Конкорду «Брутуш Эйрвейз» за час його експлуатації у середньому склала 40%[2] (без врахування субсидування польотів державою). Однією з основних рис військових літаків є досягнення найбільшої маневреності та прихованості, що суперечить аеродинаміці гіперзвукового польоту. У період 1986—1993 р. у США була здійснена серйозна спроба створення одноступеневої космічної системи «X-30» (фірма Роквелл, проект NASP, англ. National Aero-Space Plane) на базі ГППРД, але вона зазнала невдачі. Тим не менш, концепція гіперзвукового польоту не пішла зі сцени та менш масштабні дослідження тривали протягом останніх двох десятиліть. Наприклад, 15 червня 2007 року Агенція передових оборонних дослідницьких проектів (DARPA, англ. Defense Advanced Research Project Agency) США та Міністерство Оборони (МО) Австралії повідомили про успішний гіперзвуковий політ зі швидкістю М=10 з використанням ракетного прискорювача для отримання потрібної швидкості на ракетному полігоні Ву́мера у центральній Австралії. У США Пентагон та НАСА сформували Національну Гіперзвукову Стратегію (англ. National Hypersonics Strategy) з метою дослідити спектр можливостей гіперзвукового польоту. Інші країни, такі як Велика Британія, Австралія, Франція, Росія та Індія також мають свої програми досліджень. Також слід відзначити, що на 2009 рік не було здійснено жодного «робочого» апарату з гіперзвуковим ППРД, усі наявні та дослідницькі моделі створюються у рамках експериментів з їх дослідження.
В Росії розробкою подібних систем займається Центральний інститут авіаційного моторобудування імені П. І. Баранова, розташований у м. Москві та Литкаріно. У 1970-х роках почалися роботи зі створення ГППРД та гіперзвукової літаючої лабораторії (ГЛЛ) «Холод»[3] на базі ракети ЗРК «С-200», на якій було проведено унікальне льотне випробування у Казахстані ГППРД на швидкості M=5,7. На даний час інститут веде роботи по перспективній ГЛЛ «Игла» («Исследовательский Гиперзвуковой летательный аппарат») «Холод-2» с НППРД[4].
Проблема ускладнюється обнародуванням, найчастіше лише частковим, раніше засекречених матеріалів щодо експериментів, які зберігаються у секреті, але за якими тим не менш робляться заяви про отримання працездатних варіантів двигуна. Окрім того виникають складності з підтвердженням достовірності таких повідомлень та, зокрема, факту надзвукового згоряння та отримання потрібної тяги. Таким чином, принаймні чотири групи, у які входять кілька країн та організацій, мають законі підґрунтя стверджувати, що були «першими».
Порівняльний опис
ГППРД являє собою тип двигуна, призначений для роботи на великих швидкостях, які характерніші для ракет, ніж для літаків. Основна відмінність апарату з таким двигуном від ракети полягає у тому, що він не несе на собі окислювач для роботи двигуна, використовуючи з цією метою атмосферне повітря. Звичайні літаки з прямоточними повітряно-реактивними (ППРД), турбореактивними (ТРД), двоконтурними турбовентиляторними (ДТВД) та турбогвинтовими (ТВД) типами двигунів мають таку ж властивість використовувати атмосферне повітря, але їхнє застосування обмежене дозвуковими та надзвуковими швидкостями.
Турбінні двигуни ефективні для використання на дозвукових та надзвукових швидкостях, але швидко становятся некорисними зі зростанням швидкості М>2. Це пояснюється тим, що потік повітря, який надходить у компресор двигуна, має більшу швидкість, а через його наступне гальмування починають зростати температура та аеродинамічний опір. Високі температури небажані, тому що вони можуть викликати розплавлення та руйнування двигуна та це також знижує його ефективність через більшу температуру суміші повітря та палива, яка потрапляє у камеру згоряння (див. закон Гесса). Зі зростанням швидкості доступна для використання енергія зменшується як квадрат швидкості у числах Маха. Найбільша робоча швидкість двигуна може бути збільшена шляхом охолодження потрапляючого у повітрозабірник газу та шляхом комбінування схеми з використанням форсажних камер та гібридних ТРД/ППРД.
