Резонанс
Резона́нс (від лат. resono «відгук, відгукуюсь») — явище, що спостерігається в різного типу фізичних системах, які знаходяться під дією зовнішніх, змінних у часі (періодичних) збурень. Під дією таких збурень, у системах виникають коливання, які називають вимушеними. Найчастіше резонанс визначають як зростання амплітуди вимушених коливань в системі при збігу частоти зовнішньої сили з однією із власних частот коливальної системи. Однак, в багатьох випадках це не так. Для виникнення резонансу в системах з багатьма степенями свободи резонанс проявляється лише при певних умовах узгодження в просторі і часі характеристик зовнішніх збурень і внутрішніх властивостей системи. Зовнішні сили мають мати складові, що здатні збуджувати відповідні власні форми коливань.Явище резонансу було вперше описано Галілео Галілеєм у 1638 році: "можна привести в рух важкий нерухомий маятник, просто дмухаючи на нього, і повторюючи ці видихи з тією частотою, яка притаманна рухові самого маятника".і[1]. В описі резонансу Г. Галілей якраз звернув увагу на найсуттєвіше — на здатність механічної коливальної системи (важкого маятника) накопичувати енергію, що підводиться від зовнішнього джерела з певною частотою. Прояви резонансу мають певні специфічні особливості в різних системах і тому розрізняють різні його типи:
- механічний резонанс,
- акустичний резонанс,
- електромагнітний резонанс,
- ядерний магнітний резонанс,
- електронний спіновий резонанс,
- електронний парамагнітний резонанс,
- параметричний резонанс.
Основні властивості резонансних явищ найпростіше ілюструються при аналізі механічного резонансу в системах з різними властивостями.
Резонанси в механічних коливальних системах з одним ступенем вільності
Система з одним ступенем вільності є найпростішою механічною системою, аналіз поведінки якої при вимушених коливаннях під дією періодичної зовнішньої сили дає можливість висвітлити багато особливостей явища резонансу.
В показаній на рисунку системі маса прикріплена до невагомої пружини з жорсткістю . Будучи зміщеною в початковий момент з положення рівноваги маса здійснює незатухаючі коливання навколо цього положення з власною частотою . Червоною стрілкою показано зміну в часі сили, що діє з боку пружини на масу. Положення маси визначається періодичною функцією , яка змінюється з частотою .





Більш загальна математична модель системи з одним ступенем вільності враховує демфування коливальних рухів та можливі нелінійності в поведінці пружини (механізму формування відновлюючої сили). В цьому загальному випадку для функції, що визначає відхилення маси від положення рівноваги, одержуємо наступне диференціальне рівняння:[2]

В цьому рівнянні функція описує зміщення маси від положення рівноваги. Величина є характеристикою демпфування в системі і називається добротністю. Коефіцієнт визначає ступінь нелінійності в системі. Така форма рівняння вказує на можливість його використання при аналізі двох типів коливальних систем. Знак «+» перед ним вказує на те, що відновлююча сила зі збільшенням відхилення від положення рівноваги зростає швидше ніж в лінійній системі і така нелінійність називається жорсткою. Якщо нелінійність призводить до зменшення відновлюючої сили в рівнянні слід використовувати знак «-» і така нелінійність називається м'якою. Такий тип нелінійності, хоч і є лише одним із багатьох можливих типів, що зустрічаються в фізичних системах, дозволяє показати характерні особливості нелінійних резонансів. Вперше рівняння з квадратичною нелінійністю розглядалося в роботах Гельмгольця. В правій частині рівняння представлено певним чином обезрозмірену[2] зовнішню періодичну силу. Параметр визначається, як відношення частоти зовнішньої сили до власної частоти системи . Для розуміння особливостей моделювання резонансних явищ слід звернути увагу на те, що величина зовнішньої сили вважається незалежною від переміщень маси. Фізично це означає, що вимушені коливання системи стимулюються джерелом з нескінченним запасом енергії. Коливання в системах з обмеженою енергією джерела є предметом окремого напрямку в сучасній динаміці.[3]




Резонанс в лінійній системі без демпфування
В цьому випадку поведінка системи визначається таким рівнянням

Для аналізу поведінки системи слід одержати розв'язок цього рівняння при певних значеннях переміщення та швидкості маси в момент початку руху . Вибір початкових умов не має принципового значення при аналізі резонансних явищ і тому вважаємо, що система почала рух з положення рівноваги нульовим значенням початкової швидкості .



