Крива погоні
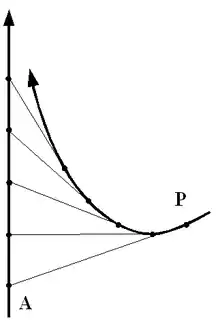
Крива́ пого́ні — трансцендентна крива, що являє собою розв'язок задачі про переслідування, яка формулюється наступним чином. Нехай точка рівномірно рухається по деякій заданій кривій. Потрібно знайти траєкторію рівномірного руху точки таку, щоб дотична, проведена до траєкторії в будь-який момент руху, проходила би через відповідне цьому моменту положення точки . Назва кривої визначається тією обставиною, що по ній повинна рухатись точка , що «переслідує» іншу точку як по найвигіднішій траєкторії переслідування, оскільки переслідуюча точка завжди буде мати швидкість спрямовану на точку переслідування, тобто намагатиметься досягнути її найкоротшим шляхом (по прямій).


Історична довідка
Задача про криву погоні сформульована Леонардо да Вінчі і вирішена П'єром Бугером в 1732.
Загальний випадок постановки задачі
Щоб вивести рівняння лінії оберемо систему координат, у якій лінія абсцис проходить через початкове положення точок і і точка знаходиться у початку системи координат xAy. Відношення сталих швидкостей точок позначимо через k.
Якщо допустити, що за нескінченно малий проміжок часу точка пройшла відстань , а точка — відстань , то , згідно з умовою, отримаємо співвідношення , або



- (1)

Далі слід виразити і через x, y та їх диференціали. Згідно з умовою координати точки мають задовольняти рівнянню дотичної до шуканої кривої, тобто



Приєднуючи до цього рівняння задане умовою рівняння траєкторії руху «втікача», можна визначити з отриманої системи рівняння та . Після підстановки цих значень у диференціальне рівняння (1) воно запишеться у вигляді



- .

Сталі інтегрування можуть бути знайдені з початкових умов ( при ).


У загальному випадку для довільно заданої кривої вирішення отриманого рівняння є досить складним. Задача суттєво спрощується, якщо розглянути найпростіший випадок, коли траєкторія руху «втікача» є прямою.
Проста крива погоні
Проста крива погоні отримується у простому випадку, коли точка, яку переслідують рухається по прямій лінії. Вперше її описав П'єр Бугер у 1732 році. Згодом П'єр Луї Мопертюї розглянув криву погоні для інших випадків.
Визначення
Нехай є точкою старту об'єкту переслідування, а — стартова точка переслідувача. Нехай точка рухається рівномірно із швидкістю у якомусь певному напрямі, а точка із швидкістю завжди спрямованою у точку . Траєкторія точки є простою кривою погоні.




Нехай

Рівняння в декартових координатах
Нехай і точка A рухається вздовж осі y:

- для
- для




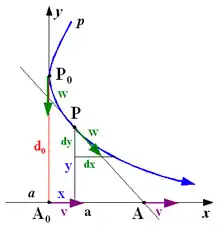
Розглянемо випадок A0(0,0), P0(0,1), при русі «втікача» вздовж осі x та при k > 0. У довільний момент часу «втікач» завжди знаходиться на дотичній до кривої траєкторії руху «переслідувача», тобто

на основі чого записуємо диференційне рівняння:
- , де


З умови випливає , після диференціювання по часу і , на основі яких:





Запишемо вираз для визначення довжини кривої:

З
- і наступним


випливає

Аналогчно проводимо диференціювання по :


Розв'язок з підстановкою
- ,

при розділенні змінних приводить до

після інтегрування:

і далі після застосування формального визначення sinh з отримуємо:


Повторно інтегруємо з визначенням сталої інтегрування . З початкових умов


випливає
- ,

а також

отримуємо:
- чи для



або:

На основі цих рівнянь можна отримати і рівняння, подані вище.
Властивості
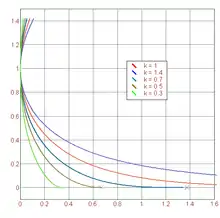
При k > 1 лінія погоні перетне пряму руху «втікача» і точка P дійсно наздожене точку A.
При При k ≤ 1 лінія погоні асимптотично наближається до прямої руху «втікача» і точка P не наздожене точку A.
При раціональному значенні k ≠ 1 лінія погоні є алгебраїчною кривою, при k цілому — кривою параболічного типу (якщо r = 2) лінія погоні стає кубікою Чирнгауза (англ. Tschirnhausen cubic). При k = 1 та при k ірраціональному крива погоні стає трансцендентною кривою.
При k = 1 (при однаковій швидкості «переслідувача» і «втікача») крива погоні перетворюється у трактрису
Задачі з декількома переслідувачами
У математиці задачею про декількох переслідувачів є задача, в якій декілька мишей, що перебувають в кутах правильного многокутника переслідують одна одну. Кожна миша починає рухатися з однаковою швидкістю у напрямку до найближчого сусіда (за годинниковою стрілкою чи проти годинникової стрілки). Завданням для вирішення є: проведення розрахунку та побудова траєкторії руху мишей до моменту їх зустрічі.
Практичне використання
Проблема побудови кривої погоні вперше постала при виборі курсу руху судна з врахуванням зовнішніх факторів (бокових вітрів, течії) для оптимального досягнення точки мети подорожі.
По новому ця проблема виникла при використанні у військових цілях підводних човнів, торпед, а пізніше, і керованих ракет з метою досягнення і ураженні рухомих цілей та у космічній навігації.
Системи самонаведення ракет
Основним завданням системи самонаведення ракети вважають забезпечення попадання її в ціль або перехоплення цілі з мінімальним промахом. Оскільки ракета керована і є можливість змінювати траєкторію польоту ракети відразу ж після пуску, то в принципі існує велика множина траєкторій, при русі по яких самонавідна ракета вразить ціль. Проте практично намагаються вибрати ту з них, яка за даних умов стрільби забезпечує найнадійніше ураження цілі.
Умова, покладена в основу роботи системи самонаведення, називається методом наведення. Метод наведення визначає теоретичну траєкторію руху ракети. Обраний метод наведення здійснюється, як правило, за допомогою обчислювального пристрою, який отримує інформацію про відносне положення ракети і цілі, про швидкості і напрямки їх руху. На базі цієї інформації обчислюється бажана траєкторію руху ракети і визначається найвигідніша точка зустрічі її з ціллю. Результат обчислень перетворюється у команди керування, що надходять на рулі. Рулі, відхиляючись, управляють ракетою по заданому закону. Одним з методів наведення ракет є використання математичних залежностей, якими описується крива погоні[1].
Див. також
Примітки
- Куроткин В. И., Стерлигов В. Л. Самонаведение ракет. М.:Военное издательство Минобороны СССР. 1963, 88 с.
Посилання
- Ігнатенко О. П. Лінійні ігрові задачі взаємодії груп керованих об'єктів та їх застосування в інформаційних технологіях[недоступне посилання з липня 2019] Інститут програмних систем НАН України.
- Ігнатенко О. П. Лінійні ігрові задачі керування рухомими об'єктами : дис. канд. фіз.-мат. наук: 01.05.01 / НАН України; Інститут кібернетики ім. В.М.Глушкова. - К., 2006.
- Крива погоні на MathWorld (англ.)
Джерела
- Савелов А. А. Плоские кривые: Систематика, свойства, применения. Справочное руководство. М.: Физматгиз, 1960. 293 с.