Механіка контактної взаємодії
Меха́ніка конта́ктної взаємоді́ї — розділ теорії пружності і опору матеріалів, що займається вивченням напружено-деформованого стану твердих тіл, які взаємодіють одне з одним в одній або декількох точках[1][2].
Фізичні та математичні формулювання предмету досліджень будуються на положеннях наук механіки деформівного твердого тіла, теорії пружності та опору матеріалів і орієнтовані на проведення розрахунків з врахуванням пружних, вязкопружних і пластичних деформацій в умовах статичного або динамічного контакту. При контактній взаємодії виникають механічні напруження, що діють перпендикулярно до поверхонь контактуючих тіл (нормальні напруження) та фрикційні напруження, що діють по дотичній до поверхонь у зоні контакту. Механіка контактної взаємодії орієнтована в основному на вивчення нормальних напружень при відсутності тертя. Фрикційні напруження, що виникають у зоні контакту вивчаються окремою наукою про тертя та зношування — трибологією.
Для умов контактної взаємодії характерним є те, що передача зусиль між твердими тілами відбувається через дуже малі площадки, в результаті механічні напруження, що виникають там σконт досягає великих значень. Контактні напруження мають місцевий характер, вони дуже швидко зменшуються по мірі віддалення від місця контакту. Вивчення контактних напружень важливе для розрахунку деталей машин (підшипники кочення, зубчасті колеса, кулачкові механізми), для умов роботи коліс залізничних вагонів та рейок, при обробці вальцюванням, при розробці технологій ультразвукового зварювання тощо.
Історичні дані
Перша наукова праця з механіки контактної взаємодії датується 1882 роком, коли німецьким фізиком Генріхом Герцом було опубліковано статтю «Про контакт пружних тіл» («On the contact of elastic solids»[3]) («Ueber die Berührung fester elastischer Körper»[недоступне посилання з квітня 2019]). У цій праці Г.Герц розв'язав задачу про контакт двох пружних тіл з викривленими поверхнями. Цей класичний результат і сьогодні лежить в основі механіки контактної взаємодії.
Подальший розвиток механіки контактної взаємодії в середині 20-го століття пов'язаний з іменами Боудена і Тейбора. Вони перші вказали на важливість врахування шорсткості поверхні тіл, що контактують[4][5]. Шорсткість призводить до того, що дійсна площа контакту між тілами, що зазнають взаємного тертя набагато менша ймовірної площі контакту. Ці уявлення істотно змінили напрямок багатьох трибологічних досліджень. Роботи Боудена і Тейбора викликали появу низки теорій механіки контактної взаємодії шорстких поверхонь.
Піонерськими роботами в цій області є роботи Архарда (1957)[6], який прийшов до висновку, що при контакті пружних шорстких поверхонь площа контакту приблизно пропорційна нормальній силі. Подальший важливий внесок у теорію контакту шорстких поверхонь внесли Грінвуд і Вілльямсон (1966)[7], Буш (1975)[8] і Перссон (2002)[9]. Головним результатом цих робіт є доказ того, що дійсна площа контакту шорстких поверхонь у грубому наближенні пропорційна до нормальної сили, в той час як характеристики окремих мікроконтактів (тиск, розмір мікроконтактів) слабо залежать від навантаження.
Джонсон, Кендал і Робертс (1971) знайшли рішення аналогічне до рішення Г.Герца для контактної задачі в умовах адгезійного контакту (JKR — теорія)[10] .
Основні допущення механіки контактної взаємодії
В основу його теорії контактних напружень покладені наступні припущення:
- навантаження створюють у зоні контакту тільки пружні деформації, що випливають із закону Гука;
- площа контакту є малою в порівнянні з радіусом кривини і лінійними розмірами поверхонь дотичних тіл;
- сили тиску, розподілені по поверхнях контакту по нормалі до цих поверхонь.
- сили тертя між дотичними тілами є малими і ними можна знехтувати.
При цьому знайдено, що при стисненні двох тіл, обмежених плавними поверхнями, поверхня контакту має форму еліпса (в окремих випадках, кола чи смуги), а інтенсивність розподілу контактних напружень по цій площі описується еліпсоїдальним законом. Контактні напруження носять місцевий характер, тобто швидко зменшуються при достатньому видаленні від місця контакту (дотику тіл). Розподіл контактних напружень по поверхні контакту та в її околиці є нерівномірним і характеризується великими градієнтами.
Класичні задачі механіки контактної взаємодії
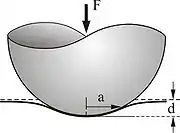
Контакт між сферою і пружним напівпростором
Тверда куля з радіусом втискується в пружний напівпростір на глибину (глибина проникнення), утворюючи область контакту з радіусом .



