Дисбаланс
Дисбала́нс (фр. disbalance) — векторна величина, що характеризує незрівноваженість обертових мас. Незрівноваженість виникає при розбіжності осі обертання і головної осі інерції.
Базові поняття
Ротор — тіло, яке при обертанні утримується своїми несними поверхнями в опорах.
Центральні осі — система взаємно перпендикулярних осей, що беруть початок у центрі мас тіла або механічної системи.
Головна центральна вісь інерції — центральна вісь твердого тіла або механічної системи, відносно якої відцентрові моменти інерції тіла або системи дорівнюють нулю.
Ексцентриситет маси — відстань від центра мас до осі обертання.
Актуальність проблеми
При виготовленні обертових деталей (наприклад, валів, маховиків, зубчастих коліс, шківів, дисків турбін тощо, які у подальшому викладі об'єднані під назвою «ротор») внаслідок неоднорідності матеріалу, неточності обробки або монтажу можлива розбіжність центра мас деталей або складальних одиниць з віссю їх обертання або ж зміщення цієї осі відносно геометричної осі обертової деталі.
У результаті руху деталей зі змінними швидкостями на них діють сили інерції, що викликають появу додаткових динамічних навантажень на елементи з'єднань і на підшипникові опори. Ці навантаження є джерелом додаткових механічних напружень, що обумовлюють підвищений знос окремих деталей і складальних одиниць, їх коливання і вібрації. Якщо амплітуда цих коливань досить велика, що має місце в області частот, близькій до резонансу, то напруження, що виникають при цьому можуть спричинити руйнування найнавантаженіших деталей чи фундаменту, на якому встановлено машину.
Незрівноважені в механізмі сили інерції через фундамент передаються ґрунту чи промисловій будівлі і впливають на розташоване поруч технологічне обладнання. Внаслідок цього може порушитися технологічний процес та точність його перебігу. Тому всі деталі, що обертаються, особливо швидкохідних машин, в процесі складання необхідно піддавати зрівноваженню.
Види незрівноваженості

Незрівноваженість буває статичною, моментною, динамічною та квазістатичною[1].
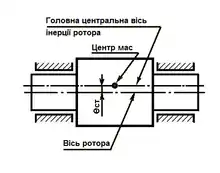
Статична незрівноваженість — незрівноваженість ротора, при якій вісь ротора і його головна центральна вісь інерції паралельні. Статична незрівноваженість повністю визначається головним вектором дисбалансів DСТ, або ексцентриситетом eСТ центру мас ротора, або відносним зсувом головної центральної осі інерції і його ротора, рівним значенню ексцентриситету центру його маси.
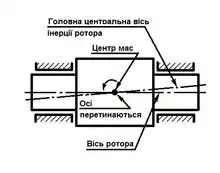
Моментна незрівноваженість — незрівноваженість ротора, при якій вісь ротора і його головна центральна вісь інерції перетинаються в центрі мас ротора. Моментна незрівноваженість повністю визначається: головним моментом дисбалансів ротора або двома рівними за значенням антипаралельними векторами дисбалансів, що лежать в двох довільних площинах, перпендикулярних до осі ротора.
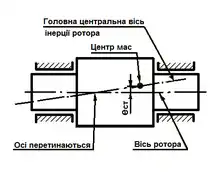
Динамічна незрівноваженість — незрівноваженість ротора, при якій вісь ротора і його головна центральна вісь інерції перетинаються не в центрі мас або мимобіжно перехрещуються. Динамічна неврівноваженість складається із статичної та моментної незрівноваженості. Динамічна незрівноваженість повністю визначається: головним вектором і головним моментом дисбалансів ротора або двома векторами дисбалансів, в загальному випадку різних за значенням і непаралельних, що лежать у двох довільних площинах, перпендикулярних до осі ротора (хрест дисбалансів).
Квазістатична незрівноваженість — динамічна незрівноваженість ротора, при якій вісь ротора і його головна центральна вісь інерції перетинаються не в центрі мас ротора.
Дисбаланс ротора
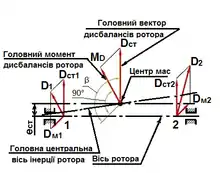
Усі дисбаланси ротора приводяться до двох векторів — головного вектора DСТ і головного моменту MD дисбалансів незалежно від причин, що викликали зміщення центру мас з осі обертання.
Головний вектор дисбалансів ротора (DСТ) — вектор, перпендикулярний до осі ротора, що проходить через центр його мас і дорівнює добутку маси на її ексцентриситет.
Головний момент дисбалансів ротора (MD) — момент, що дорівнює геометричній сумі моментів усіх дисбалансів ротора відносно його центра мас. Головний момент дисбалансів перпендикулярний до головної центральної осі інерції і осі ротора і обертається разом з ротором.