Розв'язок рівняння (2), що задовольняє вибрані початкові умови, має вигляд

відхилення маси від положення рівноваги в процесі руху являє собою суперпозицію двох гармонічних коливань з однаковими амплітудами — коливання з частотою зовнішньої сили і з власною частотою. Для визначення руху системи в випадку збігу частоти зовнішньої сили і власної частоти слід в виразі (3) здійснити граничний перехід коли прямує до одиниці. В результаті такого переходу одержуємо вираз
.

У відповідності з цим виразом система здійснює коливальний рух з амплітудою, що зростає пропорційно часу. Саме такий рух зображено графічно на представленому рисунку. З цього останнього виразу випливає, що резонанс, це процес зростання амплітуди коливань системи при певному узгодженні частоти зовнішньої сили з власною частотою системи. Якщо джерело зовнішньої сили має необмежений запас енергії амплітуда коливань в системі без демпфування необмежено зростає. Особливістю резонансу є також те, що при збігу частоти сили з власною частотою системи протягом певного часу негативних наслідків з точки зору можливого руйнування системи може і не бути.
Резонанс в лінійній системі з демпфуванням
В цьому випадку рівняння руху маси має вигляд

В такій системі уже не існує незатухаючих власних коливань коли система виводиться із положення рівноваги певними початковими збуреннями. Коливання в такій системі з часом затухають, а при певних значеннях добротності взагалі не виникають. В зв'язку з цим стає дещо умовним само поняття власної частоти. Для уточнення його змісту слід розглянути вільні коливання в такій системі з демпфуванням.
Для однорідного рівняння, що відповідає рівнянню (4) загальний розв'язок має вигляд:
.

Тут .

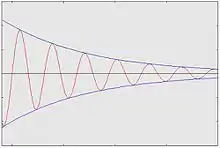
З цих виразів для показників степенів в загальному розв'язку випливає, що коливальний рух в системі можливий лише при умові . В цьому випадку якісна картина вільних коливань в системі з демпфуванням відображена на рисунку. Тут по горизонтальній осі відкладаються відрізки часу. Характерним в поведінці спадаючої кривої, що характеризує зміну в часі амплітуди відхилень системи від положення рівноваги є те, що проміжок часу між точками відносного максимуму (мінімуму) на цій кривій залишаються постійними. Саме через цей проміжок часу визначають частоту власних коливань системи з демпфуванням. Найчастіше значення цієї частоти визначають формулою . Тут .





Оскільки з часом власні коливання в системі з демпфуванням згасають при аналізі резонансу в таких системах використовують лише усталені вимушені коливання. Такі коливання визначаються частинним розв'язком рівняння (5). Цей розв'язок має вигляд

Цей вираз вказує, що амплітуда вимушених коливань системи з демпфуванням залишається обмеженою при будь-якому значенні частоти. Тепер для визначення резонансної ситуації слід знаходити ті значення частоти, при яких амплітуда тієї чи іншої кінематичної характеристики системи набуває максимального значення.
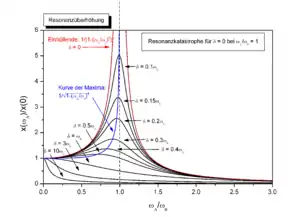
Аналізуючи на екстремум амплітуду виразу для , знаходимо, що максимум відхилення від положення рівноваги досягається при частоті зовнішньої сили, яка відрізняється від вказаної вище власної частоти вільних коливань системи з демпфуванням і дорівнює . В багатьох випадках практичного використання коливальних систем більш важливим є значення величини коливальної швидкості. Якщо ж, виходячи з виразу для переміщення, обчислити коливальну швидкість, як похідну по , і потім знайти максимум амплітуди, то він досягається при , тобто при частоті, що збігається з власною частотою відповідної системи без демпфування. Цей приклад показує, що в системах з демпфуванням слід розрізняти резонанс по переміщеннях і резонанс по швидкостях. При аналізі даних, приведених на рисунку для ілюстрації впливу демпфування на характер коливань, слід мати на увазі, що фактично на осі ординат відкладається коливальна швидкість, оскільки всі криві мають максимум на частоті системи без демпфування.