Силу, яку слід прикласти становить
- , де

- .

і модулі Юнга, а и — коефіцієнт Пуассона матеріалів обох тіл.




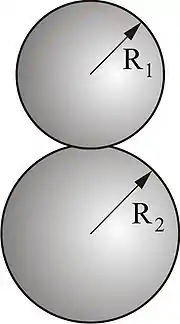
Контакт між двома сферами
При контакті двох куль з радіусами та ці рівняння є справедливими для значення ефективного радіуса



Розподіл тиску в площині контакту у залежності від радіуса r на площі контакту розраховується[1] як

де p0 — максимальний контактний тиск:
- .

А радіус a площини контакту, що утвориться для випадку взаємного стиску силою F двох куль радіусами R1 і R2 визначають за формулою:

Максимальне дотичне напруження досягається під поверхнею, для при .


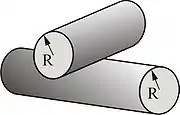
Контакт між двома перехресними циліндрами однакових радіусів
Задача про контакт між двома перехресними циліндрами однакових радіусів зводиться до задачі про контакт між сферою радіусом і пружним напівпростором (див.вище).
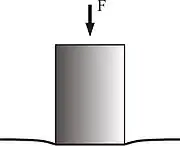
Контакт між твердим циліндричним індентором і пружним напівпростором
Якщо твердий циліндр радіусом a втискується в пружний півпростір, то тиск у залежності від радіуса r розподіляється наступним чином[11]

де

Зв'язок між глибиною проникнення і прикладеною силою визначається
- .

Див. також
Примітки
- Johnson, K. L, 1985, Contact mechanics, Cambridge University Press.
- Popov, Valentin L., 2010, Contact Mechanics and Friction. Physical Principles and Applications, Springer-Verlag, 362 p., ISBN 978-3-642-10802-0.
- H. Hertz, Über die berührung fester elastischer Körper (On the contact of rigid elastic solids). In: Miscellaneous Papers. Jones and Schott, Editors, J. reine und angewandte Mathematik 92, Macmillan, London (1896), p. 156 English translation: Hertz, H.
- , Bowden, FP and Tabor, D., 1939, The area of contact between stationary and between moving surfaces, Proceedings of the Royal Society of London. Series A, Mathematical and Physical Sciences, 169(938), pp. 391–413.
- Bowden, F.P. and Tabor, D., 2001, The friction and lubrication of solids, Oxford University Press.
- Archard, JF, 1957, Elastic deformation and the laws of friction, Proceedings of the Royal Society of London. Series A, Mathematical and Physical Sciences, 243(1233), pp.190-205.
- Greenwood, JA and Williamson, JBP., 1966, Contact of nominally flat surfaces, Proceedings of the Royal Society of London. Series A, Mathematical and Physical Sciences, pp. 300–319.
- Bush, AW and Gibson, RD and Thomas, TR., 1975, The elastic contact of a rough surface, Wear, 35(1), pp. 87-111.
- Persson, BNJ and Bucher, F. and Chiaia, B., 2002, Elastic contact between randomly rough surfaces: Comparison of theory with numerical results, Physical Review B, 65(18), p. 184106.
- K. L. Johnson and K. Kendall and A. D. Roberts, Surface energy and the contact of elastic solids, Proc. R. Soc. London A 324 (1971) 301–313
- Sneddon, I. N., 1965, The Relation between Load and Penetration in the Axisymmetric Boussinesq Problem for a Punch of Arbitrary Profile. Int. J. Eng. Sci. v. 3, pp. 47-57.
Посилання
- Опір матеріалів. Підручник /Г. С. Писаренко, О. Л. Квітка, Е. С. Уманський. За ред. Г. С. Писаренка — К.: Вища школа,1993. — 655 с. ISBN 5-11-004083-4
- Опір матеріалів: Навч. посіб. для студентів ВНЗ. Рекомендовано МОН / Шваб'юк В. І. — К.: 2009. — 380 с.
- Мильніков О. В. Опір матеріалів. Конспект лекцій / Олександр Володимирович Мильніков. — Т.: Видавництво ТНТУ, 2010. — 257 с.