Поліноміальні моделі цифрових пристроїв
Поліноміальна модель цифрового пристрою — це аналітичний вираз у вигляді поліному, який однозначно відображає алгоритм перетворення вхідних даних у вихідні.
Наприклад: Задана таблиця 1 цифрового пристрою, що реалізує функцію F(Xi)(вихідні дані). Вхідними даними є аргумент X, що визначає номер рядка таблиці, представлений у вигляді натурального числа у десятковій системі числення (X10 = 0, 1, 2, …, m). Для синтезу поліноміальної моделі цифрового пристрою використовують двозначну або тризначну систему числення (тризначна система числення використовувалась в ЭОМ «Сетунь»). В цьому випадку аргумент X замінюють кодом числа X в одній із вказаних систем числення зі змінними xi, які однозначно визначають X10 = де:

- q — основа системи числення,
- xk+1 — значення xk+1 розряду,
Таблиця 1.
| X | xn | . | xi | . | x1 | F(xi) |
|---|---|---|---|---|---|---|
| 0 | 0 | . | 0 | . | 0 | F(0) |
| 1 | 0 | . | 0 | . | 1 | F(1) |
| . | . | . | . | . | . | . |
| k | xkn | . | xki | . | xk1 | F(k) |
| . | . | . | . | . | . | . |
| m | xmn | . | xmi | . | xm1 | F(m) |
Задача створення аналітичного виразу (математичної моделі) у вигляді полінома F(xi) від незалежних змінних xi), зводиться до визначення вигляду та коефіцієнтів цього полінома, що в свою чергу, залежить від обраної системи числення.
Поліноміальну математичну модель F(xi) шукають у вигляді скалярного добутку двох векторів — bt та P(X) (де: bt — транспонований вектор b).
Компонентами вектора bt є коефіцієнти апроксимуючого полінома.
Нелінійна частина апроксимуючого полінома P(X) залежить від обраної системи числення. Компонентами вектора P(X) для двозначної системи числення є одночлени алгебраїчного полінома, отриманого шляхом перемноження простих лінійних функцій для одного розряду: P(X)=(1+x1)(1+x2)(1+x3)…(1+xi)=1 + x1 + x2 + x1 x2 + x3 + x1 x3 + x2 x3 + x1 x2 x3… до тих пір, поки не виконається співвідношення 2i = m (m — кількість рядків в таблиці 1).
Компонентами вектора P(X) для тризначної системи числення є одночлени алгебраїчного полінома, отриманого шляхом добутку простих квадратних функцій для одного розряду: P(X)=(1 + + )(1+ + )(1 + + )…(1 + + ) = 1 + + + + + + + + + + + + + + + + + + + + + + + + + + … до тих пір, поки не виконається співвідношення 3i = m.








Апроксимуючий поліном прийме вигляд:
F(xi)=bt*P(X) =: + + …



Задача формування математичної моделі зводиться до визначення компонент bj (j= 0,1, …m) вектора b.
Двозначна система числення
Алгебраїчний поліном.
Алгоритм визначення коефіцієнтів bj полінома F(xi). Вхідним виразом служить матриця C1: .

Подальші матриці будуються за рекурсивною процедурою: до тих пір, поки не виконається співвідношення 2i = m

Для знаходження вектора b, що складається з компонент шуканих коефіцієнтів bj, необхідно перемножити матрицю Ci на вектор, що складається з компонент правого стовпчика F(xi) таблиці 1:
b = Ci * F(xi)
Поліном Жегалкіна.
Поліном Жегалкіна має той же вигляд, що і алгебраїчний поліном. Відмінність полягає в тому, що операції алгебраїчного множення та суми замінюються на логічні функції кон'юнкції та суми по mod.2 (виключної диз'юнкції).
Вхідним виразом служить матриця C1:

Подальші матриці будуються відповідно за рекурсивною процедурою:

до тих пір, поки не виконається співвідношення 2i=m .
Для знаходження вектора b, необхідно перемножити матрицю Ci на вектор, що складається з компонент правого стовпчика таблиці 1 з урахуванням підсумовування часткових добутків по mod.2: b = [(Ci)*F(xi)]mod2.
Тризначна система числення
Тризначна симетрична система числення (-1,0,1)
Матриця C1 для симетричної системи числення має вигляд:
C1=