Як визначальний параметр при побудові системи кривих на рисунку вибрано величину демпфування. Видно, що при певних його значеннях не спостерігається зростання амплітуди коливань при збігу частоти зовнішньої сили з власною частотою системи без демпфування. В цьому випадку говорять про надкритичне демпфування коли добротність системи настільки мала, що присутня нерівність .

Амплітуди вимушених коливань на резонансних частотах в системах з демпфуванням залишаються обмеженими не дивлячись на необмеженість енергії зовнішнього джерела збуджуючої сили. Однак, для систем зі значною добротністю (з незначним демпфуванням)при коливаннях на резонансних частотах рівень механічних напружень може перевищувати граничні, з точки зору руйнування, рівні. Тут[4] наведено реальний приклад руйнування скляного бокала при збудженні коливань інтенсивним звуковим полем.
Резонанс в електричному колі
В електротехніці для опису процесів виробництва, передачі та використання електричної енергії використовують електричні кола, що включають такі ідеальні елементи, як опір, ємність, індуктивність та джерело електрорушійної сили. В таких колах, де джерело енергії генерує електричний струм, можуть виникати резонансні ефекти, аналогічні описаним для механічних систем[5]
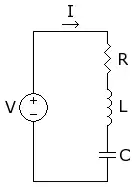
На малюнку зображено простий електричний контур, який називають RLC контуром, що відображає факт включення в коло трьох зосереджених елементів ~ індуктивності , опору та ємності . Якщо як основний параметр, що характеризує струм в контурі при періодичній зміні електрорушійної сили, вибрати величину заряду на конденсаторі , то диференціальне рівняння для його визначення згідно законам Кірхгофа, набуває вигляду[6]





Це рівняння з точністю до позначень, збігається з рівнянням (5), що описує вимушені коливання механічної системи. Зміна в часі величини заряду на конденсаторі повністю повторює зміну в часі величини відхилення маси від положення рівноваги в механічній системі. Власна частота для контуру без опору визначається співвідношенням . Саме при збігу частоти напруги, що генерується джерелом, з цією частотою буде досягати максимуму амплітуда першої похідної від заряду, т. б. сили струму .



Це лише один приклад, що ілюструє подібність в поведінці механічних та електричних коливальних систем. Детальний аналіз багатьох подібних ситуацій приведено в цитованій книзі Dynamical Analogies. Такі аналогії між механічними та електричними системами широко використовуються при аналізі поведінки складних електро~механічних систем, особливо в електроакустиці[7].
Резонанс в нелінійній системі
При аналізі вимушених коливань нелінійних систем відкрито низку специфічних фізичних ефектів, розвинуто нові методи аналізу математичних моделей в нелінійній механіці, що дає підставу для визначення нелінійної динаміки, як окремого наукового напрямку в сучасному природознавстві. Визначний вплив на формування цього напрямку зробили українські вчені, що належать до наукової школи. створеної академіками М. М. Боголюбовим та Ю. О. Митропольським.
Важливі дані про особливості нелінійних резонансів можна одержати при аналізі рівняння (1), для якого можливо одержати наближені аналітичні розв'язки[2]. Однак слід мати на увазі таку важливу обставину, що системи з різним характером нелінійності проявляють різну реакцію на дію періодичної зовнішньої сили. Навіть для однієї системи характер вимушених коливань суттєво залежить від співвідношення величин параметрів — амплітуди зовнішньої сили, характеру нелінійності, величини добротності. Так, при спробі одержати розв'язок рівняння (1) в вигляді суми тригонометричних функцій знаходимо, що в системі генеруються коливання з частотами . Це так звані супергармоніки. При певних умовах відгуку системи можуть збуджуватись, наприклад, коливання з частотою . Це~ субгармоніка. Для рівняння (1) при незначній нелінійності ( в області частот поблизу власної частоти відповідної лінійної системи без демпфування ( можна одержати наближений вираз для амплітуди основної гармоніки в відгуку нелінійної системи з жорсткою нелінійністю[2]





.