Літаки з ППРД легше конструювати з тієї причини, що такий двигун спричиняє менший опір повітрю (тертя) та має менше частин, які повинні функціонувати при високій температурі. Завдяки меншому тертю ППРД може забезпечити більші швидкості, але через необхідність поступу великих об'ємів повітря у повітропровід без допомоги компресора, швидкість такого літака не може бути менше 600 км/г. З другого боку, схема роботи ППРД передбачає гальмування повітря, що надходить, до дозвукової швидкості для його стиснення, змішування з паливом та наступне спалювання. Цей процес призводить до зростання проблем разом зі зростанням швидкості апарату — ударна хвиля під час гальмування газу, поступаючого на надзвуковій швидкості, призводить до зростання тертя, яке, насамперед, стає неможливо компенсувати тягою двигуна. Також, як й у випадку з турбінними двигунами, цей процес супроводжується зростанням температури, що знижує ефект від спалення палива. Задля збереження продуктивності двигуна необхідно задіяти заходи зі зниження у ньому тертя та температури. У залежності від успішності таких конструкторских рішень, а також від типу використаного палива, верхня межа швидкості літака з НППРД складає М=4—8.
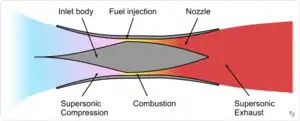
Найпростіший варіант гіперзвукового ППРД виглядає як пара воронок, які з'єднані одне з одним вузькими отворами. Перша воронка служить повітрозабірником, в найбільш вузькій частині відбувається стиснення повітря, додавання до нього палива та спалювання суміші, що ще більш підіймає температуру та тиск газу, а друга воронка утворює сопло, через яке відбувається розширення продуктів згоряння з утворенням тяги. Така схема дозволяє ГППРД виключити сильне тертя та низьку ефективність згоряння під час його використання на швидкостях М>8, що досягається шляхом збереження практично незмінної швидкості повітря, що проходить через увесь двигун. Оскільки у порівнянні з НППРД газ, що проходить у гіперзвуковому ППРД менш загальмовується, він менше розігрівається й згоряння відбувається більш ефективно з більшим виділенням корисної енергії (див. закон Гесса). Основна складність такої схеми полягає у тому, що паливо повинно бути змішаним та спаленим за вкрай короткий час та у тому, що будь-яка помилка у геометрії двигуна призведе до більшого тертя. Розташування ГППРД під тілом апарату призначено для конвертування сили тертя у підйомну силу та створення додаткової підйомної сили, використовуючи вихлоп двигуна. Це утворює підйомну силу під час гіперзвукового польоту та визначає зовнішній вигляд таких літаків.
Теорія
Будь-який гіперзвуковий ППРД має інжектори палива, камеру згоряння, сопло та повітрозабірник, який стискує потік повітря, що приходить. Інколи у двигун також включають стабілізатор полум'я (англ. flame holder), хоча температура гальмування потоку у області фокусування хвиль щільності достатньо висока для самодостатнього горіння. Інші двигуни використовують пірофорні добавки, такі як сілани, з метою обходу проблем зі стійкістю згоряння. Часто використовується ізолятор між повітрозабірником та камерою згоряння для подовження функціонування двигуна.
_Mach_7_computational_fluid_dynamic_(CFD).jpg.webp)
У випадку ГППРД кінетична енергія повітря, поступаючого у двигун, є великою у порівнянні з виділяємою енергією під час екзотермічній взаємодії палива та окислювача з повітря. При швидкості М=25 тепло, виділене під час згоряння палива, становить близько 10% від загальної ентальпії потоку. Поза залежністю від застосованого палива, кінетична енергія повітря та теоретична корисна енергія тепла від згоряння будуть дорівнювати одне одному приблизно при швидкості М=8. Таким чином, конструкція ГППРД переслідує насамперед мету зменшення тертя, а не збільшення тяги.
Висока швидкість робить складним керування потоком всередині камери згоряння (КЗ). Тому що повітряний потік, що надходить, є надзвуковим, нема зворотного розповсюдження процесів, які відбуваються у КЗ. це не дозволяє регулювати тягу зміною розміру входу у сопло (КЗ). Більше того, увесь надходячий із надзвуковою швидкістю через камеру згоряння газ повинен з мінімальним тертям змішатися з паливом та мати достатньо часу для згоряння з метою наступного розширення у соплі та породження тяги. Це накладає сильні обмеження на тиск та температуру потоку та вимагає, щоб вприскування та змішування палива були надзвичайно ефективні. Робочі значення тиску лежать у діапазоні 20—200 КПа (0,2—2 атм) та при цьому під тиском розуміється:

де q — динамічний тиск; ρ (ро) — щільність; v — швидкість. Для того, щоб підтримувати швидкість згоряння постійною, тиск та температура у двигуні також повинні бути постійними. Це є проблематичним, тому що системи керування повітряним потоком у такому двигуні неможливі, що означає обмеження висоти та швидкості або відповідного динамічного тиску, за яких конкретний ГППРД призначений функціонувати. Таким чином, для виконання цієї вимоги такий апарат повинен набирати висоту під час набору швидкості. Оптимальна траєкторія набору висоти та спуску зветься траєкторією постійного динамічного тиску (ТПДТ, англ. constant dynamic pressure path). Вважається, що апарати з ГППРД можуть використовуватися до висоти 75 км[5].
Порядок вприскування палива також є потенційно складною проблемою. Одна з можливих схем циркуляції палива виглядає наступним чином: паливо стискається до 100 атм турбонасосом, нагрівається фюзеляжем, проходить крізь турбину та потім остання частина тиску використовується інжекторами для вприскування палива зі швидкістю, більшою ніж швидкість повітряного потоку, що проходить, у основі камери згоряння. Потоки палива утворюють сіткоподібну структуру у потоці повітря, що проходить. Висока турбулентність з більшою ніж швидкість палива призводить до подальшого перемішування. При цьому, чим складніші молекули палива, наприклад, як у керосина, тим довше повинен бути ГППРД для завершения згоряння.
Мінімальне число Маха, при якому ГППРД може працювати, обмежено тим, що стиснений потік повинен бути достатньо гарячим для горіння палива та мати тиск, достатньо високий для завершення реакції до того, як повітряна суміш покине сопло. для збереження належності двигуна до класу ГППРД, збереження його властивостей та стійкої роботи, потік газу повинен зберігати надзвукову швидкість на всіх ділянках свого шляху у двигуні. Ступінь стиснення напряму пов'язаний зі ступенем гальмування потоку та визначає нижню межу використання. Якщо газ у двигуні гальмується до швидкості нижчою М=1, то двигун «глухне», породжуючи ударі хвилі, під час експериментів добре помітні неозброєним оком. Раптове сповільнення потоку повітря у двигуні може призвести до прискорення згоряння у КЗ, що здатне викликати руйнування ГППРД. Окрім стиснення, на нижню межу швидкості впливає також збільшення швидкості звуку у газі зі зростанням температури. На 2009 рік вважається, що нижня межа швидкості використання «чистого» гіперзвукового ППРД складає М=6—8[6]. Існують проекти конструкцій гібридних НППРД/ГППРД, які передбачають трансформацію надзвукового двигуна у гіперзвуковий на швидкостях М=3—6[7] та мають нижче значення граничної швидкості, використовуючи дозвуковое згоряння на зразок НППРД.
Висока вартість льотних випробувань та неможливість повноцінних наземних стримує розвиток гіперзвукових літаків. Наземні випробування в основному зосереджені на частковому моделюванні умов польоту та здійснювалися на кріогенних установках, газодинамічних установках на базі ракетних двигунів, ударних тонелях та плазмогенераторах, але усі вони лише приблизно моделюють реальний політ[8][9]. Тільки в останній час в обчислювальній гидрогазодинаміці (ОГГ) було накопичено достатньо експериментальних даних для реалістичного комп'ютерного моделювання з метою вирішення проблем роботи апаратів с ГППРД, а саме для моделювання приграничного шару повітря, змішування палива з потоком повітря; двохфазної течії потоку; відриву (відокремлення) потоку; аеротермодинаміки реального газу та тим не менш, ця галузь все ще лишається маловивченою галуззю ОГГ. Окрім того, моделювання кінетично обмеженого згоряння за участю таких швидкореагуючих палив, як водень, вимагає значних обчислювальних ресурсів. Як правило, використовуються обмежені моделі з пошуком чисельних рішень «жорстких систем» диференційних рівнянь, для яких необхідний малий крок інтегрування й тому треба багато машинного часу.