Наступні матриці будуються відповідно до рекурсивних співвідношень:
Ci=

Вектор b знаходять у відповідності з виразом: b=[(Ci)*F(xi)], а поліноміальну математичну модель згідно з виразом:
F(xi) = bt * P(X)
Тризначна несиметрична система числення (0,1,2)
Алгоритм той же, що і для симетричної системи числення, відмінність тільки в матрицях:
C1=

Ci=

b=[(Ci)*F(xi)];
F(xi) = bt * P(X).
Модифікація полінома Жегалкіна для тризначної системи числення
Модифікований поліном Жегалкіна має той же вигляд, що і алгебраїчний поліном для тризначної системи числення. Відмінність полягає в тому, що алгебраїчна сума замінюється на логічну функції суми по mod.3. Операція множення і зведення в квадрат аргументів xi відповідають алгебраїчному множенню і зведенню аргументу в квадрат:
Існування і єдиність представлення модифікованим поліномом Жегалкіна будь-якої функції тризначної логіки аналогічно доказу для двозначної логіки.
Тризначна симетрична система числення (-1,0,1)
Алгоритм визначення коефіцієнтів bj (j= 0,1, …m) аналогічний визначенню цих коефіцієнтів для алгебраїчного полінома в симетричній системі числення (-1,0,1). Відмінність у вхідних матрицях. Матриця C1 для симетричної системи числення (-1,0.1) має вигляд:
C1= .

Рекурсивне співвідношення для наступних матриць: Ci= .

Вектор b шукаємо у відповідності з виразом: b=[(Ci)*F(xi)]mod3, а поліноміальну математичну модель згідно з виразом: F(xi) = (bt * P(X))mod.3.
Тризначна несиметрична система числення (0,1,2)
Матриця C1 для несиметричною системи числення (0,1,2):
C1=

Рекурсивне співвідношення для наступних матриць: Ci=

b=[(Ci)*F(xi)]mod3;
F(xi) = (bt * P(X))mod.3.
Приклади
Двозначна система числення. Алгебраїчний поліном
Задана таблиця 2. Визначити компоненти bj (j= 0,1, …7) вектора b поліноміальної математичної моделі F(xi)=bt * P(X):
Таблиця 2.
| x3 | x2 | x1 | F(xi) |
|---|---|---|---|
| 0 | 0 | 0 | F(0)=0 |
| 0 | 0 | 1 | F(1)=1 |
| 0 | 1 | 0 | F(2)=4 |
| 0 | 1 | 1 | F(3)=9 |
| 1 | 0 | 0 | F(4)=16 |
| 1 | 0 | 1 | F(5)=25 |
| 1 | 1 | 0 | F(6)=36 |
| 1 | 1 | 1 | F(7)=49 |
Будуються матриці C2 та C3:


Шуканий вектор b = C3 * F(xi)=

Поліноміальна математична модель:
F(xi) = bt * P(X)=
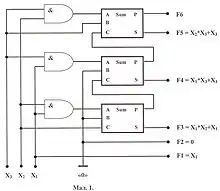
= + 4* + 4** + 16* + 8** + 16**

Якщо коефіцієнти bj замінити кодами чисел у двозначній системі числення, то отримаємо вектор F(xi), який встановлює зв'язок між розрядами аргумента xi і функції f(k)(k=1,2,…,6):
F(k)=bt * P(X) =

Принципова схема пристрою для зведення чисел у квадрат, згідно отриманої поліноміальної моделі, зображена на мал.1:
Двозначна система числення. Алгебра Жегалкіна
Задана таблиця 3. Визначити компоненти bj (j= 0,1, …7) вектора b для полінома Жегалкіна:
Таблиця 3.
| x3 | x2 | x1 | F(xi) |
|---|---|---|---|
| 0 | 0 | 0 | F0=0 |
| 0 | 0 | 1 | F1=1 |
| 0 | 1 | 0 | F2=0 |
| 0 | 1 | 1 | F3=1 |
| 1 | 0 | 0 | F4=0 |
| 1 | 0 | 1 | F5=0 |
| 1 | 1 | 0 | F6=1 |
| 1 | 1 | 1 | F7=1 |
Будуються матриці C2 та C3:


Шуканий вектор b:

Поліноміальна математична модель: F(xi)=bt*P(X) = + * + * ]mod.2.