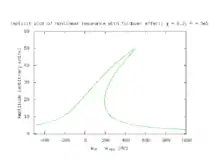
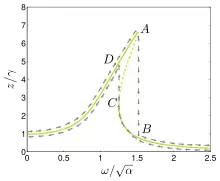
Характер визначеної цим співвідношенням залежності амплітуди від частоти подано на приведеному рисунку. Тут по горизонтальній осі відкладалася різниця між значеннями частоти зовнішньої сили і власної частоти лінійної системи. Принциповою відмінністю цієї кривої від резонансної кривої для лінійної системи є відсутність однозначної залежності між частотою і амплітудою. Фізично це призводить до того, що система по різному реагує на зовнішню періодичну силу в процесах зміни частоти вимушених коливань від високих частот до нижчих і від нижчих до високих. Для системи з м'якою нелінійністю максимальне значення амплітуди коливань зміщується в бік нижчих, по відношенню до власної частоти лінійної системи, частот. Значення амплітуд вимушених коливань в нелінійній системі з квадратичною та кубічною нелінійністю (осцилятор Дюфінга) представлено на рисунку. Така поведінка є типовою для нелінійних систем.
Дослідження резонансних явищ в нелінійних системах це лише один із напрямків досліджень в важливому напрямку сучасної механіки — теорії динамічних систем. Особливо активно ведуться дослідження, пов'язані з вивченням закономірностей виникнення в таких системах явища детермінованого хаосу. Хаотична поведінка розв'язків рівняння (1), яке часто називають рівнянням Дуфінга, та рівняння, що описує нелінійну систему з нелінійністю в демпфуючій силі (рівняння Ван дер Поля, детально досліджується в монографії[8] Систематичний аналіз загальних властивостей резонансних явищ в нелінійних системах проведено в[9].
Резонанси в системах з розподіленими параметрами (з нескінченним числом ступенів вільності)
Основна особливість резонансних явищ в системах з розподіленими параметрами ілюструється при аналізі вимушених коливань струни довжиною . Така коливальна система має нескінченній набір власних частот . Зовнішня періодична розподілена вздовж струни сила задається функцією Реакція струни на такого типу зовнішню дію виражається формулою[2]




З цього виразу випливає основна властивість резонансу в системах з розподіленими параметрами. Для виникнення резонансного явища недостатньо лише збігу частоти зовнішньої сили з однією із власних частот системи. Обов'язково в зовнішньому навантаженні має бути присутня складова, що здатна збудити коливання відповідної власної форми. Якщо, наприклад, в зовнішньому навантаженні відсутня складова, що відповідає першій власній формі (), то при коливаннях на частоті (частота зовнішньої сили дорівнює першій власній частоті системи) ніяких резонансних явищ не спостерігається. Такий висновок має загальне значення для будь-якої системи з розподіленими параметрами. Для таких систем виникнення резонансних ситуацій можливо лише тоді, коли частота зовнішнього збурення збігається з власною частотою системи і в просторовому розподілі збурення присутня складова, що відповідає власній формі коливань. Саме ця обставина має враховуватися при аналізі випадків типу руйнування мосту колоною військових.