Більшість експериментів з гіперзвуковими ППРД лишаються засекреченими. Кілька груп, включно ВМС США з двигуном «SCRAM» 1968-1974 рр, Боїнг з апаратом X-43 програма «Hyper-X» наполягають на успішному виконанні польотів з використанням ГППРД.
Остаточний варіант дизайну гіперзвукого ППРД найшвидше всього буде гібридним двигуном з розширеним діапазоном робочих швидкостей:
- двохрежимний СППРД/ГППРД, з можливістю дозвукового та надзвукового згоряння («СГД»);
- ГППРД, який використовується на додаток ракетного двигуна з можливістю додавання у повітрозабірник додаткового окислювача (ГРД).
ГРД повинні мати набагато більші діапазони дозволених динамічного тиску та швидкості.
Переваги та недоліки ГППРД
Спеціальне охолодження та матеріали
На відміну від звичайної ракети, яка швидко та практично вертикально пролітає крізь атмосферу, або літака, який літає на набагато ме́ншій швидкості, гіперзвуковий апарат повинен дотримуватися траєкторії, яка забезпечує режим роботи ГППРД, залишаючись у атмосфері з гіперзвуковою швидкістю. Апарат з ГППРД має у ліпшому випадку посереднє відношення тяги до ваги апарату, тому його прискорення мале у порівнянні з ракетами-носіями. Таким чином, час перебування у атмосфері такої космічної системи, повинен бути значним та становити від 15 до 30 хв. За аналогією з теплозахистом для аеродинамічного гальмування Спейс Шаттлу під час входження в атмосферу, теплозахист такої системи повинен бути також значним. Загальний час апарату у атмосфері при гіперзвукових швидкостях є триваліший у порівнянні з одноразовою капсулою, що повертається, але менш тривалий у порівнянні зі космічним човником.
Нові матеріали пропонують добре охолодження та теплозахист при високих температурах, але, як правило, відносяться до абляційних матеріалів, які поступово втрачаються під час використання, забираючи із собою тепло. Таким чином, дослідження в основному фокусуються на активному охолодженні корпусу, в яких хладагент примусово циркулює у «теплонапружених» частинах корпусу, відводячи підвищену температуру від корпусу та запобігаючи його руйнуванню. Як правило, як теплоносій пропонується використовувати паливо, в багато чому аналогічно тому, як у сучасних ракетних двигунах використовують паливо або окислювач при охолодженні сопла та камери згоряння (КЗ). Додавання будь-якої складної охолоджуючої системи призводить до збільшення ваги та зниження ефективності системи в цілому. Таким чином, необхідність активної системи охолодження є стримуючим фактором, який знижує ефективність та перспективність застосування ГППРД.
Вага двигуна та ефективність
Продуктивність космічної системи в основному пов'язана з її стартовою вагою. Як правило, апарат проектується з метою зробити найбільшим радіус дії (), висоту орбіти () або долю маси корисного вантажу () з використанням конкретного двигуна та палива. Це призводить до компромісів між ефективністю двигуна, тобто масою палива, та складністю двигуна, тобто його сухою масою, що може бути виражено наступним чином:


- ,

де — доля маси без палива, яка має в своєму складі усю конструкцію, включаючи паливні баки та двигуни; — доля маси палива та окислювача, якщо останній використовується, також маса тих матеріалів, які будуть використані протягом польоту та призначені виключно для здійснення цього польоту; — початкове співвідношення мас, яке є зворотною величиною до постачаємої за призначенням частки корисного навантаження (КН). Використання ГППРД збільшує масу двигуна у порівнянні з ракетою та зменшує частку палива . тому важко вирішити, яка з використовуваних систем буде мати перевагу та дасть менше значення , що означає збільшення корисного навантаження при тій самій стартовій масі. Прибічники ГППРД стверджують, що зменшення стартової маси за рахунок палива складатиме 30%, а збільшення за рахунок додавання гіперзвукового ППРД складатиме 10%. Упевненість при обчисленні будь-якої маси у гіпотетичному апараті така велика, що незначні зміни у прогнозах ефективності або маси ГППРД можуть переважити шальки терезів частки КН в одну або іншу сторону. Окрім того, необхідно враховувати опір повітря або тертя зміненої конфігурації. тертя апарату може розглядатися як сума тертя самого апарату () та тертя встановленого ГППРД (). Тертя установки традиційно визначається из тертя пілонів та потоку у самому двигуні, яке може бути записано у вигляді знижуючого тягу коефіцієнта:







- ,

де — множник, який враховує втрати на опір повітря та — тяга двигуна без врахування тертя. Якщо ГППРД інтегрований у аеродинамічне тіло апарату, можна вважати, що тертя двигуна () є різницею від тертя базової конфігурації апарату. Загальна ефективність двигуна може бути представлена у вигляді значення у інтервалі від 0 до 1 () в терминах питомого імпульсу (УИ):




- ,

Де — прискорення вільного падіння на земної поверхні; — швидкість апарату; — ПІ; — температура горіння палива; — результуюча тяга та — доступна хімічна енергія. ПІ часто використовується як показник ефективності ракет, тому що у випадку, наприклад, РРД існує прямий зв'язок між питомим імпульсом, питомим споживанням палива та швидкістю витоку вихлопних газів. Звичайно ця величина (ПІ) в меншій мірі використовується для двигунів на літаках та тут варто відзначити також, що у цьому випадку та є функціями від поточної швидкості апарата. ПІ ракетного двигуна не залежить від швидкості, але залежить від висоти та досягає найбільших значень у вакуумі, де має максимальне значення у випадку киснево-водневих РРД, становлячи на поверхні 360 с, а у вакуумі 450 с (см. SSME, РД-0120). ПІ ГППРД має зворотну залежність від висоти та швидкості, досягаючи максимального значення при мінімальній швидкості, складаючи 1200 с, яке поступово зменшується зі зростанням швидкості, хоча ці оцінки значно різняться у літературі. У простому випадку одноступеневого апарату доля маси палива може бути виражена наступним чином:






- ,

яка може бути виражена у випадку одноступеневої космічної системи наступним чином:

або у випадку польоту літака з постійною швидкістю та висотою:
- ,

де — радіус дії, який може бути виражений за формулою у термінах радіуса Бреге́:
- , де радіус Бреге́ — :


та — коефіцієнт підйомної сили та — коефіцієнт аеродинамічного опору (більш докладно — англ. Drag coefficient). Остання достатньо проста формула[10] допускає реалізацію одноступеневої космічної системи.