Таблиця 3 реалізує функцію D-тригера. Змінним xi відповідають найменування входів і виходів: x1 = Qt; x2 = D; x3 = C; F(xi) = Qt+1.
Алгоритм функціонування D-тригера описується формулою:Qt+1 = [Qt * (C + 1) + D * C)]mod.2.
Для зменшення обсягу обчислень застосовують властивості рекурсивної процедури побудови матриці Cj. У даному випадку знаходять перші значення коефіцієнтів bj1 (j1 = 0,1, 2, 3) застосовуючи співвідношення: bj1 = [(C2)*F(xi1)]mod2. . Останні коефіцієнти bj2 (j2= 4,5, 6, 7) обчислюються за формулою: bj2=[bj1 + (C2)*F(xi2)]mod2.
Значення функції F(k) може бути у вигляді багаторозрядних десяткових чисел. В цьому випадку необхідно записати ці числа у двозначній системі числення і операцію суми по mod.2 проводити порозрядно.
Тризначна симетрична система числення (-1;0;1). Алгебраїчний поліном
Задана таблиця 4. Визначити компоненти bj (j= 0,1, …8) вектора b для алгебраїчного полінома:
Таблиця 4.
| x2 | x1 | F(xi) |
|---|---|---|
| -1 | -1 | 1 |
| -1 | 0 | -1 |
| -1 | 1 | 0 |
| 0 | -1 | -1 |
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | -1 | 0 |
| 1 | 0 | 1 |
| 1 | 1 | -1 |
Будується матриця C2:

Шуканий вектор b = C2 * F(xi)=

Поліноміальна математична модель: F(xi) = bt * P(X)= + — —



реалізує функцію F(xi)=( + )mod.3.
Тризначна симетрична система числення (-1;0;1). Модифікований поліном Жегалкіна
Задана таблиця 5. Для синтеза математичної моделі необхідно визначити компоненти bj (j= 0, 1, …, 26) вектора b для модифікованого поліному Жегалкіна. Поліноміальна модель F(xi) знаходиться як скалярний добуток двох векторів — bt та P(X).
Таблиця 5.
| F(xi) | -1 | 0 | 1 | -1 | 0 | 1 | -1 | -1 | -1 | -1 | 0 | 1 | -1 | 0 | 1 | 0 | 0 | 0 | -1 | 0 | 1 | -1 | 0 | 1 | 1 | 1 | 1 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| x3 | -1 | -1 | -1 | -1 | -1 | -1 | -1 | -1 | -1 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 0 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 | 1 |
| x2 | -1 | -1 | -1 | 0 | 0 | 0 | 1 | 1 | 1 | -1 | -1 | -1 | 0 | 0 | 0 | 1 | 1 | 1 | -1 | -1 | -1 | 0 | 0 | 0 | 1 | 1 | 1 |
| x1 | -1 | 0 | 1 | -1 | 0 | 1 | -1 | 0 | 1 | -1 | 0 | 1 | -1 | 0 | 1 | -1 | 0 | 1 | -1 | 0 | 1 | -1 | 0 | 1 | -1 | 0 | 1 |
Побудувавши матрицю C3 за рекурсивними співвідношеннями:
;

;


розраховується вектор b: b = [C3 * F(xi)]mod.3.
Визначивши компоненти вектора b отримаємо поліноміальну математичну модель модифікованого полінома Жегалкіна:
F(xi)= ( + * + * — * — * )mod.3.
Таблиця 5 реалізує функцію D-тригера. Змінним xi відповідають найменування входів і виходів: x1= Qt; x2= C; x3= D; F(xi)= Qt+1.
Алгоритм функціонування D-тригера описується формулою:
Qt+1 = [Qt * (1 + C + C2) — D * (С + C2)]mod.3
Література
- Пухов Г. Е., Евдокимов В. Ф., Синьков М. В. «Разрядно-аналоговые вычислительные системы». -М., «Сов. радио», 1978.
- Плющ Ю. А. Аппаратурная реализация функционального преобразования в специализированных вычислительных устройствах/ «Гибридные вычислительные машины». -К., «Наукова думка», 1979.
- V. Evdokimov, Y. Plushch, A. Chemeris «SYNTHESIS OF DISCRETE DEVICES ON BASIS OF BIT TRANSFORMATIONS»/ ROCZNIKI INFORMATYKI STOSOWANEJ WYDZIALU INFORMATYKI POLITECHNIKI SZCZECINSKIEJ NR 3. Szczecin, 2002.
- Автор. свид. СССР № 631918. МКИ3 G 06 f 15/32. БИ № 32, 30.08.79г.