Застосування
Явище резонансу широко використовується в науці й техніці. На ньому ґрунтується робота багатьох радіотехнічних схем та пристроїв, таких як коливні контури. Використовуючи явище резонансу, коли зовнішнє електромагнітне поле збуджує коливання в відповідно налаштованому резонансному контурі приймача, ми обираємо з різноманіття електромагнітних хвиль у просторі навколо нас саме ті, які відповідають нашій улюбленій радіостанції чи телевізійному каналу.
Можливості резонансних систем настільки широко використовуються при створенні машин, приладів, технологій, що задача достатньо повного опису конкретних прикладів є непосильною. Оскільки для опису особливостей резонансу використано механічні системи то можливо вказати певні джерела, знайомство з якими доповнить представлену інформацію і покаже можливості використання знань про коливальні та хвильові процеси при вирішенні інженерних задач. Перш за все вкажемо книгу[10]. Часто коливальні системи використовуються для випромінювання в навколишнє середовище звукових чи ультразвукових сигналів. Прикладами таких систем є гідроакустичні випромінювачі в активних гідроакустичних системах. В умовах резонансу працюють також випромінювачі в системах ультразвукового контролю та діагностики.
| безмасове навантаження | вагоме навантаження |
|---|---|
 Коливання струни під дією рухомої безмасової сили (v=0.1c); c є швидкість хвилі.  Коливання струни під дією рухомої безмасової сили (v=0.5c); c є швидкість хвилі. |
 Коливання струни під дією рухомого вагомого навантаження (v=0.1c); c є швидкість хвилі.  Коливання струни під дією рухомого вагомого навантаження (v=0.5c); c є швидкість хвилі. |
Проте не завжди резонанс корисний. Часто можна зустріти посилання на випадки, коли навісні мости ламалися при проходженні по них солдат «в ногу». При цьому посилаються на прояв резонансного ефекту. Ці легенди не мають надійного документального підтвердження. Для виникнення резонансних явищ потрібна не лише збіжність частот, а й певні співвідношення стосовно просторового розподілу зовнішніх зусиль. Швидше за все такі випадки пов'язані з недостатньою міцністю споруд. Часто, як приклад негативного прояву резонансних ефектів, вказують на руйнування під дією вітру уже сучасного (рік спорудження 1940) Такомського мосту в США. Однак тут причиною руйнування було явище аеродинамічного флатера, яке має іншу природу, ніж описані резонансні явища в механічних системах. При його виникненні демпфування в механічній системі не може обмежити амплітуду коливань. При аналізі впливу колони людей, що рухаються по мосту, слід мати на увазі, що важливим фактором є не частота кроку, а швидкість руху навантаження. Кількісну оцінку впливу рухомості навантаження визначають відношенням величин динамічного, змінного в часі прогину, до максимального статичного прогину мосту . Саме ця величина показана на рисунках. Приведені дані для двох величин швидкостей руху навантаження. На лівій частині рисунку показано деформацію струни при русі силового (без масового) навантаження з двома різними відношеннями швидкості руху до фазової швидкості хвилі в струні. На правій частині подані характеристики прогину для рухомого навантаження з певною масою (вагою). В цьому випадку виникає додаткове навантаження струни за рахунок сил інерції. Синіми лініями показано траєкторії руху навантажень, а рожевими -- положення точок струни. При русі масового навантаження з відносно високою швидкістю можливо зростання прогину майже вдвічі проти статичного прогину[11].

Див. також
Примітки
- Kartashova E. Nonlinear Resonance Analysis. Theory, Computation, Application. — Cambridge University Press,2010.—223 p.— ISBN 978-0-511-90826-2 (eBook)
- Грінченко В. Т., Вовк І. В., Маципура І. Т. Основи акустики , Київ.: Наукова думка, 2007, — 640 с., с.546
- Краснопольская Т. С., Швец А. Ю.Регулярная и хаотическая динамика систем с ограниченным возбуждением. ~Ижевск, Институт компьютерных исследований, 2008. ~280 с.ISBN 978-5-93972-619-1
- http://ed.ted.com/on/TEDpzivV
- Бойко В. С., Бойко В. В.,Видолоб Ю. Ф. та ін.Теоретичні основи електротехніки.~Т.1.Усталені режими лінійних електричних кіл із зосередженими параметрами.~Київ: Політехніка,2004.~272 с.ISBN 966-622-042-3.
- Olson H. F.Dynamical Analogies. ~New York: D.Van Nostrand Company,1943.~196 p.
- Римский~Корсаков А. В.Электроакустика. Архівовано 9 травня 2016 у Wayback Machine.~Москва: Связь,1973.~272 с.
- Мун Ф.Хаотические колебания.~Москва: Мир,1990.~311 с.~ISBN 5-03-001413-6.
- Rajasekar S.,Sanjnan M.A. F.Nonlinear resonance.~Springer,2016.~409 p.~ISBN 978-3-319-24886-8 (eBook)
- Фролов К. В.Вибрация — друг или враг?—Москва: Наука,1984.—144 с.
- Bajer C. I.,Dyniewcz B. Numerical Analysis of Vibration of Structures under Moving Inertial Load. Springer, 2012.- 294 p. eISBN 978-3-642-29548-5.
Література
- Грінченко В. Т., . Вовк І. В., Маципура В. Т. Основи акустики: Навчальний посібник. — К.: Наукова думка, 2007. — 640 с. — ISBN 978-966-00-0622-5.
- Азарєнков М. О., Гірка В. С., Лапшин В. І., Муратов В. І.Теорія коливань та хвиль.—Харків,2005.—154 с. ISBN 966-623-316-9.
- Василенко М. В., Алексейчук О. М.Теорія коливань і стійкості руху. —К.: Вища школа,2004.—525 с. ISBN 966-642-105-4.