Простота конструкції
Гіперзвукові літаки мають небагато рухомих частин, або ж зовсім їх позбавлені. Більшість складових частин являють собою поверхні, що безперервно переходять одна в одну. З простими паливними насосами та стартовим апаратом у вигляді самого літака, розробка апарату з ГППРД має тенденцію бути менш матеріалоємким та простішим на етапі конструювання, у порівнянні з іншими типами космічних систем.
Необхідність додаткової рушійної системи
Гіперзвуковий літак не може створити достатньо тяги до тих пір, поки не буде розігнаний до швидкості М≈5, хоча в залежності від конструкции, як зазначалося вище, можливий варіант гібридного НППРД/ГППРД, який може працювати на меншій швидкості. тим не менше, літак з горизонтальним злетом повинен бути оснащений додатковими ТРД або ракетними РРД для злету та початкового набору висоти та розгону. Також необхідно буде паливо для цих двигунів з усіма необхідними їм системами. Тому що варіант с важкими ТРД не зможе розігнатися до швидкості М>3, інший спосіб прискорення повинен бути обраний в цьому діапазоні швидкостей, а саме надзвукові НППРД або ракетні РРД. Вони також повинні будуть мати своє паливо та системи. Замість цього для початковій стадии польоту існують пропозиції використання першого ступеня у вигляді твердопаливного ракетного прискорювача, від якого позбавляються після набора швидкості.
Складність випробувань
На відміну від реактивних та ракетних рушійних систем, які можуть бути випробувані на землі, випробування гіперзвукових літаків можливе тільки в дорогих експериментальних установках або стартових комплексах, які ведуть до великих витрат при розробці. Експериментальні моделі після пусків зазвичай руйнуються під час або після завершення випробувань, що виключає їхнє повторне використання[джерело?].
Див. також
- Гіперзвуковий літальний апарат
- Швидкість звуку
- Число Маха
- Надзвукова швидкість
- Гіперзвукова швидкість
- Rockwell X-30
- X-43A
- X-51
- Одноступенева космічна система (англ.)
Примітки
- The Space Show: Broadcast 329 April 21st, 2005 Dr. Allan Paull. Архів оригіналу за 17 травня 2006. Процитовано 30 березня 2012.
- надзвуковий літак «Конкорд»: ЧаВо (англ.)
- ГЛЛ «Холод»
- ГЛЛ-ВК «Игла»
- гіперзвукові літаки (англ.)
- Paull, A.; Stalker, R.J., Mee, D.J. (1995). Експерименти з надзвуковим згорянням з ППРД у аеродинамічній трубі.. Jfm 296: 156-183. (англ.)
- Р. Т. Воланд, А. Х. Ослендер, М. К. Смарт, А. С. Рудаков, В. Л. Семенов, В. Копченов «Полеты гиперзвукового самолёта ЦИАМ/НАСА на скоростях 6.5 Махов», AIAA-99-4848. (англ.)
- Брошура центру у Ленглі випробувань гіперзвукових літаків в електродуговій плазменній установці. Архівовано 24 жовтня 2010 у Wayback Machine. (англ.)
- Брошюра центра в Ленгли испытаний гиперзвуковых самолетов на газодинамический установке с тепловой накачкой. Архівовано 24 жовтня 2010 у Wayback Machine. (англ.)
- гіперзвуковий літак (англ.)
Посилання
- Прямоточные реактивные двигатели
- Billig, FS «SCRAM-A Supersonic Combustion Ramjet Missile», AIAA paper 93-2329, 1993.
- HyShot — The University Of Queensland
- ABC's The Lab — The 2002 Hyshot launch.
- Latest results от 24 березня 2006 рока QinetiQ «HyShot».
- French Support Russian SCRAMJET Tests.
- A Burning Question. American Scientist.
- Hypersonic Scramjet Projectile Flys in Missile Test. SpaceDaily.
- NASA website for National Hypersonics Plan
- NASA's X-43A
- University of Queensland Centre for Hypersonics
- Variable geometry inlet design for scram jet engine. US Patent & Trademark Office. Архів оригіналу за 17 жовтня 2015. Процитовано October 7 2005.
- Airbreather's Burden. Why airbreathing isn't necessarily very good for reaching orbit. Архів оригіналу за 5 лютого 2012. Процитовано December 27 2005.
- Australian Scientists about to make the break through.
- The break through.
- BBC: Scramjet
- Scramjet combustor development-PDF file
