Мультикоптер
Мультико́птер (англ. multi rotor, multicopter, copter) — літальний апарат з довільною кількістю несучих гвинтів, розміщених в одній площині, що обертаються діагонально в протилежних напрямках.

.jpg.webp)
Назва «квадрокоптер» (англ. quadrocopter) стосується апаратів із чотирма роторами. Дана стаття розглядає малогабаритні, непілотовані апарати.
Мультикоптери можуть виконувати вертикальний зліт і посадку, горизонтальний політ, а також стабільно зависати в повітрі.
Історія

Багатороторні вертольоти розроблялися ще в перші роки вертольотобудування. Одними з перших квадрокоптерів, які реально відривались від землі і могли триматися в повітрі, були апарати, що сконструював та випробував французький інженер Étienne Oehmichen. Після першої вдалої спроби в 1920 році він вже на своєму 4-роторному гвинтокрилі Oehmichen No.2 14 квітня 1923 року встановив перший в історії FAI рекорд дальності для вертольотів, пролетівши відстань 358 метрів. Через рік, 4 травня 1924 року, йому вдалося пролетіти по колу дистанцію в один кілометр за 7 хвилин і 40 секунд.
Дослідник Георгій Ботезату (США) виконав низку польотів на подібному 4-роторному гвинтокрилі в 1922 році. Недоліком цих гвинтокрилів була складна трансмісія, що пов'язувала двигун з кількома гвинтами, та складність керування ними для утримання рівноваги. Поява перших вертольотів з хвостовим гвинтом та шайбою перекоса ротора зробила розвиток таких апаратів недоцільним. Нові розробки почалися в 1950-і роки, але далі прототипів справа не просунулася.
Нове народження мультикоптери отримали десь на межі 2010-х років, вже як авіамоделі та безпілотні апарати. Це стало можливим завдяки появі легких та чутливих гіроскопів на основі п'єзоелементів, які використовувались в радіокерованих моделях вертольотів, та сучасним мікропроцесорам. Також оснащення коптерів потужними і надійними безколекторними електродвигунами, що живляться від літій-полімерних акумуляторів, значно спростили механічну конструкцію апаратів.
Одними із перших, хто досяг значних успіхів в створенні сучасних мультикоптерів, були розробники німецької компанії HiSystems GmbH, які створили проект «Mikrocopter»[1]. Китайська компанія DJI почала виробляти готовий до польоту і простий в користуванні квадрокоптер Phantom Quadrocopter, оснащений відеокамерою для керування та зйомки.
В жовтні 2011 року в Німеччині було здійснено політ пілотованого електричного мультикоптера концепції Volocopter[2], який протримався в повітрі 90 секунд.
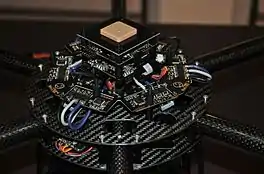
Принцип дії та конструкція
Мультикоптери мають три або більше гвинтів з постійним кутом атаки, кожен з яких приводиться в рух власним двигуном. Половина гвинтів обертається за годинниковою стрілкою, половина — в протилежному напрямку, взаємно компенсуючи обертання апарату навколо вертикальної осі. Мультикоптер маневрує шляхом зміни швидкості обертання гвинтів. Наприклад:
- збільшити оберти всіх гвинтів — вертикальний підйом;
- збільшити оберти з одного боку і зменшити з іншого — рух у бік;
- збільшити оберти, що обертаються за годинниковою стрілкою, і зменшити що обертаються проти — поворот.
Квадрокоптери відрізняються розташуванням роторів відносно повздовжньої осі. Наприклад: конфігурація «+» — ротори спереду—ззаду, ліворуч—праворуч; конфігурація «Х» — ротори діагонально попарно ліворуч та праворуч (див. анімацію та таблицю).