Дисбаланс — векторна величина, що дорівнює добутку незрівноваженої маси на її ексцентриситет в обраній площині. Ця площина може використовуватись для задання дисбалансу (площина приведення дисбалансу), коректування мас ротора (площина корекції), вимірювання дисбалансу (площина вимірювання дисбалансу). Дисбаланси у різних двох площинах вздовж осі даного ротора є різними, і їх кути і значення можуть бути встановлені розрахунком, а також за допомогою балансувального обладнання. Вектор дисбалансу перпендикулярний до осі ротора, проходить через центр незрівноваженої маси і обертається разом з ротором. Напрям вектора дисбалансу збігається з напрямом ексцентриситету незрівноваженої маси. Головний момент дисбалансів у площинах опор межу бути замінений його складовими (симетричними дисбалансами). Головний момент дисбалансів у тих же площинах опор може бути замінений парою сил (кососиметричними дисбалансами).
Одиницями вимірювання дисбалансу є грам-міліметр (г•мм) і градус (…°), що слугують для вказання відповідно значення дисбалансу і кута дисбалансу. Відношення модуля головного вектора дисбалансів до маси ротора характеризує питомий дисбаланс (г · мм)/кг = мкм.
Розрізняють, також[1]:
- Початковий і залишковий дисбаланс — дисбаланс до і після коректування мас.
- Допустимий дисбаланс — найбільший залишковий дисбаланс, що вважається прийнятним.
- Технологічний дисбаланс — різниця значень залишкових дисбалансів в одних і тих же площинах, виміряних для виробу у зібраному стані (у власних підшипниках) і для виробу окремо (на спеціальному обладнанні).
- Експлуатаційний дисбаланс — різниця значень залишкових дисбалансів в одних і тих же площинах ротора, виміряних на виробі у зібраному стані до початку експлуатації і після того, як він відпрацював увесь ресурс до ремонту, що передбачає балансування.
Зрівноважування обертових тіл
Визначення та усунення дисбалансу (зрівноважування) проводиться при балансуванні, яке поділяється на:[1]:
Статичне балансування — балансування, при якому визначається і мінімізується головний вектор дисбалансів ротора, що характеризує його статичну незрівноваженість. Статичне балансування проводять в одній площині корекції; визначену для цієї площини коректуючи масу іноді зручно рознести у декількох паралельних площинах.
Моментне балансування — балансування, при якому визначається і мінімізується головний момент дисбалансів ротора, що характеризує його моментну незрівноваженість. Моменте балансування проводять не менше ніж у двох площинах корекції.
Динамічне балансування — балансування, при якому визначаються і мінімізуються дисбаланси ротора, що характеризують його динамічну незрівноваженість. Динамічне балансування жорсткого ротора достатньо проводити у двох площинах. Балансування гнучкого ротора проводять зазвичай у більше, ніж двох площинах. При динамічному балансуванні зменшуються як моментна, так і статична незрівноваженість ротора одночасно.
Види роторів за особливостями балансування
Жорсткий ротор — ротор, який збалансовано на частоті обертання, меншій за першу критичну у двох довільних площинах корекції і у якого значення залишкових дисбалансів не будуть перевищувати допустимі на всіх частотах обертання аж до найбільшої експлуатаційної.
Примітки:
- 1. Ротор повинен балансуватись на опорах, механічна жорсткість яких максимально наближена до жорсткості його опор в експлуатаційних умовах.
- 2. Жорстким іноді називають ротор, критична частота обертання якого набагато вища за його експлуатаційну частоту обертання.
Гнучкий ротор — ротор, що збалансований на частоті обертання, меншій за першу критичну у двох довільних площинах корекції і у якого значення залишкових дисбалансів можуть перевищувати допустимі на інших частотах, аж до найбільшої експлуатаційної.
Примітки
- ГОСТ 19534-74 Балансировка вращающихся тел. Термины.
Джерела
- Кіницький Я. Т. Теорія механізмів і машин: Підручник. — К.: Наукова думка,2002. — 660 с. ISBN 966-00-0740-Х
- Теорія механізмів і машин. Курс лекцій для студентів напряму підготовки 0902 «Інженерна механіка» денної та заочної форм навчання / Б. I. Червоний. — Рівне: НУВГП , 2006. — 216 с.
- Кореняко О. С. Теорія механізмів і машин: Навчальний посібник / За ред. Афанасьєва М. К. — К.: Вища школа,1987. — 206 с.
- Артоболевский И. И. Теория механизмов и машин: Учеб. для втузов.– 4-е изд., перераб. И доп. – М.: Наука. Гл. ред. физ.-мат. лит., 1988. – 640 с.