Конфігурації квадрокоптерів та схеми керування
| Конфігурація | зліт | зниження | обертання
проворуч |
обертання
лівоворуч |
нахил
вперед |
нахил
назад |
нахил
вправо |
нахил
вліво |
|---|---|---|---|---|---|---|---|---|
 -Конфігурація |
Оберти
ABCD пропорційно збільшити |
Оберти
ABCD пропорційно зменшити |
Оберти BD збільшити
та AC пропорційно зменшити |
Оберти AC збільшити та BD пропорційно зменшити |
Оберти C збільшити
та A пропорційно зменшити |
Оберти A збільшити
та C пропорційно зменшити |
Оберти D збільшити
та B пропорційно зменшити |
Оберти B збільшити
та D пропорційно зменшити |
 - та H-Конфігурація (показано штрихом) |
Оберти
ABCD пропорційно збільшити |
Оберти
ABCD пропорційно зменшити |
Оберти BD збільшити
та AC пропорційно зменшити |
Оберти AC збільшити
та BD пропорційно зменшити |
Оберти CD збільшити
та/або AB зменшити |
Оберти AB збільшити
та/або CD зменшити |
Оберти AD збільшити
та/або BC зменшити |
Оберти BC збільшити
та/або AD зменшити |


Система керується мікропроцесором («мозок» апарату), який перетворює сигнали з гіроскопів та передавача радіокерування в команди двигунам. Щоб забезпечити рівновагу в повітрі та стабільне зависання, мультикоптер оснащений трьома гіроскопами. Вони контролюють положення апарата по крену, тангажу та обертанню навколо вертикальної осі.
Кожен гіроскоп миттєво реагує на мінімальне відхилення від своєї осі налаштування та подає сигнал на процесор, який в свою чергу, через регулятори ходу контролює оберти електродвигунів, що забезпечує рівновагу апарата в повітрі.
Як допоміжний інструмент, іноді також використовується акселерометр і бародатчик, сигнали від яких дозволяють процесору фіксувати апарат на потрібній висоті. Залежно від потреби, апарати також оснащують GPS-приймачем, що дозволяє задавати з комп'ютера маршрут автоматичного польоту, а також, у разі втрати керуючого радіосигналу, повертати коптер в точку старту. Також застосовують сонар для автоматичної посадки і утримання невеликої висоти, а також обльоту перешкод.
Механічна конструкція мультикоптера надзвичайно проста та надійна. На променевій рамі, рівновіддалено від центру, у вертикальному положенні розміщують електродвигуни. Безпосередньо на валах двигунів, без будь-яких рухомих механізмів, встановлені пластикові пропелери. Кожен двигун під'єднаний до свого контролера (регулятора обертів). На платформі в центрі рами встановлено процесор, електроніка навігації, приймач системи радіокерування, акумулятор та шасі. В такій простій механічні конструкції майже не виникає вібрації, як, наприклад, у вертольота. Найбільше розповсюджені схеми коптерів, що мають таку кількість двигунів: чотири (квадрокоптер), шість (гексакоптер) та вісім (октокоптер). Щоб збільшити корисне навантаження, деякі моделі оснащують двигунами з коаксіальними пропелерами.
Окрім апаратів промислового виробництва, складання мультикоптера в домашніх умовах є захопливим хобі авіамоделістів-аматорів.
Для цього потрібні:
- Польотний контролер
- Рама
- Гвинтомоторні група
- Система радіокерування авіамоделями
Використання радіотехтехнологій
В квадрокоптерах для управління та передачі інформації використовують радіотехтехнології широкосмугового радіодоступу в діапазоні частот 2400… 2483,5 МГц.[3]
Крім того, для передачі відеосигналу з відеокамери може застосовуватись стандарт IEEE 802.11a/n (WiFi: 5 150-5 350; 5 470 - 5 670; 5 725 - 5 850 МГц).[3]
В найбільш складних моделях у діапазоні частот 5 737 - 5 808 МГц може здійснюватись передача службової інформації між кількома пультами дистанційного керування.[3]
Застосування мультикоптерів

Сучасні мультикоптери використовують безколекторні електродвигуни та літій-полімерні акумулятори. Це накладає певні обмеження на їх польотні характеристики: маса мультикоптера становить 1 — 4 кг, час польоту може бути від 10 до 30 хвилин[4][5] (окремі екземпляри — до 30-50 хвилин).
Мультикоптер середнього розміру може підняти корисний вантаж вагою від 500 г до 2—3 кг. Це вага невеликої фото- або відеокамери (зазвичай екшн-камера в дешевших моделях, або дзеркальні камери в професійних). Існують і досить великі моделі коптерів, які мають 6—8 роторів (гекса- і октокоптери), що здатні підняти в повітря вантаж масою до 20—30 кг. Мультикоптер може розвивати швидкість польоту до 100—110 км / год.
Запас енергії батарей дозволяє окремим моделям мультикоптерів відлітати на відстань до 7-12 км. Зазвичай максимальна відстань, на яку вони здатні полетіти з наступним поверненням в точку зльоту, обмежена прямою видимістю пілота (100—200 м) та дальністю дії апаратури радіокерування. Найкращі зразки подібної апаратури, що використовує підсилювачі потужності радіосигналу і систему спрямованих антен, здатні забезпечувати стабільне радіокерування і передачу відеосигналу на відстань понад 10 км. Таким чином, максимальне обмеження на радіус дії мультикоптер накладає саме час польоту.
Ці обмеження дозволяють використовувати мультикоптер, зазвичай, як апарати «ближнього радіуса дії» для аматорських польотів недалеко від себе. Для порівняння, безпілотні літаки з акумулятором аналогічної ємності можуть відлітати на 10—15 км при висоті польоту 1-2 км.
Завдяки простоті конструкції квадрокоптери часто використовуються в аматорському авіамоделюванні. Мультикоптер — зручний та недорогий засіб для аерофото- і кінозйомки. Поміж тим, в багатьох країнах невеликі стандартні або спеціально виготовлені коптери успішно використовують органи правопорядку, пожежні та екологічні служби, а також військові.
Керувати коптером значно простіше, ніж іншими авіамоделями, хоча існує проблема візуального контролю за невеликим апаратом при віддаленні. Для того, щоб пілот краще визначав положення коптера в повітрі, його борти (сторони) підсвічують різнокольоровими світлодіодами або маркують яскравими стрічками.
Перспективи
У 2011 році група молодих інженерів німецької компанії Е-volo вперше випробувала 16-гвинтовий мультикоптер E-Volo VC1[6], який підняв людину в повітря. Вже реалізується проект створення кількох літальних гвинтокрилих пілотованих апаратів Volocopter, які оснащені несучими електричними двигунами та маршовим ДВЗ із штовхаючим гвинтом.[7]
Багатьма дослідниками успішно ведуться роботи по створенню автономних динамічних керованих систем (літаючих будівельних роботів, дронів спостереження, тощо) здатних самостійно виконувати запрограмовані завдання.[8]
Юридичний аспект та безпека
Сучасні коптери стали доступними не тільки дещо інформованим в правилах безпеки польотів авіамоделістам-аматорам, але і більш широкому загалу. Тому в більшості країн існує законне регламентування порядку використання подібних дронів за межами місць, відведених для польотів авіамоделістів[9]. Особливо це стосується запуск апаратів на відстані, що лежать поза візуальним контактом з пілотом. Також відеозйомка з коптера може порушувати правила приватного життя.
Порушення правил використання повітряного простору може створювати істотну загрозу безпеці повітряних польотів. Кримінальний кодекс України (стаття 282) передбачає покарання за «вчинення дій у повітряному просторі», які створили таку загрозу або спричинили потерпілим тілесні ушкодження, завдали «великої матеріальної шкоди», або спричинили загибель людей.
Див. також
Примітки
- GmbH, HiSystems. MikroKopter • Universelle UAV Lösung. www.mikrokopter.de. Процитовано 30 січня 2016.
- User, Super. Volocopter I News I Historie. www.volocopter.com. Процитовано 30 січня 2016.
- Центр з сертифікації УДЦР розпочав тестування чергової лінійки квадракоптерів на замовлення компанії-імпортера. 23.09.2016.
- Слюсар В.И. Электроника в борьбе с терроризмом: защита гаваней. Часть 2. //Электроника: наука, технология, бизнес. – 2009. - № 6. - C. 90 - 95.
- FANCOPTER - EMT Penzberg. Emt-penzberg.de. Процитовано 10 листопада 2018.
- Volocopter: 18-propeller electric helicopter takes flight. CNN. Процитовано 30 січня 2016.
- The Volocopter demonstrates dynamic high speed flight properties
- Літаючі дрони самостійно побудували міст з мотузок. Архів оригіналу за 2 лютого 2017. Процитовано 28 січня 2017.
- нормативи використання дронів – bpla.org.ua. bpla.org.ua. Процитовано 15 лютого 2016.
Джерела та посилання
- Всеукраїнська Федерація Власників Безпілотників
- Журнал «МОДЕЛІСТ» ISSN 1815-8161, № 5 2012 Е-volo Volocopter — новый летательный аппарат
- Обгововорення теми коптерів - modelka.com.ua
Література
- Roland Büchi: Faszination Quadrokopter. 1. Auflage. Verlag für Technik und Handwerk, vth, 2010, ISBN 978-3-88180-791-3.
- Thomas Riegler: Quadrokopter richtig einstellen und fliegen. Franzis, Poing 2011, ISBN 978-3-645-65073-1.
- Christian Rattat: Multicopter selber bauen: Grundlagen — Technik — eigene Modelle. dpunkt-Verl., Heidelberg 2015. ISBN 978-3-86490-247-5.